LFMCW雷达信号处理算法研究
2020-11-27史厚宝
史厚宝,戴 健
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
船用导航[1]雷达对各类船舶安全航行发挥着重大作用。近年来,经常发生船舶航行事故,造成了严重的财产损失和人员伤亡。导航雷达可用于探测船舶载体周围的船只、海岸线、桥墩、海岛、礁石等各类物体,给船舶驾驶员提供导航,并及时发出告警信息,提高船舶海面航行的安全性,顺利泊锚。随着固态发射机技术的发展和应用,船用连续波导航雷达具有辐射功率小、稳定性高、距离分辨率高、没有距离盲区、抗海杂波抗干扰能力强、具有良好的电子对抗和低截获性能等特点[2]。连续波导航雷达非常适用于中小型船舶。目前我国船用导航雷达技术发展较慢,所以研制采用线性调频连续波体制的船用导航雷达有着很大的市场潜力和现实意义。近年来,随着数字信号处理器和现场可编程逻辑门阵列的迅速发展,数字信号处理算法[3]在雷达系统性能中起到越来越明显的作用。为了提高雷达系统性能,需要对信号处理算法进行更加深入的研究、分析、仿真与验证。
1 线性调频连续波(LFMCW)雷达测距原理
雷达发射机发射锯齿波线性调频信号,在雷达照射的方向上设置一目标,以速度v匀速飞向雷达,发射信号遇到运动目标后反射,产生回波信号,回波信号与发射信号通过混频器混频再滤去高频项后,得到单个周期的差拍回波信号sb(t),可近似表示为:
(1)
式中:d1为空间传播衰减系数;d2为混频增益;B为调制带宽;Tm为调制周期;R0为目标距离;f0为扫频初始频率;θ1为由目标反射引起的额外相移。

(2)
进而可以求解出点目标的距离:
R0=frcTm/2B
(3)
又由fd=2vf0/c,很容易求解得到运动目标的径向运动速度:
v=fdc/2f0
(4)
对于静止或低速目标而言,多普勒频率fd=0,从而得到fr=fb。通过对差拍信号在距离向作一维FFT运算后进行频谱分析,可以得到差拍信号的中心频率fb。从而得到fr,目标距离R与差拍信号的频率fr成线形比例关系,只要检测到差拍回波信号的频率值,即可计算出目标的距离值。
2 LFMCW雷达信号处理原理
在本设计中,信号处理模块对目标回波数据信号先进行加窗 FFT 处理,提取各个距离的差频信号,然后通过非相参处理高信噪比,最后根据恒虚警(CFAR)准则进行比较判决;如果超过门限,判定为目标,提取距离与幅度信息。
(1) 加窗 FFT 处理
本设计中采用切比雪夫窗进行加窗,加窗可以用来抑制旁瓣,事实证明,加窗可以明显改善雷达图像。加窗FFT的原理框图如图1所示。

图1 加窗FFT的原理框图
I、Q两路差拍数据分别与切比雪夫窗系数相乘得到I、Q两路加权差拍数据,再进行FFT处理,得到I、Q频域差拍数据。
(2) 非相参积累

(3) 距离单元平均选小检测算法
当主要干扰来自于地物或海浪杂波,而不是均匀的噪声,则这些杂波往往具有严重的非均匀性。当待检单元位于或靠近具有不同反射率的区域边界处时,则恒虚警处理前后参考窗内的数据统计特性会有区别,将导致在杂波边缘处的检测发生虚警。
CFAR-SO 检测算法可以解决单边参考单元中出现多个干扰目标的问题,其主要思想是选取2个检测单元中功率较小者作为检测算法杂波水平。
具有保护单元的选大单元平均恒虚警(CFAR-SO)检测的原理方框图如图2所示。

图2 CFAR-SO原理框图
3 LFMCW雷达信号处理算法实现流程
本文根据LFMCW雷达的测距和信号处理原理,设计了LFMCW雷达信号处理系统的基本流程,LFMCW雷达信号处理系统将接收到的I、Q 2路差拍回波正交信号送至高速模数转换器(ADC)芯片进行采样,然后输出2路正交的数字差拍回波信号,在现场可编程门阵列(FPGA)内进行数据的缓存和处理后得到距离信息。
LFMCW雷达信号处理算法具体流程为:第1步先将天线得到的I、Q两路差拍信号进行模/数(A/D)转换处理,得到I、Q两路数字差拍信号;第2步将I、Q两路数字差拍信号运用切比雪夫窗进行加窗FFT处理,得到差拍信号的距离频谱;第3步,将差拍信号的距离频谱通过非相参积累算法,以简化目标环境,消除海杂波,确定目标个数,并同时标记出每个目标的谱峰位置;第4步,通过距离单元平均选小恒虚警率检测算法实现对目标的浮动门限检测处理,能够大大降低虚警率,输出每个目标更加精确的谱峰位置。通过对目标的谱峰位置进行分析,最终可以计算得出目标的距离信息。
LFMCW雷达信号处理流程如图3所示。
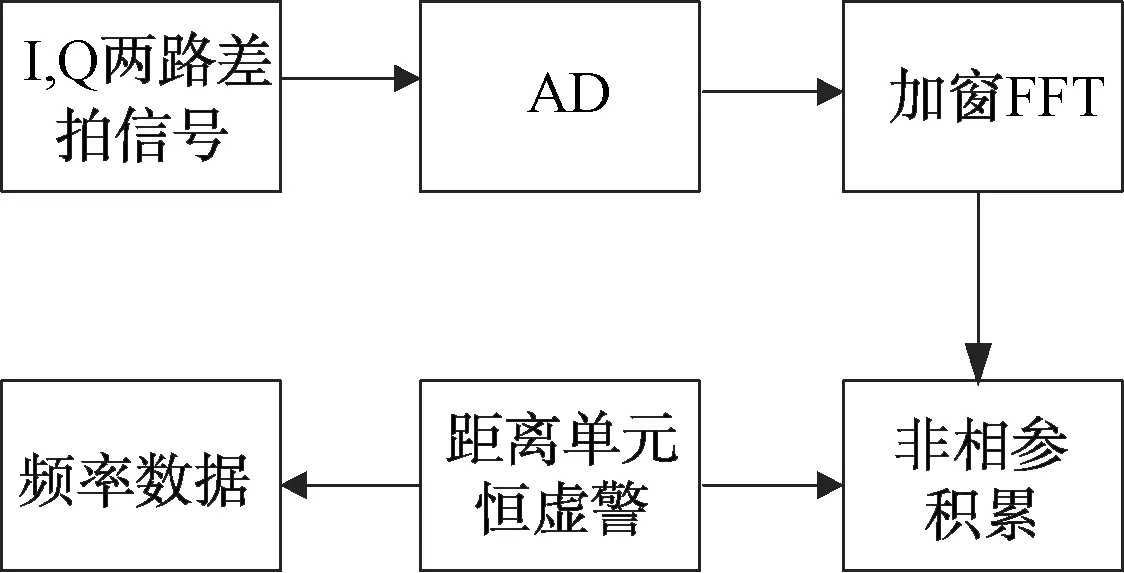
图3 LFMCW雷达差拍信号处理流程
4 LFMCW雷达信号仿真参数设定
本节对LFMCW雷达信号仿真参数进行了设定。仿真系统信号参数设定如下:线性调频带宽B=100 MHz,发射时宽t=220 μs,有效调制时宽tm=200 μs,采样频率fs=10 MHz,发射周期内有效采样点数为2 048个;信噪比(SNR)为-11 dB。用模拟的韦布尔模型的海杂波作为海杂波干扰信号,假设在雷达前方设置4个不同距离(单位m)、不同速度(单位m/s)的待检测目标,其距离及速度参数分别为X1(200,0)、X2(400,-20)、X3(600,10)、X4(700,40)。
5 LFMCW雷达信号处理仿真及分析
根据上节LFMCW雷达信号处理算法流程及所设定的目标信号参数,为了检验LFMCW雷达信号处理算法的可行性及有效性,用Matlab软件对整个LFMCW雷达信号处理过程进行仿真。下面对各个LFMCW雷达信号处理过程进行具体的分析。
一个重复周期内,4个仿真目标差拍回波信号添加韦布尔分布海杂波干扰信号之后的时域和频域波形如图4、图5所示。

图4 差拍信号时域波形

图5 差拍信号频域波形
对一个重复周期的差拍数据信号进行加窗FFT处理,先乘以汉宁窗系数再进行2 048点FFT运算并对幅度求模,得到相应的距离谱如图6所示。
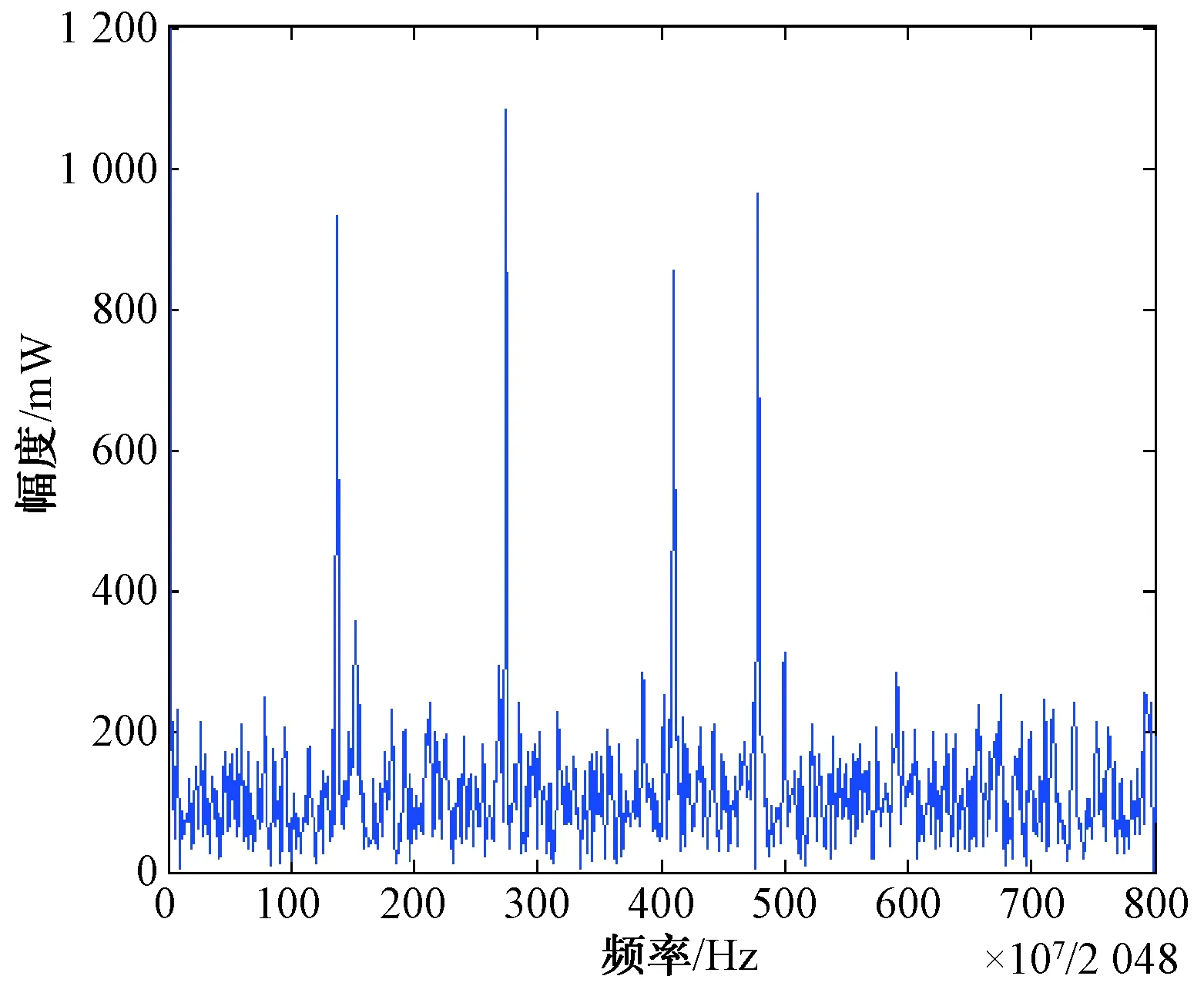
图6 加窗差拍信号频域波形
由图6可以看出,距离谱出现了4个目标谱峰,通过选用汉宁窗进行加窗FFT得到差拍信号的距离谱,这样可以有效降低差拍信号的频谱旁瓣,减小旁瓣造成的虚警概率以及对邻近目标的影响。
对加窗FFT运算后的距离谱通过非相参积累处理判定目标频谱峰值位置,非相参积累后处理结果如图7所示。

图7 非相参积累后频域波形
由图7看出,非相参处理后留下目标的谱峰信息,成功地检测到这4个待检测目标。同时对海杂波进行有效的抑制,信噪比得到了一定程度的提高。
对非相参处理后的距离谱通过距离单元平均选小恒虚警处理判定目标频谱峰值位置,距离单元平均选小恒虚警处理检测结果如图8所示。

图8 CFAR后频域波形
由图8看出,距离单元平均选小恒虚警处理后留下目标的谱峰信息,成功检测到这4个待检测目标,同时,对海杂波具有更加有效、明显的抑制,表明该检测算法具有稳定、良好的检测效果。
最后通过检测到的目标谱峰信息,得到频率信息,最终确定目标的距离参数。目标具体的距离参数如表1所示。

表1 距离参数仿真结果
从表1可以看出,本文设计的LFMCW雷达信号处理算法流程可以在复杂海杂波背景、多个目标环境下精确计算出每个目标的距离参数,距离误差在1 m之内。
6 结束语
本文首先研究了LFMCW雷达测距原理和信号处理算法,然后给出了LFMCW雷达信号处理算法的完整实现流程,通过Matlab软件仿真进行具体的验证和分析,最终实现较为精确的多目标测距。这表明本LFMCW雷达信号处理系统在复杂的海杂波背景下能够保持良好的性能。
