Web 下的实验室机器人驱动远程控制方法
2020-11-23龙曼丽
龙曼丽
(吉林大学,吉林 长春 130012)
1 引言
驱动控制是远程处理系统的核心执行环节,可根据动力学原理,将输出电机、协调控制器等多个元件统一在一起,在布施物理控制节点的同时,保障电能、动能转换行为的顺利实施。超声电机是最主要的驱动控制实施设备,具备较强的逆压电承载能力,可在定子、动子保持摩擦接触的情况下,缓解外部连接系统的电量传输压力,进而实现直线型电子与旋转型电子之间的定量转化。这种手段满足转向运动的传递机理,且超声电机不会产生无用的电磁波信号,这也是驱动控制策略能够直接应用于所有运动系统的主要原因,如电动汽车、感官机器人等都属于直接受到驱动控制行为影响的运动系统。
在实验室环境中,机器人主要负责实施危险系数较高的理化实验,在整个操作过程中,药剂用量、反应时间等数据都必须得到严格控制。针对此情况,相关学者进行了大量研究,文献[1]提出了连续驱动控制系统的设计方法,通过构建满足生产工艺和连机械结构两个方面的控制系统,在一定程度上为驱动系统设计提供新的控制思路和方案,但是在控制结果并不理想。文献[2]针对多相发电机的驱动与控制问题,基于矢量空间解耦理论对输出电流进行跟踪控制,这种控制方法通过搭建仿真模型,控制输出特性来实现有效驱动机器稳态运行,但是该方法的模型运用限制性较强。文献[3]为解决机器人驱动中数字信号处理的问题,利用驱动器芯片设计了一套无位置传感器驱动控制系统,该系统可保证机器运行的稳定性。文献[4]利用驱动轮同步工作的动力学模型,分解处理机器的每一个动作,实现安全高效的机器切割动作,其创新之处在于能够满足绳锯机的水下切割要求,但是该方法不适用于远程控制。文献[5]认为HDFS 手段能够针对实验室机器人的运动弱点,调度一切可利用控制节点,再根据Hadoop 框架中各个关节组织的力矩特征,建立与驱动行为相关的模型应用体系。这种方法虽然能够调度分属不同层次的关节设备,但很难从根本上完全激发实验室机器人的受控特性。
针对以往研究中存在的远程控制能力弱,机器人受控程度低的问题,提出Web 下的实验室机器人驱动远程控制方法,利用整体化驱动结构,分析机器人驱动运动学的建模特征,其创新之处在于按照Web 日志的挖掘需求,计算实际控制步长量的具体数值水平,以访问数据再次定义驱动远程机器人关节力臂运动节点的数据,并在后续检测实验中,通过PIS 受控系数、单位时间内驱动步长量两项指标,突出说明基于Web 拓扑结构的远程控制方法的实际应用能力。
2 实验室机器人驱动结构设计与建模分析
实验室机器人驱动结构设计与建模分析由整体结构搭建、关节控制力矩估计、运动学公式建立三部分组成,具体处理方法如下。
2.1 机器人整体驱动结构设计
整体驱动结构搭建是实现实验室机器人远程控制的核心设计环节,包含驱动信号接收器、Web 控制主机、信号传输装置、关节力臂、控制拨片等多个连接步骤。其中,轨道体位于整个机器人驱动结构的最上部,对所有下级执行元件起到负载支撑的作用。驱动信号接收器与Web 主机共同组成核心控制元件,可按照实验室机器人的实际运动情况,向外传输必要的远程协调指令,进而使位于两端的轨道体逐渐趋近,促使机器人进入持续性的行进状态。信号传输装置是机器人驱动平台的辅助执行结构,可将暂存于Web 主机内的远程控制指令传输至其它应用设备中,以保证整个驱动结构能够处于长久稳定的执行状态下[6]。控制拨片附着在关节力臂的内表面,直接控制实验室机器人每次行进的具体步长值,并以此保证Web 体系始终处于远程协调主机的控制之中。远程输出机位于机器人整体驱动结构的下端,与物理隔板直接相连,能在输出控制调节指令的同时,阻挡来自其它元件设备的物理驱动电流。机器人整体驱动结构,如图1 所示。

图1 机器人整体驱动结构Fig.1 Overall Drive Structure of Robot
2.2 关节控制力矩估计
关节控制力矩是指在驱动性远程控制的过程中,由关节力臂顶端到控制拨片的物理距离。在核心Web 体系保持相对稳定的情况下,驱动信号接收器会向机器人平台、传输装置等下级设备连续发送定向连接指令,进而使两个轨道体快速向着中心位置靠近,直至完全相接[7]。在此情况下,控制拨片会因为承载压力的增加逐渐向上运动,而关节力臂会因为控制器的驱动调节作用逐渐向下运动,两个执行设备之间的物理距离不断增加,最终与实验室机器人远程输出机的既定步长值完全相等。关节控制力矩的实际数值受到控制拨片位置信息、关节力臂位置信息的共同影响,若不考虑其它外部干扰条件,前者对于估计运算处理的作用效果为“正”,后者对于估计运算处理的作用效果为“负”。设—实验室机器人关节控制行为的上限处理向量—实验室机器人关节控制行为的下限处理向量,q0—控制拨片的原始位置信息,p0—关节力臂的原始位置信息,联立上述物理量,可将关节控制力矩的估计结果表示为:

式中:q1—控制拨片的真实位置信息;p1—关节力臂的真实位置信息;χ—远程控制指令的驱动传输向量;δ—幂次项应用处理系数。
2.3 驱动运动学分析
实验室机器人的运动主要依靠各关节间的相互配合实现,驱动远程控制主要指各关节力臂的运动行为,特别是位姿变化明显的控制拨片更是完全满足参考坐标系的构建需求。对于实验室机器人而言,各力矩角度可以通过驱动控制器测得,如何根据关节力臂位置和已知控制拨片信息得到准确的位姿数据,正是驱动运动学所研究的问题,也是实验室机器人远程控制过程中所必须的,因为只有实时检测到各驱动结构的当前姿态,才能做出相对合理的Web 控制计划,保证机器人躯体平衡稳定并以正常的步态行走。驱动运动学分析研究的是根据关节控制力矩状态规划出各力臂末端的连续位姿轨迹(相对于标准的参考坐标系),可以通过协调控制拨片与关节力臂间关系的方式,实现期望状态下的轨迹规划处理[8]。因此,驱动运动学分析是实现实验室机器人远程控制的操作基础,对于模型化的力矩估算问题而言,运动学是其应用关键所在。设e¯—驱动控制器的准行接入均值,y˙—Web 控制体系中实验室机器人的姿态驱动量,联立公式(1),可将驱动运动学的分析式定义为:

式中:t—远程驱动条件下的运动学指标向量;i1、i2—两个不同的关节力臂姿态系数;R—既定运动学分析指标。
3 基于Web 的远程控制方法
在实验室机器人驱动结构与建模原理的支持下,按照远程驱动控制器连接、Web 日志挖掘、实控步长量计算的处理流程,完成实验室机器人驱动远程控制方法设计。
3.1 远程驱动控制器
远程驱动控制器是位于实验室机器人的中部结构体,以PX24506 主板作为核心搭建设备,由驱动芯片、控制芯片、Web 芯片、远程协调芯片等多个设备共同组成。其中,PX24506 主板作为主体承载设备,执行所有与Web 体系相关的远程控制指令,直接与机器人整体驱动结构相连。驱动芯片、控制芯片与Web 芯片同处于远程驱动控制器的左端,远程协调芯片单独处于远程驱动控制器的右端。驱动芯片与Web 芯片保持并列相连的接入状态,在获取待挖掘Web 日志信息的同时,利用介质导线接收关节控制力矩的实际估计结果[9-10]。控制芯片连接线深入远程控制主机内部,能按照驱动信号接收器中的示数信息,执行驱动运动学的建模定义式。远程协调芯片掌管驱动控制器的通断连接行为,影响实验室机器人的实际移动步长,进而协调关节力臂与控制拨片间的物理距离。为使远程驱动控制器始终处于相对稳定的运行状态,每个芯片外部都负载一个结构型框架,借助旋调螺丝直接与PX24506 主板相连。远程驱动控制器结构,如图2 所示。

图2 远程驱动控制器结构图Fig.2 Structure of Remote Drive Controller
3.2 实验室机器人的Web 日志挖掘
实验室机器人的Web 日志挖掘主要针对内容、结构、爬虫三个方向共同实施。面对内容方向的Web 日志挖掘是指从实验室执行网页中获取有价值信息的手段,一般可按照实验室驱动程序中控制文本的具体分类条件,定义每次实控处理的深度数值,进而使机器人关节控制力矩逐渐贴合驱动运动学的建模公式。面对结构方向的Web 日志挖掘是指通过拓扑结构获取机器人驱动行为的手段,能够根据不同远程控制节点所处的位置,调节Web目录内的机器人访问模式,最终获取与实控步长量相关的物理实值[11]。面对爬虫方向的Web 日志挖掘是指以访问数据定义驱动远程节点的手段,可按照机器人关节力臂所熟悉的运动行为,规划可控性最高的驱动路径,最终使得实验室机器人能在最短时间达到理想目标点。设Z1—内容型Web 日志主体的驱动深度数值,Z2—结构型Web 日志主体的驱动深度数值,Z3—爬虫型Web 日志主体的驱动深度数值,联立式(2),可将实验室机器人的Web日志挖掘处理公式定义为:

式中:C—Web 控制体系中实际驱动行为的远程协调系数;
μ—待挖掘日志的结构化拓扑指标;
l—挖掘处理的实施时长;
Δd—机器人行进位移在单位时间内的真实变化量。
3.3 机器人实控步长量计算
机器人实控前进是指在一个控制周期内,由远程驱动控制器孤极电压信号引起的结构体运动行为,能够直接反应关节力臂的弯曲状态。孤极电压与整体驱动结构中的电机定子振动、电机转速等参量均保持相关性联系,是一种具有实控能力的物理指标。机器人实控步长量则是指单位时间内,每个前进步伐的具体数量级长度水平,受到多项数据参量的直接影响[12-13]。随着实验室Web 体系逐渐趋于完整,远程驱动控制器所产生的孤极电压信号也会不断增大,进而促使电机定子振动、电机转速等指标出现过度上升的变化行为,直至确保机器人结构体呈现平稳的前进状态。电机定子振动参量常表示为f′,可随远程驱动控制器执行时间的增加,而出现明显的积分性累积,但在变化的过程中受到定积分常量k↑与k↓的共同限制。—电机转速指标常表示,在单位执行时间内,直接作用于机器人实控步长量的物理数值,不受其它任何干扰因素的影响。设—单位执行时长,联立式(3),可将机器人实控步长量的计算结果表示为:

式中:j—实验室机器人的实控前进标量;η˙—Web 控制体系的驱动实施参数;l—远程驱动控制器的结构化行为系数;g—机器人的应用步长条件。至此,完成所有执行参数的计算与处理,实现基于Web 体系实验室机器人驱动远程控制方法的顺利应用。
4 实用检验与分析
为验证Web 下的实验室机器人驱动远程控制方法的实用性能力,设计如下比照实验。选取一台执行状态相对良好的机器人设备作为实验对象,以整个实验室作为目标实验区域,分别将实验组、对照组协调程序输入机器人设备之中,其中实验组检测计算机搭载新型驱动远程控制方法,对照组检测计算机搭载常规HDFS 手段,在既定单位时间内分别记录实验组、对照组指标数据的具体变化情况。
4.1 驱动效应环境
在确保机器人设备进入稳定执行状态后,借助连接线路将实验组、对照组记录数据分别导入检测计算机中,利用相关信息处理软件,分析两组数值的真实变化水平,并根据数据节点所处位置,绘制实验表格及信息曲线,实验所用的检测设备和检测主机,如图 3、图4 所示。

图3 实验室机器人设备Fig.3 Laboratory Robot Equipment

图4 实验检测主机Fig.4 Test Host
4.2 机器人PIS 受控系数
PIS 系数直接影响实验室机器人的受控特性,在不考虑外界干扰的情况下,PIS 系数指标越高,实验室机器人的受控能力也就越强,反之则越弱。下表反应了60min 的实验时间内,实验组、对照组机器人PIS 受控系数的具体变化情况,如表1、表2 所示。
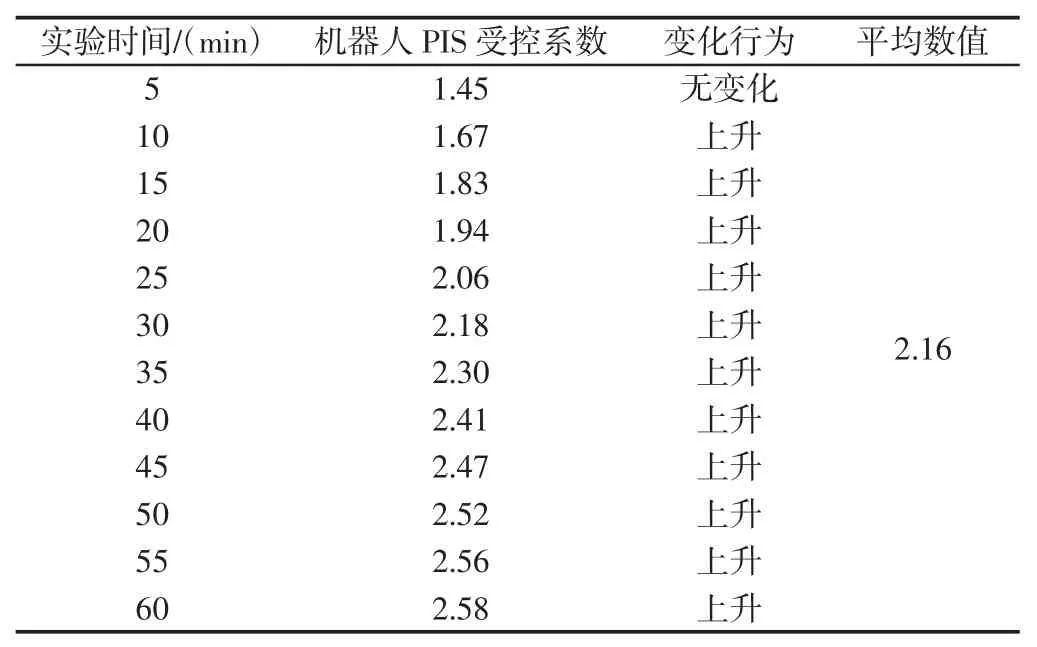
表1 实验组机器人PIS 受控系数Tab.1 PIs Control Coefficient of Experimental Group Robot

表2 对照组机器人PIS 受控系数Tab.2 PIs Control Coefficient of Control Group Robot
对比表1、表2 可知,实验组、对照组机器人PIS 受控系数的起始数值均为1.45,但在整个实验过程中,实验组受控系数一直保持不断上升的变化趋势,而对照组受控系数则维持上升、稳定、下降趋势接连出现的变化状态。从极限数值的角度来看,实验组机器人PIS 受控系数的最大值达到2.58,但对照组机器人PIS 受控系数的最大值仅达到1.56,远低于实验组水平。综上可知,随着Web 下的实验室机器人驱动远程控制方法的应用,PIS 受控系数达不到理想水平的问题得到有效解决。
4.3 单位时间内的驱动步长量
以5min 作为一个单位时长,分别记录在8 个单位时长内,应用实验组、对照组控制方法后,实验室机器人驱动步长量的具体变化情况,如图5、图6 所示。

图5 实验组驱动步长量变化图Fig.5 Driving Step Size Change of Experimental Group

图6 对照组驱动步长量变化图Fig.6 Driving Step Change of Control Group
对比图5、图6 可知,在整个实验过程中,实验组、对照组驱动步长量均呈现下降、上升交替出现的变化趋势,在第(6~7)个单位时长内,先后达到极值水平25m 与15m,实验组数值远高于对照组数值。综上可知,随着基于Web 远程控制方法的应用,单位时间内机器人驱动步长实值确实得到了一定程度的促进。
5 结语
在常规HDFS 手段的基础上,新型远程控制方法联合Web 体系,通过估计关节控制力矩的方式,形成驱动运动学的主要应用公式,再根据挖掘日志的处理行为,重新定义机器人驱动节点数据,计算实控步长量的数值水平,实现实验室机器人驱动远程控制。结合对比实验数据来看,PIS 受控系数、驱动步长量均出现不同程度的提升,不仅充分激发了实验室机器人的受控特性,也证明Web 拓扑结构在远程驱动策略中确实具备较强的应用主导价值。
