手术床的二级提升设计
2020-11-02杨旗薛强
杨旗 薛强
(沈阳理工大学机械工程学院,沈阳 110000)
当前手术床设计在智能化方面创新较多,往往忽略了机械结构上的新思维。智能化方向主要为PLC,控制电路设计新颖,以及部分故障检测及时反馈设计,但结构方面比较普通,多采用液压和电机驱动,提升装置多是一阶提升,行程较大,易出现应力集中及不稳定的问题。若行程过大,在极限行程使用时油缸内的油会对活塞和导向套密封件形成回流背压状态冲击,若是限位不精准还容易造成碰撞损伤。为此,设计一种手术床的二级提升装置,减小单个液压缸提升行程,对手术增添稳定性和可靠性。
1 二级提升的工作原理及结构设计
选用二级提升装置,以液压缸为动力源。采用两个液压缸为动力源的二级提升装置,各支撑板间通过导轨滑块进行连接,大大减少液压缸的行程,可使手术床提升范围相对一阶提升手术床增加200~300mm,对于提升过大的手术体位,通过一级提升带动二级液压缸同步运动,之后再通过二级液压缸进行二阶段提升,比较稳定,定位更精确,其内部结构更为紧凑。由于手术床为反复常用设备,二级提升能够增加单个液压缸的使用寿命,比一级提升更实用。因此在设计当中,考虑手术床需要更精确的位置以及高频率的使用,一阶提升在高频使用条件下和高行程的条件下,易出现使用寿命低的不足和位置不精确等问题。因此,选用二阶提升来弥补这些不足问题,降低行程,提高精度和使用寿命。其设计如图1 所示。
二级提升工作原理为:通过液压缸2 带动提升板4 和液压缸1 同步运动,其运动范围为0~300mm,如需要更大行程,则液压缸1 可后续带动提升板5 运动,实现二级提升。各提升板和支撑板间通过滑块导轨连接,实现各个提升运动。
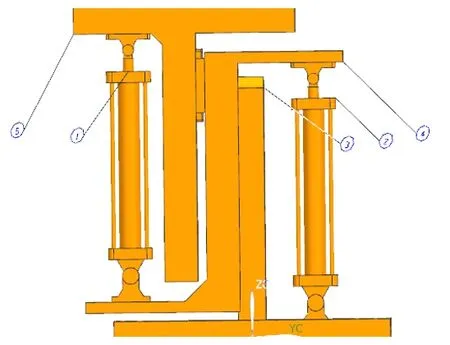
图1 二级提升装置(1、2 液压缸,3、4、5 支撑板)
图中二级提升大体结构为液压缸(1 和2),支撑板(3、4 和5)。若为一级提升其结构为液压缸2,支撑板(3 和4)即可,其中一级提升需要液压缸更大的行程,且对于手术床的床体的支撑重心在支撑板4 上,结构单一。而二级提升中增加了1和5 装置,在提升过程中,会产生重心的偏移,使得重心位置由支撑板4 上部转移到支撑板5 的下部,其重心位置比一级提升的重心位置低很多,由重心越低越稳定可得出,二级提升比一级提升更稳定。而且由图可以看出,结构1、5 和4 能构成三角形状,也能得出结构比一级提升更稳定。考虑到手术床在手术过程当中的精确性和稳定性,以及患者在手术中的移动、震动等因素,手术床体越稳定越能保证手术的成功,因此二级提升具有一定的优越性和合理性。在设计当中还要考虑到防污染等因素,对于导轨滑块的润滑可考虑脂润滑或者在润滑面贴上一层塑料,用来防止手术中油污等污染因素。在手术过程中患者往往会因为各种因素而产生便失禁等正常生理反应,因此在结构的设计中可以发现,二级提升比一级提升空出更多的有效利用位置(比如支撑板4 上部和支撑板5 的下部),不需要设计更多的有效利用位置,可以设计滑道等有效设施来处理尿袋排泄物收集装置,方便手术的进行,具有一定的可利用性。
支撑板3 的设计:支撑板3 起主要支撑作用,为了满足支撑板子使用要求,防止断裂,应该支撑板3 中加入筋板1 来提升强度,并利用导轨滑块与支撑板4 进行连接,板子上设计圆形孔用来固定导轨和连接滑块,材料选用45 钢,其设计如图2。
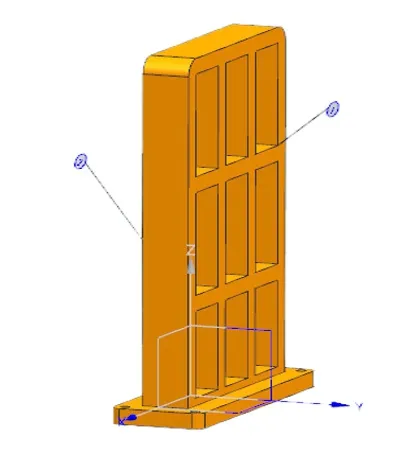
图2 支撑板3(1 筋板,2 支撑板面)
支撑板4 的设计:用来实现一级提升,并用来固定二级提升动力源,与支撑板3 和支撑板4 通过导轨滑块进行连接,其导轨轨道上方的槽设计为了便于导轨安装,由于平板的抗拉压强度过低,在设计中引入三角架等结构,材料选用45 钢,其设计图3 如下。
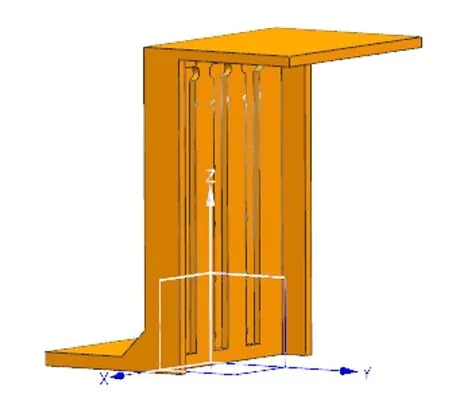
图3 支撑板4
2 液压控制系统设计
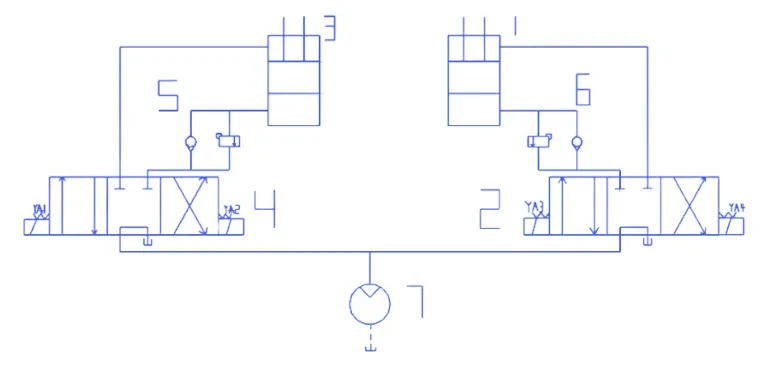
图4 液压回路设计
液压回路设计如图4,通过两个液压缸1 和3来控制手术床的上升和下降,1 缸用于一阶段的手术床提升下降,其用于普通手术体位;3 缸用于二阶段的手术床提升下降,其用于行程过高的手术体位。两个液压缸都选用三位六通换向阀(2 和4),并安装平衡阀(5 和6),平衡阀由单向阀和顺序阀组成,平衡阀使系统形成平衡回路,防止液压系统由于自重或受力过大而超速下降,或者用于平衡负载。(例如:平衡位置时腔内上下压力差不会过大,当人上去后,上腔压力大于下腔压力,若此时需要液压缸下降,会出现超速下降状态,添加平衡阀后由于顺序阀背压作用,会实现缓冲作用)。
其工作原理为,由图中可以看出液压缸3 当YA1 通电时,YA2 断电,换向阀左位连通,在液压泵的作用下液压油通过左位进入液压缸上腔,液压缸下腔油液通过平衡阀和换向阀左位回到油箱,实现液压缸的下降运动即回程运动;当图中YA2 通电,而YA1 断电,换向阀右位连通,在液压泵的作用下液压油通过换向阀右位和平衡阀中单向阀进入液压缸下腔,液压缸上腔油液通过油管和换向阀右位回到油箱中,实现液压缸的上升运动即提升运动;而当YA1 和YA2 同时断电时,电磁换向阀位于中间位置,液压泵直接接油箱,此时液压泵能实现卸荷,同时具有节能减压的功能。液压缸1 工作原理相同。
该液压系统采用电磁换向阀,能够使液压系统回路实现自动控制和循环动作,因此电磁换向阀中的电磁铁的通断与液压系统的各个动作,包括上行、回程等密切相关。那么,列写电磁铁的动作顺序表能更直观体现液压子系统的动作过程及工作原理,对于液压系统的设计、使用及维护都有指导性意义,因此,画出如表1 中电磁铁动作顺序表,其中“+”表示电磁铁通电,“-”表示电磁铁断电。
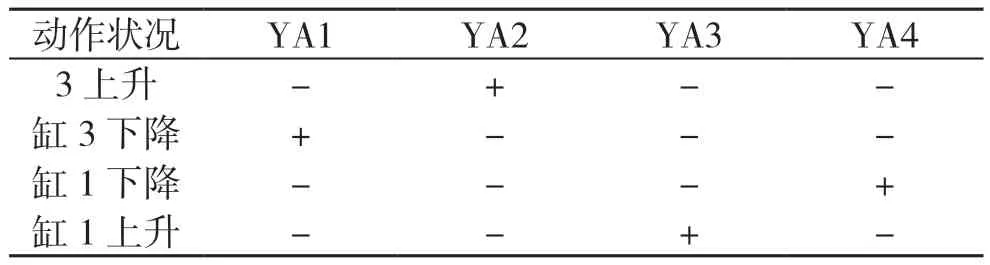
表1 得电顺序表
电磁铁的控制通过PLC 进行控制,用来实现手术床二级提升系统的上升下降,设计简单的控制程序及分配如表2 和图5。

表2 I/O 口地址分配
设计简单控制程序如下:
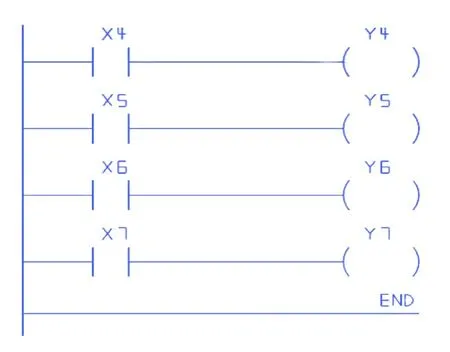
图5 PLC 控制程序
长按按钮SB1,Y4 得电电磁铁YA1 得电,缸3下降;长按按钮SB2,Y5 得电电磁铁YA2 得电,缸3 上升;长按按钮SB3,Y6 得电电磁铁YA3 得电,缸1 上升;长按按钮SB4,Y7 得电电磁铁YA4 得电,缸1 下降。
3 有限元分析
如上面设计可得出,支撑板4 存在受力危险截面,用来支撑液压缸及手术床上端其他装置,因此对其进行有限元分析,因为仅左端支撑端面受力,那么其他结构等效为固定端面,因此做出如下设计。打开UG 通过草图拉伸等命令画出等效图6。
图6 支撑板4 左端面
然后在应用模块进入到高级仿真,新建fem 和sim 文件,首先在i.prt 文件中对物体进行提升和分割面的命令,明确规划出压力的施加范围;然后返回fem 文件,进行3D 网格划分及材料的指定,其中所用材料为45 钢,那么直接选用steel 材料;最后进入sim 文件,在此文件中进行载荷的约束及固定截面的选定,其中固定截面为等效截面,求解后得到图7~图12 结果,在设置结果中得到应力-单元-节点的平均值如图10 所示。
图10 应力-节点图最大值为71.38MPa,其产生位移最大值为0.411mm。
4 结论
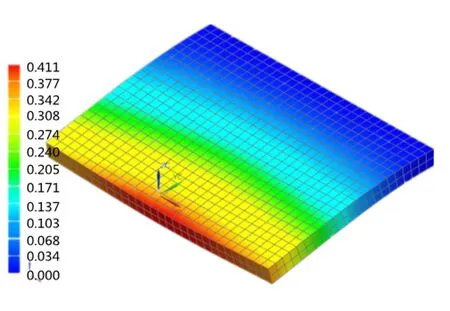
图7 位移-节点
图8 旋转-节点
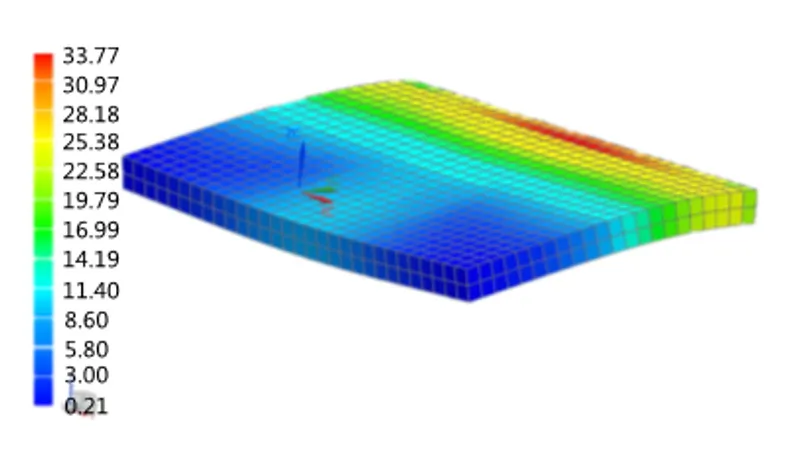
图9 应力-单元
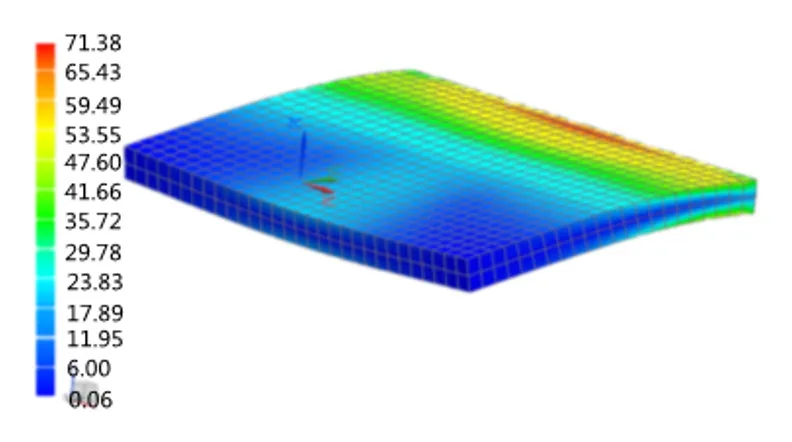
图10 应力-单元-节点
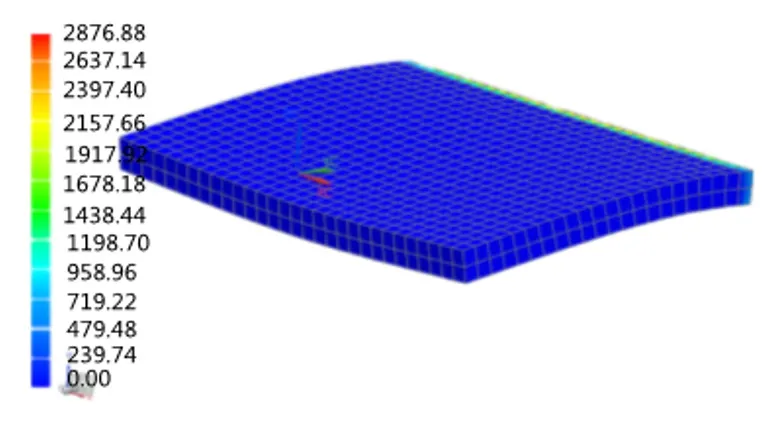
图11 反作用力-节点
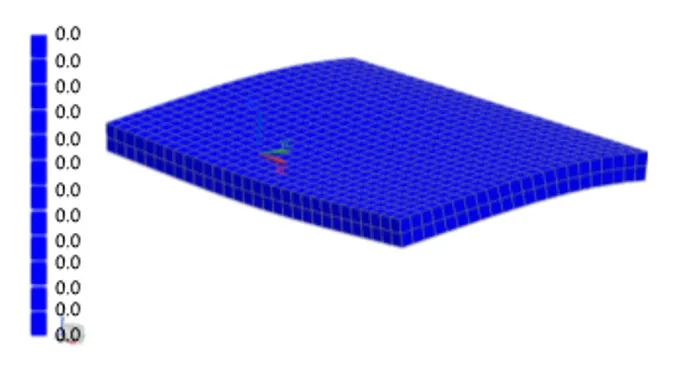
图12 反作用力矩-节点
根据有限元分析可得出,由于45 钢屈服强度为355MPa,而图10 应力-单元-节点图最大值为71.38MPa,图9 应力-单元图最大值为33.77MPa,远小于屈服强度,不会产生塑性变形,因此设计符合强度要求,根据位移-节点图7 可得出压力使支撑板产生位移最大值为0.411mm,根据旋转-节点图8 可以得出其旋转值为0 即不发生旋转,符合设计的强度弹性形变要求。而在结构的设计中,与传统的医院一级提升装置及手动提升医疗床及手术床进行对比,其中二级提升重心位置比一级提升的重心位置低很多,由重心越低越稳定可得出,二级提升比一级提升更稳定。设计中由于二级提升可出现类似三角形结构,以及手术床在手术过程当中的精确性和稳定性,考虑到患者在手术中的移动震动等因素,手术床体越稳定越能保证手术的成功性。因此,二级提升具有更好的优越性和合理性。二级提升比一级提升空出更多的有效利用位置,不需要设计更多的有效利用位置,可以设计滑道等有效设施来处理尿袋排泄物收集装置,方便手术的进行。液压系统能实现对电磁铁的得电控制,能实现二级提升运动,即设计符合手术床二级提升需求。