新型大枣去核机的设计及运动分析
2020-11-07张剑锋
王 华,张剑锋
(1.商丘职业技术学院 机电工程系,河南商丘 476005;2.郑州大学 农学院,郑州 450001)
0 引言
我国是大枣生产大国,大枣不仅具有丰富的营养价值,而且还拥有药用价值,具有很强的保健功能,深受广大群众的喜爱[1];目前大枣去核的主要方式有:手工去核、半自动化去核、全自动化去核三种[2]。高举[3]设计一种新型大枣深加工设备,通过试验验证了整机工作的可靠性。王占领[4]设计了一种大枣去核划皮装置,去核后果肉的完整性和去核效果良好,工人的劳动强度大大降低。闫天翔等[5]用三维CAD软件设计出一种新型履带式大枣自动去核机,为大枣去核自动化中的传动设计、定位夹具设计等技术难题提出了一种新型的解决方法。朱克庆等[6]介绍了一种新型大枣去核机的结构和工作原理,对主传动机构的设计原理、结构组成、运行特征进行详细的阐述。
当前市场上大枣去核机去核过程中存在的主要问题是:大枣去核定位不准确、破损率高、不能完全适应各种直径的大枣去核、加工范围小、不能完全实现速度调节控制、耗电量大、设备体积大、占地面积大等缺点。本文设计了一种新型的三杆三点式顺位定位机构,扶枣正,去核率高,破损率低,三杆三点式顺位机构,适应性强,能完全适应各种直径的大枣去核定位,加工范围大,可以实现无级变速,可以随意调整去核的速度,操作简单方便,故障率低,使用寿命长,耗电量低,设备体积相对较小,占地面积小等优点。为后续设计出新型的大枣工业自动化去核装置提供参考依据。
1 大枣去核机整体设计方案
大枣去核机的基本组成机构如下[7-8]:包括顶板、齿轮、弹簧、上下底板、电磁铁、支撑杆、顺位杆、球杆等机构组成,整体结构设计方案如图1所示。
大枣去核机整体工作过程如下:
首先大枣进入料斗内,利用电磁铁控制大枣的进料规律,当其中的一个大枣滑出后,隔板被电磁铁提起,从而实现大枣有顺序的逐个进入料斗中。
当大枣进入顺位定位机构后,电机启动通过传动机构将动力传到顺位杆,带动顺位杆匀速同向转动,围成圆锥形的三个顺位杆的各个杆的倾斜角度是0°~6°,大枣通过自重进入顺位定位机构中,由于摩擦力的存在,大枣自转,逐渐达到重心稳定状态,大枣摆正,顺利实现准确定位,最后去核刀完成大枣的去核。
2 主要部件的设计及运动分析
2.1 顺位定位机构的设计
顺位定位机构主要包括[9]:上顶板、顺位杆、机架上固定杆、连接弹簧、球头关节、机架底座、限位螺母、十字轴万向节、顺位杆从动轴、主动轴、主动齿轮、从动齿轮等;三杆三点式顺位机构顺位原理如下:如果大枣投料后位置不正确,大枣与三杆的三点接触后,在摩擦力的作用下,大枣与三杆一起转动,经过多次平衡耦合,大枣的最终状态是三个接触点的线速度与角速度都相同;当大枣摆正后,三个接触点线速度与角速度才能最终都相同,此时大枣受到三根杆的支持力在竖直方向的分力合力与大枣的重力平衡,此时水平方向的分力也相互平衡,完成了大枣的顺位定位。顺位定位机构示意图如图2所示。
2.2 顺位定位机构三维简化模型及运动简图
顺位定位机构是由两球面副和两转动副连接而成的四杆机构,该顺位机构运动特性远比平面四杆机构复杂的多[10-11];该机构具有结构紧凑、灵活多样、占用空间少、工作可靠及运动平稳等特点。图3是顺位定位机构中的其中一个单杆的三维简化模型及机构运动简图,该机构主要由曲柄、连杆、摇杆、机架组成,其中曲柄为输入轴,绕O点在XOY平面内转动,连杆作三维空间运动,A点在XOZ平面内运动,B点在YOZ平面内运动,摇杆在平行于平面YOZ的平面内摆动。
2.3 顺位定位机构的运动分析
首先建立如图3(b)所示的空间直角坐标系[12-13],L1、L2、L3分别表示各杆长度,α1z表示曲柄与Z轴正方向之间的夹角,α3yz表示摇杆和Y轴正方向之间的夹角。点C的坐标用xC、yC、zC表示。对图3(b)所示的简化机构建立空间矢量方程,可得:
将(1)式向各个坐标平面投影,可得:
由(2)式可得:
将(3)式的第二、第三式两边平方后相加得:
由机构的结构可知:βyz>α3yz。
令
由(2)式可知:
同理可得 α2y和 α2z。
将(2)式对时间t求一阶导数,得:
又cos2α2x+cos2α2y+cos2α2z=1,将该式对时间t求一阶导数,则
在图3所示的空间简化机构中,假定L1=30 mm,L2=150 mm,L3=50 mm,机构处于初始位置时α1z=0°。将相关数据代入相应的表达式中,计算出相应的值,绘制相应的曲线,得到该机构中摇杆的运动特性曲线如图4所示。
3 顺位定位机构的运动仿真分析
通过利用Solidworks Motion软件进行仿真分析顺位定位机构的运动[14],验证结构设计的合理性,以及解析分析的正确性。
3.1 添加约束
根据Solidworks Motion软件中已经建立的模型,分别将曲柄、连杆、摇杆完成铰链机械配合关系的添加,同时插入两个机架零件到相应位置,并将机架设定为固定状态,完成整个机构初始位置的设定。
3.2 设置算例属性
完成整个机构的初始位置设定后,在“Motion Manager”工具栏中,运动算例属性中设定仿真的相关参数,曲柄上设置马达转速为“60RPM”,完成马达参数的定义。为了实现整体运动完成一个周期以及更加清晰的观察顺位定位机构的运动,设定算例时间为1 s,每秒帧数为250,其他设置采用默认值,参数设置如表1所示。

表1 算例各参数
3.3 仿真结果分析
在Motion Manager工具栏选择“结果和图解”,在“结果”下方分别选取“位移和速度”,在“子类别”中选择摇杆机构作为对象,选择“路径跟踪”生成位移和速度新图解;在弹出的快捷菜单中打开“结果”,将“结果”输出到CSV文件,最终得到摇杆机构的运动特征仿真曲线图如图5所示。
从仿真结果可以看出:(1)顺位定位机构的运动规律与定位机构各杆的长度和各杆的位置角度有关;(2)对顺位定位机构的运动用数学向量方法求得解析式方程与仿真求得波动图完全一致,验证了用数学向量法分析顺位定位机构运动规律的正确性。
4 大枣去核机样机试验
4.1 试验方法
为验证本设计结构的合理性和可靠性,根据设计方案制作出样机[15]。试验时,人工随机挑选400颗大枣,分成5组每组80颗,进行试验。
设置顺位杆直径为20 mm,倾斜角度为10.44°,顺位杆转速为 540°/s,试验后,对大枣的去核率、顺位率、破损率等数据进行统计,对设计的装置进行验证。
4.2 试验结果分析
试验结果表明:新型大枣去核机整体平均去核数约为74颗,平均去核率为92.5%,最低去核率为90.4%,顺位率为95.34%,平均破损率为3.22%,生产率为0.836粒/s;该设计的去核装置机构的试验结果如表2所示。
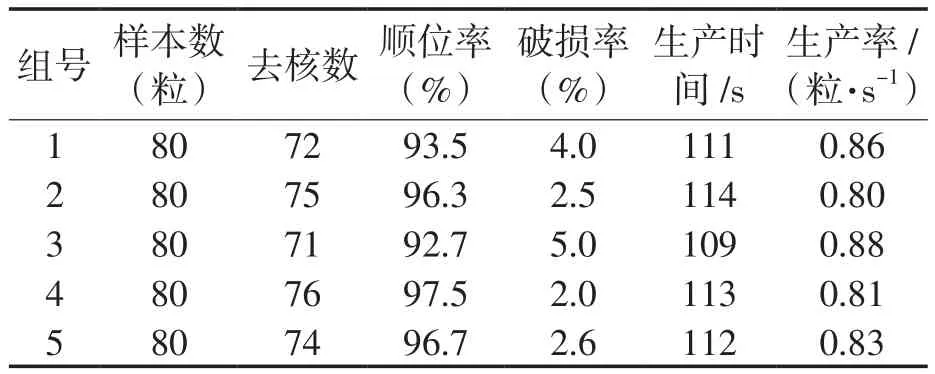
表2 大枣去核试验结果
5 结语
(1)本文设计的大枣去核机有结构简单、紧凑、体积精巧、去核质量高,果肉浪费少等优点;(2)本机构提出的一种三杆三点式顺位机构,运用同一椭圆球体上的线速度和角速度的关系,成功的设计出了一种快速、准确定位的顺位机构,解决了自动去核定位不准确的问题;(3)通过运用数学向量方法求得顺位定位机构解析式方程,通过运用仿真运动软件求得顺位定位机构的波动图,仿真分析结果验证了用数学向量法分析顺位定位机构运动规律的正确性;(4)目前该机构还不能完全应用到工业生产中,还不能实现工业自动化生产,需要进一步研究最终实现工业自动化生产。
