基于新能源车型的低压蓄电池远程充电设计方案
2020-12-04刘新波刘植元何建标
刘新波 刘植元 何建标
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
0 引言
随着汽车电子技术的发展,汽车上所使用的电子设备越来越多,汽车的电耗也越来越大。必须保证汽车的低压12 V蓄电池有足够的能量用于汽车第一次的上电及启动。
本文提出了一种针对新能源车型的远程高配给低压蓄电池充电的设计方案,确保了低压蓄电池始终处于一种健康的状态,同时也防止了低压蓄电池过度的放电,从而影响到了蓄电池的寿命。
1 系统设计方案
远程充电系统是指在整车电源已处于OFF状态,同时车辆处于锁车的状态,此时如果低压12 V蓄电池的SOC被检测到低于某一阈值(该值需要针对不同的车型实车来标定确认),则会触发远程充电的功能。
该系统涉及与整车多个控制模块的交互,由于该系统需要在无人在车辆上的情况下给整车上高压电,因此必须保证系统的安全性。该系统需要实时电池状态信号、电池SOC、车辆的四门和两盖状态、充电时间、高压放电量以及本身故障状态等,只有多个控制模块共同协调合作,才能成为一个稳定高效的实时系统。
详细的系统结构框图如图1所示。低压蓄电池远程充电系统主要包含车身控制模块(BCM,Body Control Module)、 整车控制器 (VCU,Vehicle Control Unit)、网关模块(GWM,Gateway Module)、蓄电池、电池传感器(EBS,Electronic Battery Sensor)、智能远程通信系统(T-BOX,Telematics BOX)以及手机App等。
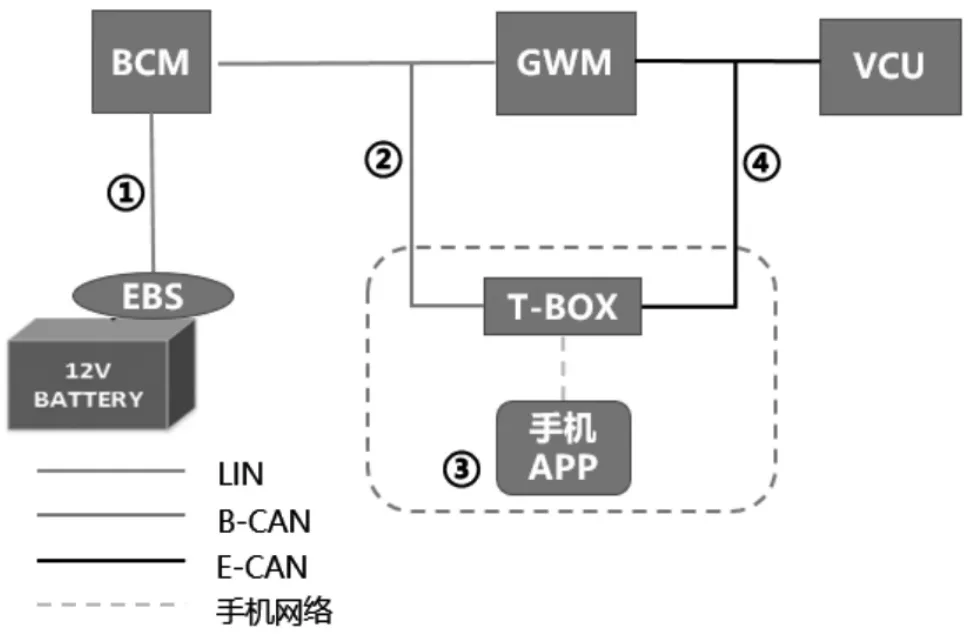
图1 低压蓄电池远程充电系统框图
2 详细设计
该系统涉及多个节点的交互,且涉及不同的CAN网络,因此在这里引入了网关对不同网络信号进行转发。
电源监控系统使用BOSCH提供的EBS,EBS作为一个LIN的从站,主站可通过LIN总线实时获取当前电池SOC、电流、电压、电池温度以及SOF,其通过总线来传输,硬线接口少,节约了成本。其内置LIN诊断功能,使用LIN2.1通信,通信波特率为19 200 bps,可直接安装在电池的负极[1]。
在这里BCM相当于一个LIN的主站,从站为EBS,同时其作为一个CAN网络的结点,波特率为500 kbps,通过CAN总线与网关、TBOX以及VCU等进行通信,详见图2。

图2 低压蓄电池远程充电系统网络架构图
充电主要分为如下四个步骤:
(1)车辆休眠一定时间后(如 30min)后,EBS开始检测到蓄电池,如SOC低于某一阈值(如30%,该值需要根据整车的状态以及蓄电池的不同进行实时标定确认),EBS唤醒网络,发出低电量提醒信号给到主节点BCM。
(2)BCM收到EBS发过来的信号,唤醒当前的CAN网络,把信息发送给网关,网关唤醒另外一条CAN网络,把相关的信息发送给TBOX和VCU。
(3)T-BOX收到网关的信息后,把相关的信息发送至数据后台,向用户发送短消息及App推送。
(4)用户通过App启用功能后,T-BOX接收指令。
(5)T-BOX通知VCU高压系统向12 V蓄电池充电,VCU判断条件满足后,执行动作。
为了保证系统的安全,若充电过程中遇到一些异常情况,或满足一定的条件后会自动退出,下面列举了部分退出充电的策略。
(1)检测到12 V低压蓄电池已经充电至一定的SOC,如95%及以上。
(2)充电时间累积达到一定的时间,如5个小时。
(3)高压系统异常,如BMS或VCU检测到内部的故障等。
(4)检测用户有使用车的情况,如车的门锁解开、用户将车辆上ready等。
(5)动力电池放电达到一定的值,如2 kW·h。
(6)其他异常情况,如网络通信故障等。
3 结论
采用带了低压蓄电池远程充电功能的车型,保障了用户每次都能正常启动和使用车辆,防止了12 V低压蓄电池亏电情况,大大提升了蓄电池的使用寿命和用户体验。
同时该系统采用总线通讯,可随时读取各个功能模块的软、硬件版本信息,方便记录与维修。在实际使用过程当中,用户通过手机App就可以直接操作实现对低压蓄电池的充电和查看蓄电池电量的操作,提升整车的科技感和体验感。
