一种IGSO卫星轨道维持时的偏航角调整策略
2020-12-01崔振季业刘伟杰王春元冯佳佳
崔振,季业,刘伟杰,王春元,冯佳佳
1. 北京控制工程研究所,北京 100094 2. 空间智能控制技术重点实验室,北京 100094
倾斜地球同步轨道(inclined geo-synchronous orbit,IGSO)卫星为保持太阳对单自由度翼板的垂直入射和天线的对地指向,采取了动态偏航模式。卫星控制系统通过对偏航角的控制,使太阳矢量始终保持在卫星本体坐标系的XOZ平面内,同时调整太阳翼的转角,使卫星太阳翼的法线方向始终指向太阳矢量方向,以获得足够的太阳照射来获取能量,保证星上的供电需求[1-2]。IGSO卫星的偏航角运动主要和太阳高度角以及太阳方位角两个因素有关,而卫星太阳高度角在每年的变化又和卫星的升交点赤经相关[3],因此,分布于不同轨道面的卫星因其升交点赤经的不同其偏航角的运动规律是不同的。在IGSO卫星进行轨道维持时,通常需要对偏航角进行调整,使卫星的推力方向平行于轨道切线方向。对于某些IGSO卫星来讲,例如IGSO导航卫星,在进行轨道维持的过程中,因为偏航角的调整及轨道控制会影响卫星业务,通常设置为单星不可用,将此卫星从星座的业务中分离出去,轨道维持完成后再择机恢复卫星业务。IGSO卫星轨道维持时的偏航角调整通常有多种策略可以选择,即选择不同的成对推力器都能完成同样的轨道控制任务,但不同的偏航调整策略所需要的时间不同。中外学者对于IGSO卫星的偏航角控制及其对轨道的影响等问题开展了一系列研究。文献[4-6]研究了倾斜轨道卫星的偏航姿态模型。文献[7-8]研究了IGSO卫星偏航姿态对太阳光压模型的影响。文献[9-14]分析了倾斜轨道卫星的偏航姿态对导航卫星定轨精度、轨道预报精度的影响。文献[15-16]分析了日本QZSS卫星及其偏航角控制对卫星轨道以及钟差的影响。这些研究成果及关注点主要集中在IGSO卫星的偏航角控制对卫星业务及卫星服务的影响分析上,对卫星轨道维持时的偏航角如何调整这一工程实际问题研究较少。随着中国北斗导航系统等倾斜轨道卫星在轨数目逐渐增多,在轨管理任务日益繁重,有必要研究卫星轨道维持时更有效的调整偏航角策略,以提高星座的在轨管理效率。
本文对IGSO卫星影响偏航角的因素以及偏航角的运动规律进行了分析,在此基础上从工程实用性出发,提出了一种卫星在不同工况下的偏航角调整策略,使卫星在各种工况下偏航角的调整范围最小,从而减少轨道维持过程的时间,减小轨道维持过程对卫星业务的影响,为倾斜轨道卫星在轨管理提供技术支撑。
1 IGSO卫星偏航角运动规律分析
1.1 动态偏航控制模式
首先定义卫星坐标系。
卫星本体坐标系ObXbYbZb:原点Ob位于卫星质心,Xb轴、Yb轴和Zb轴分别是卫星3个转动惯量的主轴。
轨道坐标系OoXoYoZo:原点Oo位于卫星质心,Zo轴指向地心,Yo轴指向轨道平面负法线方向,Xo轴与Zo轴、Yo轴构成右手直角坐标系。
卫星姿态通常采用滚动角、俯仰角和偏航角3个参数来描述。IGSO卫星为了满足天线对地指向和太阳翼法向正对太阳这两个在轨条件,姿态控制目标是使滚动角、俯仰角为0°,偏航角的控制目标是使太阳矢量始终保持在卫星本体的XbObZb平面内。这种偏航角控制方式通常称为动态偏航控制模式,偏航角Ψ的计算公式如下:
Ψ=arctan2(tanθs,sinα)
(1)

图1 偏航角随太阳方位角的变化Fig.1 Variation of yaw angle with solar azimuth
式中:arctan2为FORTRAN语言库函数中的一种反正切函数;α为太阳方位角,为太阳矢量在轨道系XoOoZo平面的投影与Zo轴的夹角,以从+Zo轴向+Xo轴转动为正;θs为太阳高度角,为太阳矢量与轨道平面的夹角,以太阳矢量指向轨道系+Yo面为正。图1给出太阳高度角θs为18°时,太阳方位角在一个轨道周期内0°~360°之间变化时,偏航角Ψ的变化曲线。
1.2 升交点赤经对偏航角的影响
IGSO卫星太阳高度角以年为周期变化,太阳高度角在一年中的最大值就是卫星轨道面和黄道面的夹角,影响太阳高度角最大值的主要因素是卫星的轨道倾角和升交点赤经。目前中国的IGSO卫星星座中,卫星的倾角一般为55°,分布在不同轨道面的卫星升交点赤经不同,则太阳高度角最大值的表达式为:
cosθs=cos23.5°cos55°+sin23.5°sin55°cosΩ
(2)
式中:Ω为卫星的升交点赤经。图2给出了随着升交点赤经的不同一年内太阳高度角θs绝对值的最大值的变化曲线。
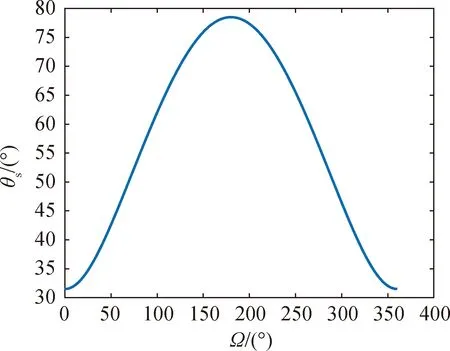
图2 不同Ω对应θs绝对值的最大值变化Fig.2 The maximum change in absolute value of θs corresponding to different Ω
通过式(2)计算及对图2的分析,IGSO卫星在不同升交点赤经时的太阳高度角θs的最大值变化规律如下:
1)当Ω=0°或360°时,太阳高度角θs绝对值的最大值最小,为31.5°。
2)当Ω=180°时,太阳高度角θs绝对值的最大值最大,为78.5°。
3)当Ω在56°~304°的范围内时,其太阳高度角θs绝对值的最大值在45°~78.5°之间。
太阳高度角绝对值的最大值随卫星轨道升交点赤经不同而变化,这个变化影响了偏航角的年周期变化。图3给出了偏航角随着太阳高度角θs和太阳方位角α不同的变化曲面。从图3可以看出,偏航角在一年的轨道周期中的曲面形貌差异是由卫星的太阳高度角最大值的差异造成的。
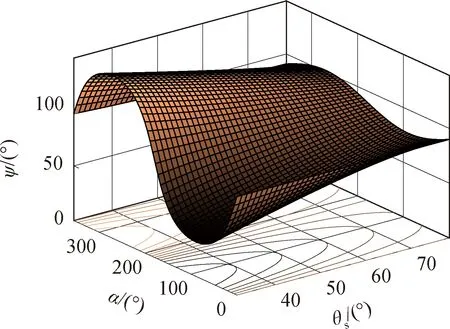
图3 不同θs和α对应的偏航角曲面Fig.3 Yaw angle surfaces for different θs and α
由此可以得到卫星偏航角的运动规律如下:
1)偏航角的变化是周期性的,由短周期变化和长周期变化叠加而成。长周期变化与太阳高度角的年周期变化有关,以年为周期,短周期变化与太阳方位角有关,以天为周期。
2)对于同一轨道面的卫星,由于升交点赤经相同,因此太阳高度角的最大值相同,偏航角的年周期变化曲面的整体形貌相同,对于不同轨道面的卫星,由于升交点赤经的差异,偏航角的年周期变化曲面的整体形貌有差异。
3)一年中卫星的太阳高度角在[-|θs|max,|θs|max]上变化,太阳高度角的最小值为0°,当太阳高度角为正值时,偏航角在每个轨道周期的变化幅度为θs~(180°-θs);当太阳高度角为负值时,偏航角的每个轨道周期的变化幅度为θs~(-180°-θs)。太阳高度角越大,偏航角的变化幅度越小;太阳高度角越小,偏航角的变化幅度越大。
4)对于Ω=0°或360°的卫星,太阳高度角θs绝对值的最大值取得最小值,为31.5°,偏航角在太阳高度角θs取得最大值时运动幅度最小,偏航角的变化幅度为31.5°~148.5°或-31.5°~-148.5°。对于Ω=180°的卫星,太阳高度角θs绝对值的最大值取得最大值,为78.5°,偏航角在太阳高度角θs取得最大值时运动幅度最小,偏航角的变化幅度为78.5°~101.5°或-78.5°~-101.5°。
2 卫星轨道维持时的偏航角调整策略
2.1 推力器的配置与布局
某在轨IGSO卫星的轨道维持所需推力由双组元推进系统的10N推力器提供,共安装12个10N推力器,分成A、B两个分支。推力器的安装方位如图4所示[17]。
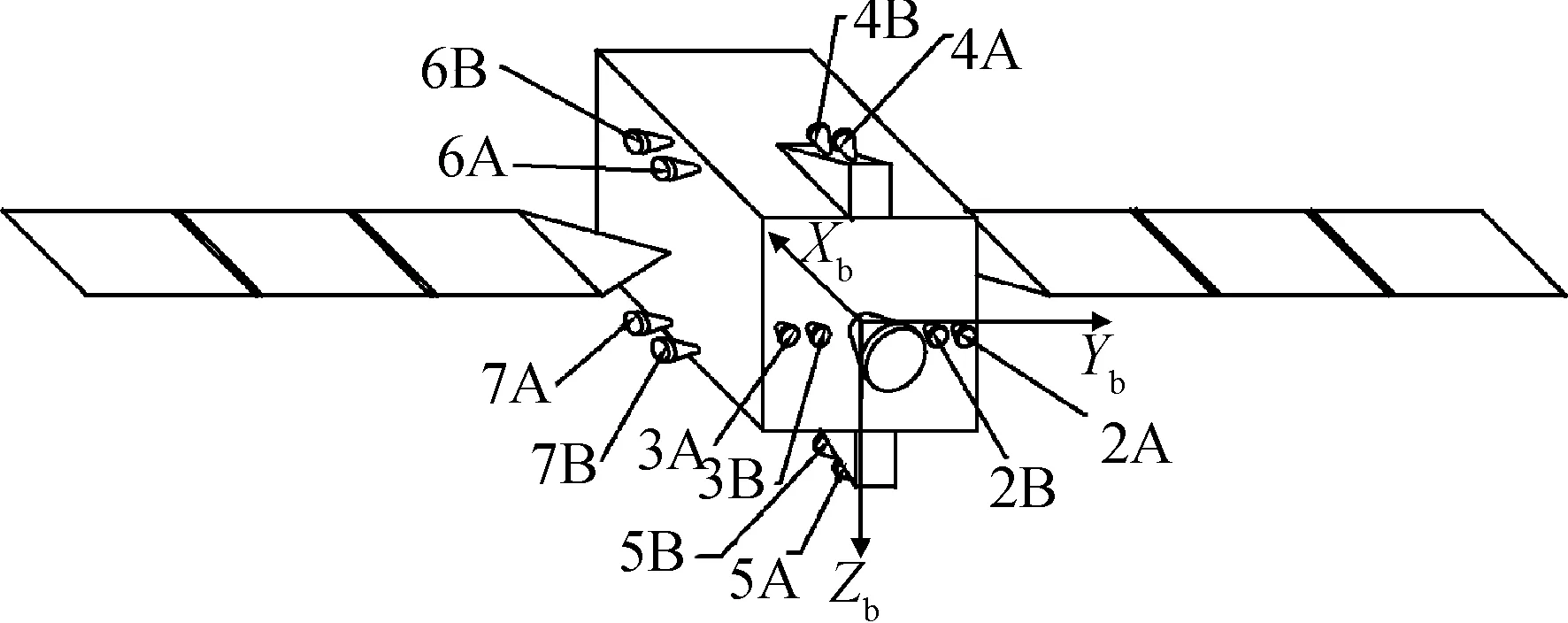
图4 卫星推力器的配置与布局Fig.4 Configuration and layout of satellite thrusters
每个分支中推力器2和3是一对,分别产生-Z和+Z方向控制力矩,两者成对同时工作可产生+X的轨控推力;推力器4和5分别产生+Y和-Y力矩,成对工作可产生-X推力;推力器6和7分别产生+X和-X力矩,成对工作可产生+Y推力。在进行轨道维持时,可以选用某一分支的两个推力器进行轨道控制。
2.2 轨道维持时偏航角的调整方法
把卫星轨道的XoOoYo平面分成如图5所示的6个区域,各区域的定义如下:
区域1为圆心角AOB对应区域,圆心角为90°,关于Xo轴对称。
区域2为圆心角BOC对应区域,圆心角为45°,与区域3关于Yo轴对称。
区域3为圆心角COD对应区域,圆心角为45°,与区域2关于Yo轴对称。
区域4为圆心角DOE对应区域,圆心角为90°,关于Xo轴对称。
区域5为圆心角EOF对应区域,圆心角为45°,与区域6关于Yo轴对称。
区域6为圆心角FOA对应区域,圆心角为45°,与区域5关于Yo轴对称。
表1给出了轨道维持时偏航角所处的范围与偏航角调整的目标值的关系,以及对应的推力器选择策略。为了获得轨道坐标系+Xo或者-Xo方向的推力,对卫星进行加速或者减速进行轨道维持,按照表1进行偏航角调整时,所需调整的偏航角最小。表中的2A3A、4A5A、6A7A分别表示A分支的3对推力器。
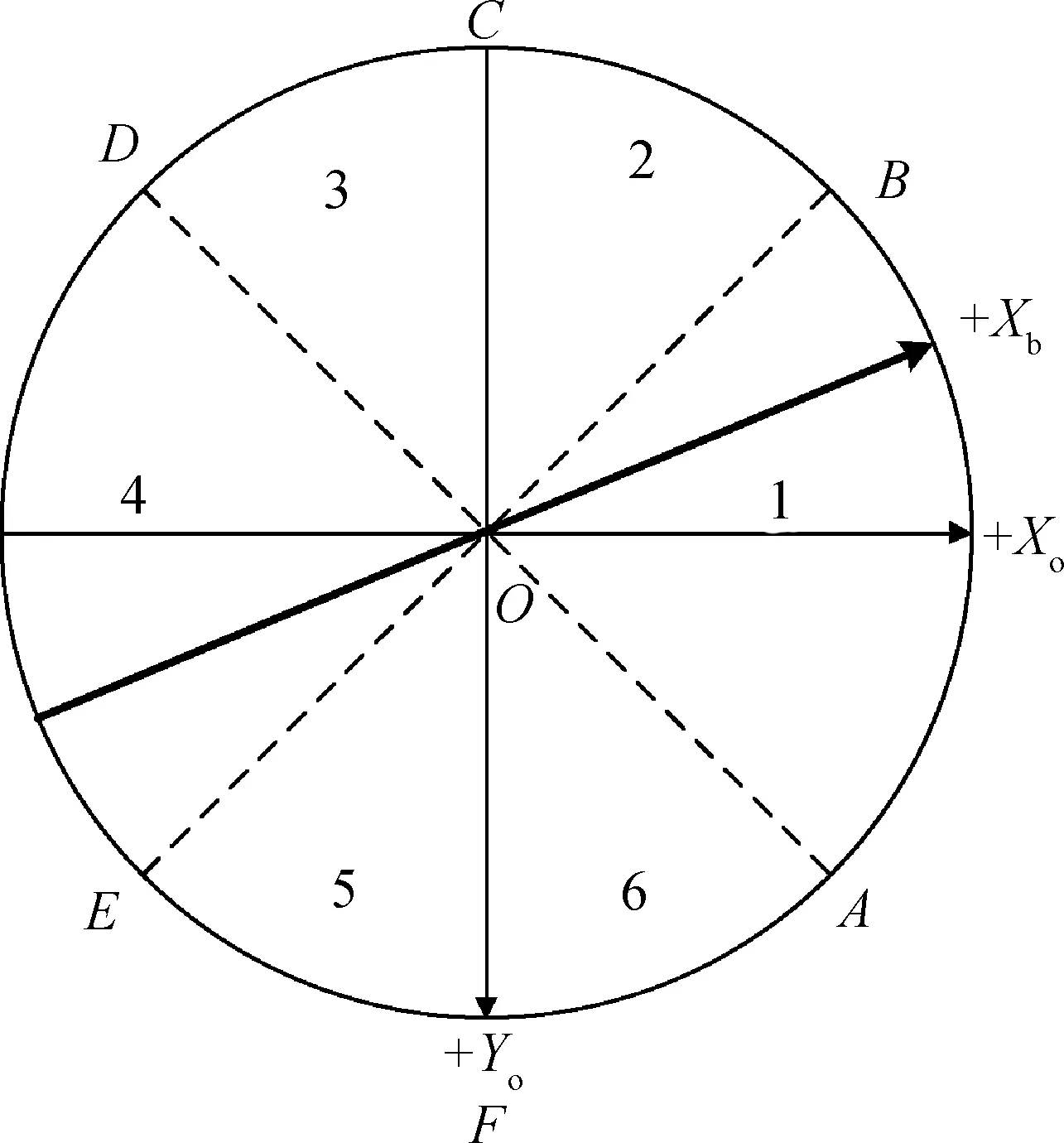
图5 卫星偏航角区域划分Fig.5 Satellite yaw angle division
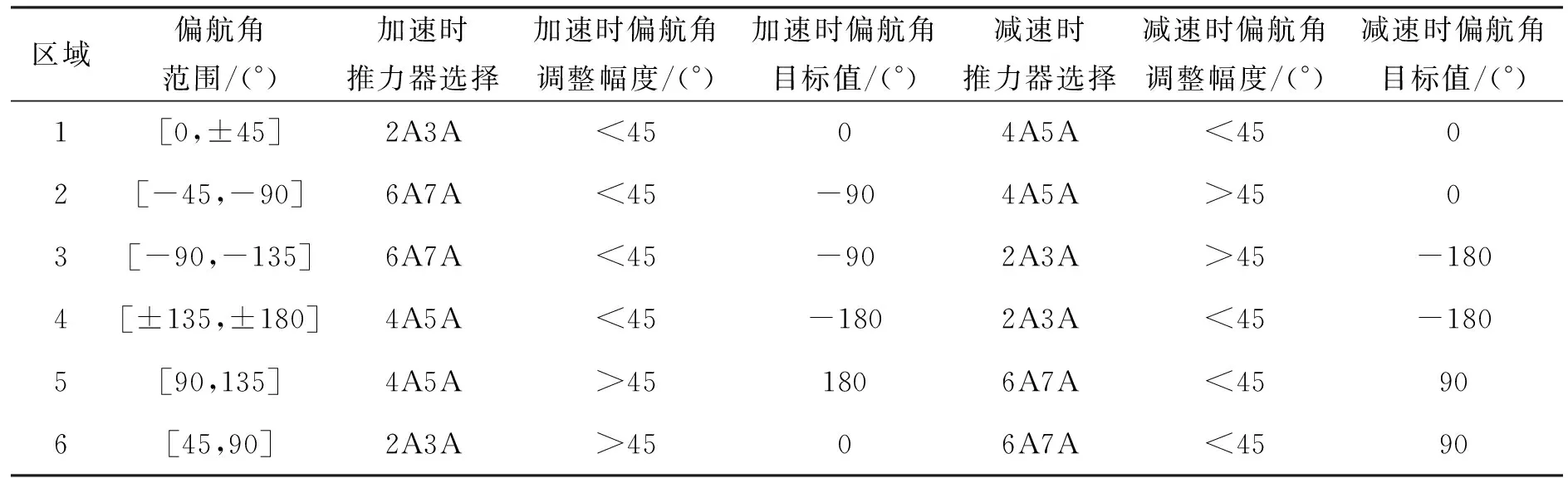
表1 偏航角调整策略与推力器选择
对于卫星轨道维持时的偏航角调整策略,有如下分析和建议:
1)当轨道控制的时间固定时,根据当时偏航角所处的区间,按照表1进行偏航角调整,并选择相应的推力器进行轨控,可以保证偏航角的调整量最小。
2)当轨道控制的时间可以选择时,应选择偏航角在区域1或者区域4的时间段进行轨道控制,无论是对卫星加速还是减速,偏航角的调整量均小于45°,可以避免偏航角的调整量大于45°的工况。
3)对于升交点赤经Ω在0°~56°或者304°~360°之间的卫星,因其一年中太阳高度角θs最大值不超过45°,轨道维持时应优选区域1或者区域4的时间段进行轨控。
4)对于升交点赤经Ω在56°~304°之间的卫星,因其一年中太阳高度角θs最大值超过45°,则在一年中太阳高度角θs超过45°的一段时期,卫星偏航角长期在区域2、区域3或者区域5、区域6运行,此时无法避免偏航角的调整范围可能超过45°的情况,偏航角调整量较大,可能导致测量偏航角的太阳敏感器不可用,只能使用陀螺等其他敏感器定姿。
5)对于同一轨道面的卫星,如果相位调整的周期较长,轨道控制时间可以选择的余地较大,应尽量选择太阳高度角较小的时间段进行。此时在一个轨道周期中偏航角的运动幅度较大,可以在偏航角接近0°附近时选择一对推力器进行加速或者减速,在偏航角运行到180°附近时选择同样的推力器进行减速或者加速,轨道维持精度更高。
6)对于中国IGSO卫星的交叉点[18]位置保持,由于交叉点位置通常在东经90°~东经120°的经度区间,轨道维持属于减速操作,应尽量避开区域2和区域3,以避免偏航角调整超过45°。
3 设计实例及分析
为验证偏航角调整策略的有效性,本节给出一个具体的IGSO卫星在轨管理中的实例。假设某IGSO导航卫星交叉点地理经度为东经118°,升交点赤经Ω=30°。由式(2)可知,太阳高度角θs绝对值的最大值为36°。因为在一年中太阳高度角θs最大值不超过45°,由前面的分析可知,轨道维持时应优选区域1或者区域4的时间段进行轨控。假设在卫星实际的太阳高度角θs为-20°附近时需要进行轨道维持,由于卫星的交叉点在东经118°,轨道维持属于减速操作。在轨道维持时,按照表1中的设计,需要避开偏航角位于区域2和区域3的时间段。每天当偏航角位于区域1时,选用4A5A的一对推力器,或者当偏航角位于区域4时,选用2A3A的一对推力器完成轨道维持操作,偏航角的调整幅度小于45°。
4 结束语
本文从卫星在轨管理的工程实际出发,针对IGSO卫星轨道维持时的偏航角调整策略进行了研究,主要结论如下:
1)分析了卫星升交点赤经对IGSO卫星偏航角运动规律的影响,在此基础上提出了一种卫星轨道维持时的偏航角调整策略,在轨道控制时可以使偏航角的调整幅度最小,从而缩短卫星轨道维持过程的时间。对于中国境内的IGSO卫星,提出了卫星在轨道维持时应优先选择的偏航角调整时机及调整方法,可以保证偏航角调整的幅度不超过45°。
2)对于IGSO卫星星座,卫星在轨数量的增加,导致卫星轨道维持次数的增加。通过本方法快速确定相关的偏航角调整以及推力器选择方案,可以应用于卫星在轨管理的实践中,为卫星的轨道维持操作提供参考。
