一种改进的动态灰色GM(1,1)模型在深基坑形变监测中的预测分析
2020-11-09李豪杰独知行赵曰耀张家威
李豪杰, 独知行, 石 娴, 赵曰耀, 张家威
(山东科技大学测绘科学与工程学院, 青岛 266590)
地铁深基坑的形变监测易受到周边高层建筑、道路及基坑自身荷载的影响,沉降波动较大,传统GM(1,1)模型主要对具有强烈指数规律的单调序列预测效果明显,这给深基坑沉降的后续预测增加了难度,为确保工程安全稳定运行,采用合适的模型改进方法显得尤为重要[1-3]。蒋诗泉等[4]提出应用数值积分思想提高模型参数精度,即通过复化梯形公式对传统GM(1,1)模型背景值进行优化,经算例分析验证了优化后模型对于背景值误差的修正作用;张贵钢等[5]通过权衡信息的时效性,构建了动态GM(1,1)模型,并且通过残差改进,进一步提高了预测值的精度;徐旭等[6]直接从灰色系统理论出发,对非等时距观测值进行变换处理,并在传统模型基础上结合残差GM(1,1)模型,证明了改进方法在高层建筑沉降的可行性。以上模型仅进行了一种或两种方法的改进,且在背景值优化时梯形公式的高次插值会出现Runge现象,得到的预测结果均有待提高。鉴于此,本文以某地铁深基坑工程为例,利用复化Simpson3/8公式优化背景值,同时兼顾新信息的权重和预测残差值,建立了基于背景值优化和残差改进的动态GM(1,1)模型,开展基坑沉降预测研究,取得了良好的实验结果。
1 传统的灰色GM(1,1)模型
1.1 模型构建原理

根据最小二乘原理,解上述微分方程可得:[a,b]T=(BTB)-1BTY,式中:
(1)
则预测值关于时间序列的映射函数即为白化方程的解:
(2)
最后通过累减实现序列还原,预测公式为
(3)
1.2 模型精度评定
为了保证模型预测分析的可靠性,必须对构建的模型进行评价,一般采用后验差检验法[9]。
对于评定构建出模型的好坏,主要看C和P,总体来说,C越小越好,P越大越好,具体的精度评定标准如表1所示[10]。

表1 模型精度检验标准
2 改进后的动态GM(1,1)模型
2.1 背景值的优化
灰色GM(1,1)模型预测精度主要取决于参数a、b,而a、b的取值依赖于背景值的构造形式,因此,背景值的构造公式直接影响到模型的预测精度[11]。采用的复化Simpson3/8公式进行优化,即在区间[k,k+1]上选取系列等距分点作为插值节点,利用函数逼近的思想求解背景值。
(4)
B=lnx(0)(k+1)-lnx(0)(k)
(5)
(6)
则称x(1)(t)=AeBt+C,(t≥1)为累加序列的预测模型。
记积分区间[k,k+1]=[a,b],将区间分成n等份,步长h=(b-a)/n,等距分点tk=a+kh,当n=3时,相应的Simpson3/8插值求积公式如下:

(7)
若将每个子区间[tk,tk+1]划分为3等份,内分节点依次记作tk+1/3、tk+2/3,则复化Simpson 3/8公式即为区间[a,b]内的背景值z(1)(b):

(8)
选定区间划分的份数n后,计算每个子区间的内分节点对应的累加值,再应用式(8),得到优化后的背景值。相比较传统的算术均值、复化梯形公式,复化Simpson 3/8公式将积分子区间更加细化,对于区域内积分面积的把握更加准确,进而改善了背景值的求积精度。
2.2 动态GM(1,1)模型原理
传统的GM(1,1)模型本质上是指数函数,预测值随时间的增加呈单调递增的变化。在形变监测中,被监测建筑物往往处于一个波动起伏的动态系统中,此时若直接采用传统的GM(1,1)模型进行长期预测,预测值将随时间得增加误差不断增大,精度不断降低[12]。因此需要在预测中加重新信息的权重,即实时引入新的监测信息,淘汰时序相距较远的监测信息,这样改进后的动态 GM(1,1)模型能够比较准确地反映系统的变化状况,从而有效提高形变预测的精度。
利用动态灰色模型进行预测时,要确定好模型的维度,即构建传统模型时的总期数n。首先通过传统的GM(1,1)模型预测得到t=n+1时刻的沉降;再引入实测中t=n+1时刻的沉降x(0)(n+1),同时去掉原始序列中的x(0)(1),构建n维动态GM(1,1)模型序列X(0)={x(0)(2),x(0)(3),…,x(0)(n+1)},得到新的GM(1,1)模型,进而预测t=n+2时刻的沉降值x(0)(n+2)。以此类推,逐个预测,得到实时更新的沉降预测值。
2.3 灰色模型的残差改正
为了达到更好的预测效果,采用n期残差序列作为原始观测数据,构建残差GM(1,1)模型,预测t=n+1时刻的残差值,并结合原来的预测模型进行修正。其改进措施如下:
利用残差原始序列建模:
(9)
联立原模型,构建残差改进后的GM(1,1)模型:
(10)
3 实例分析
该工程主要是对某地铁车站深基坑进行地表沉降监测,在主体基坑施工过程中,围护桩受到自身轴力、桩顶水平位移、桩体水平位移影响,观测数据浮动较大。为了更好预测工程后续的沉降变化,保证车站长期运营和后续维护,从背景值、动态序列、残差值三个方面出发,对模型逐步改进,并将预测值与实测值进行比对分析。现选取沉降观测中较为典型的点位,同时为了确保初始序列呈等时距,选择14期月初的观测数据进行计算分析。利用1~4期沉降观测值构建传统的GM(1,1)模型,得到的时间响应关系式为

(11)
根据2.1中的定理,通过优化背景值来改进模型求解,优化过程大致为①计算原始序列累加值AGO,将每个区间二等分;②在区间[1,2]内计算累加序列模型x(1)(t)=AeBt+C,并求出各内分节点值;③应用复化Simpson3/8插值求积公式求解改进的背景值z(1)(2)。
以此类推,得出各个区间改进后背景值,构成新的背景值序列Z(1)={z(1)(2),z(1)(3),…,z(1)(n)}。选择前4期沉降数据构建背景值优化GM(1,1)模型,得到优化后的模型关系式为
22.878 1
(12)
两种模型的构建结果如表2所示。
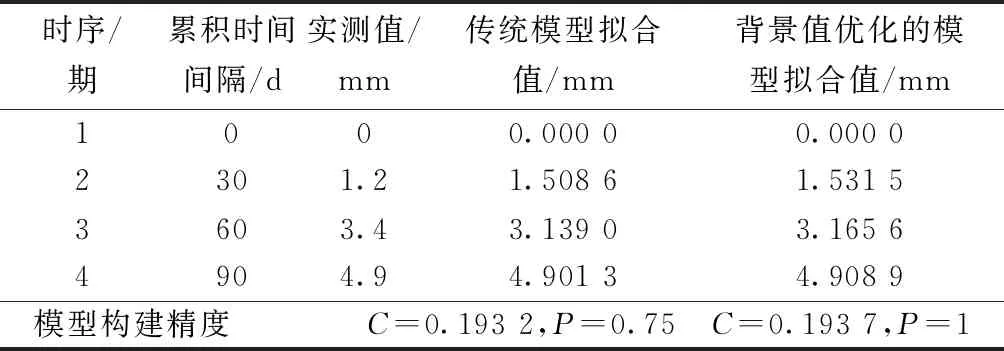
表2 构建传统GM(1,1)模型与背景值优化的GM(1,1)模型
结合表1、表2,选择1-4期观测值构建的传统模型精度为合格,背景值优化的模型精度为优秀。相比于传统模型,背景值优化的模型将构建精度提升两个等级,改善效果明显。由此可见,本文提出的基于复化Simpson3/8公式构建的模型对于波动性较大的数据更具适应性。
根据表2,两种模型均可以进行进一步的预测分析,得到的结果如表3所示。
可见随着时序的增加,实测值离散速度变快,传统模型的预测值与实测值出现较大的偏差,模型整体的预测精度降低。通过优化背景值建立的新预测模型,每一期的相对误差均有改善,但是后期得到的预测值仍不理想,进而考虑在此基础上构建动态优化模型。
通过实时更新观测数据,构建动态GM(1,1)模型,即利用前4期数据建模,预测第5期数据,然后用第5期数据取代第1期数据重新建模,预测第6期数据,以此类推,得到动态预测序列。同时,考虑到残差对预测值的影响,以动态GM(1,1)模型预测值残差为原始序列,构建残差GM(1,1)模型:

(13)
经残差、背景值改进,可以求得动态GM(1,1)模型时间响应函数式为

(14)
代入计算每一期的预测值,分析比较改进后模型的优越性,结果如表4所示。

表3 传统GM(1,1)模型与背景值优化的GM(1,1)模型预测结果

表4 经背景值优化的动态GM(1,1)模型与经残差、背景值改进的动态GM(1,1)模型预测结果
根据表4,经背景值优化的动态GM(1,1)模型的平均相对误差为6.646%,经残差、背景值改进的动态GM(1,1)模型的平均相对误差仅为3.047%。对比表3结果,动态改进后的模型每一期相对误差均明显减小,其中通过残差改进,预测值精度更高,与实测值更为吻合。利用预测值绘制拟合曲线,如图1所示。

图1 传统模型和改进后模型预测值比较Fig.1 Comparison of traditional models and improved model predictions
由图1可以看出,观测期间原始数据的波动起伏较大。从第10期观测开始,观测值逐渐趋于稳定,传统GM(1,1)模型和背景值优化的GM(1,1)模型仍保持单调上升的趋势,与实测值差距越来越大。基于残差、背景值优化的动态GM(1,1)模型始终随着观测数据的变化而变化,且二者的数值十分接近。
4 结论
在传统GM(1,1)模型基础上,利用复化Simpson3/8公式优化背景值,进而改善了模型的整体精度,这在模型构建中体现较为明显,但随着期数的增加,预测值与实测值间出现较大的偏差。通过构建背景值优化的动态GM(1,1)模型,可将预测精度提高23.405%,预测值与实测值趋势更加吻合。考虑到在新旧信息迭代过程中不可避免会累积一些观测值偶然误差,为此进行的残差改进可将模型预测精度再次提高3.239%。因此,基于背景值优化、残差改进的动态GM(1,1)模型精度更高,更具适用性,继而可以作为该工程的预测模型来进行后续的研究分析。
