一种六氟化硫检测机械臂的设计与分析
2020-10-27陈梁远郭丽娟张玉波
陈梁远,郭丽娟,唐 彬,张玉波
(广西电网有限责任公司 电力科学研究院,南宁 530000)
高压断路器是高压电网的重要组成部分之一,其主要作用是切断和接通高压电路中的电流,吹灭开关电弧及降温,保证电网安全运行。六氟化硫(即SF6)是一种无味无色无毒的惰性气体,具有优异的冷却电弧特性,其绝缘特性远超传统的油、空气绝缘介质。以SF6气体作为灭弧介质的高压断路器开断能力强、体积小,电气寿命长,逐渐取代了传统的油断路器和压缩空气断路器,在110kV以上的断路器设备中占据主流地位[1-2]。SF6断路器本身也存在一定的缺点,在断路器开断电弧放电时,SF6会分解形成一定的有毒低氟化物,对绝缘材料和金属产生腐蚀作用,导致断路器密封性能下降,气压降低,含氧水量上升,严重影响断路器开断和灭弧性能,增加高压电网的安全风险。因此为保证SF6断路器长期安全有效运行,特别需要对断路器进行定期检测[3]。目前变电站中对SF6断路器密封处的检测多采用人工检测的方式,在断电后的待测断路器周围搭设脚手架,检测工人贴近断路器使用检漏仪或肥皂泡法对SF6断路器进行检测;此人工检测方式存在检测周期长、效率低、检测准确度低等问题;同时断路器中泄漏的有毒气体也对工人有潜在的毒性伤害。因此研制代替人工检测作业的SF6断路器带电检测机器人对高压电网的安全运行有重要意义。
检测机械臂是SF6断路器检测机器人对断路器检测的关键执行机构,工作空间和检测轨迹是影响其构型和设计的重要因素。本文通过基于随机概率的蒙特卡洛法[4-5]构建检测机械臂的工作空间,对检测机械臂构型进行分析和筛选;通过五次多项式插值法[6-7]对任务检测曲线进行轨迹规划,既能保证机器臂末端轨迹的速度与加速度曲线连续,又能避免产生过大的振动。最后根据设计仿真结果完成检测机械臂的结构设计和组装,在现场实验中验证检测机械臂对SF6断路器的检测性能。
1 SF6泄漏检测机械臂构型分析
图1为220kV变电站SF6断路器工作环境。通过图1可以看出,在220kV变电站中的SF6断路器工作区域环境复杂,工作空间狭小,环境约束众多,因此需要在实际工作环境和检测流程的约束下针对性地对检测机器人进行结构设计。220kV变电站所采用的SF6断路器一般通过绝缘子瓷瓶放置于3m的水泥安装架上,断路器安装高度为7m。相邻的断路器之间距离为4m,同时为防止在高电压下设备产生相间放电,断路器间存在导电体的最小安全距离为2.5m。

图1 220kV变电站SF6断路器工作环境
通过对待检目标SF6断路器分析,断路器SF6泄漏点即检测机器人的目标检测点,主要存在于法兰连接位置、断路器罐体焊缝位置及法兰连接螺栓处。检测目标区域为沿地面垂直的中空圆柱形区域,如图2所示。

图2 SF6断路器气体泄漏检测目标区域
针对SF6断路器的检测环境和检测目标所提出检测机器人方案由移动平台、绝缘升降梯和检测机械臂三个部分组成,如图3所示。

图3 SF6断路器气体泄漏检测机器人设计方案
检测机械臂通过移动平台和绝缘升降梯移动至待检断路器附近,其末端携带SF6检漏仪吸气管沿断路器目标检测点进行检测。检测机械臂是检测机器人方案中的关键机构,在满足对SF6断路器检测工作空间的基础上,要求轻量化和结构紧凑化设计。
综上所述,本文提出四种检测机械臂的机构构型[8-11],如图4所示,以检测机械臂基座与被测断路器中心距离700mm、待测断路器罐体圆截面的直径400mm为约束条件进行尺寸综合。

图4 SF6气体泄漏检测机器人检测机械臂构型
本文采用几何法对SF6断路器检测机器人的检测机械臂进行尺寸综合,如图5所示。
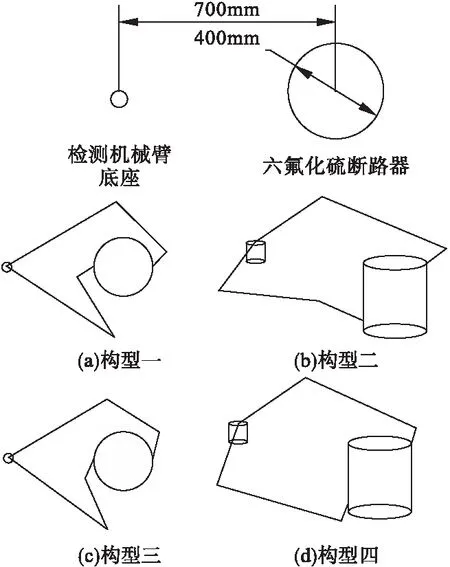
图5 SF6气体泄漏检测机器人检测机械臂尺寸综合
通过图5中尺寸分析可知,当检测机器人的升降云梯将检测机械臂升到固定高度的位置时,检测机械臂构型二和构型四无法完成对断路器平面内一个圆周的检测流程,因此选择构型一和构型三作为检测机械臂的结构构型。通过计算,可得到检测机械臂的尺寸参数,第一节机械臂连杆长度为792mm,第二节机械臂连杆长度为730mm,机械臂末端检漏仪吸气管偏置距离为200mm。
2 检测机械臂运动学分析
2.1 检测机械臂运动学建模
机械臂末端工作空间代表机器人机械臂的活动范围,是机器人运动灵活性的重要指标。运动学建模是检测机械臂末端执行器(即SF6检测设备)位置和姿态与各关节变量之间的关系,是机械臂工作空间的研究基础。SF6断路器检测机械臂末端的运动范围需要覆盖检测机械臂前方断路器罐体所在的一个圆柱形区域。
SF6断路器检测机械臂的两个构型均由三个旋转关节组成,存在三个自由度。根据检测流程,检测机械臂的作业目标在检测机器人正前方,如表1所示,建立三个关节转动角度约束。按照D-H参数法在检测机械臂上建立关节坐标系[4],如图4中构型一和构型三所展示的坐标系。

表1 检测机械臂各关节转角范围
工具坐标系建立在检测仪器末端,建立构型一和构型三的D-H参数,如表2、表3所示。其中α1,i-1、a1, i-1、d1,i、θ1,i为构型1的关节i的关节D-H参数[8],α3,i-1、a3,i-1、d3,i、θ3,i为构型3的关节i的关节D-H参数[8]。

表2 构型一连杆D-H参数表

表3 构型三连杆D-H参数表
通过已知的两个构型的D-H参数建立检测机械臂的正运动学变换矩阵,即已知各关节角度求解末端执行器工具点相对于机械臂基坐标系的位置关系。式(1)和式(2)为构型一的检测机械臂正运动学变换矩阵。
(1)
(2)
式(3)和式(4)为构型三的检测机械臂正运动学变换矩阵。
(3)
(4)
P为末端检测仪器端点相对检测机械臂底座中心坐标的位置向量。
2.2 机械臂的工作空间分析
用蒙特卡洛法对两种构型检测机械臂的工作空间进行计算,可得到该检测机械臂的工作空间形状如图6所示[12-14]。
从图6b的工作空间中可以看出,构型三的工作空间不能将目标位置的SF6断路器包容在内。与构型三相比,构型一工作空间无空腔,范围大,很好的包围了目标范围。因此最终选择构型一作为SF6断路器检测机械臂的结构构型。


图6 检测机械臂工作空间
3 轨迹规划与仿真
在对SF6断路器检测过程中,检测机械臂末端贴近断路器罐体后沿一侧绕罐体进行检测,检测到最远点后返回初始点,继续沿另一侧进行检测,实现对断路器整体圆周的检测流程。针对检测机械臂的检测过程,规划和仿真检测机械臂对断路器进行检测时的检测轨迹,以保证机械臂末端能够以20mm/s的速度稳定沿断路器进行检测。
考虑到机械臂的实际运动路线,同时目标220kV SF6断路器位于距离检测机械臂关节1轴向700mm、半径200mm的圆形区域,因此规划检测机械臂的检测轨迹为沿检测机械臂关节1与断路器罐体中轴线向断路器移动,贴近断路器后沿断路器圆形区域半圆形轨迹移动,以检测机械臂在检测轨迹中速度稳定平稳为目标。设定在检测工作平面内,机械臂末端检测工具点在启动时以一个稳定的加速度进行加速,当末端检测工具点达到20mm/s后,沿断路器罐体进行检测,到达终点时以同样的加速度进行减速运动,在终点处停止运动。末端速度变化如图7所示。通过检测机械臂逆运动学方程将运动轨迹路径点转换为关节角度值,然后分别对每一个关节变量映射成一个五次多项式插值[15-16]光滑时间函数,使之从起始点开始,一次通过所有路径点,最后达到目标点。

图7 SF6检测管工具末端速度曲线
检测机械臂为三自由度机械臂,则末端点的位置向量可设为
(5)
(6)
通过式(1)、式(5)和式(6)可解出构型一的检测机械臂运动学逆解。
θ12=θ11+θ12-θ11
(7)
式中:
k1=px2+py2+a1T2cosθ13+d132-a112+
2pxa1Tcosθ13+2pyd13
k2=-4pya1Tcosθ13-4pxd13
k3=px2+py2+a1T2cosθ13+d132-a112-
2pxa1Tcosθ13-2pyd13
通过五次多项式插值仿真,可以得到机械臂从圆弧一侧端点移动到另一侧端点中各个关节角速度、角加速度与时间关系,如图8所示。通过仿真结果可以发现,在保持末端工具点速度稳定的基础上,各关节转动稳定,角速度变化平稳,无突变,角加速度在检测时间段保持稳定,无冲击,证明在检测轨迹中检测机械臂运行稳定。


图8 各关节角速度与角加速度随时间变化趋势
4 实验
根据检测机械臂的仿真结果,采用构型一作为检测机械臂的构型并完成结构设计。所研制的机械臂已通过由电力工业带电作业工器具质量检验测试中心开展的绝缘第三方测试,并通过了在高压试验大厅和供电局实训基地进行的模拟现场带电测试和实际现场带电测试。测试结果表明,本文设计的检测机械臂完全能够准确有效地对SF6断路器罐体周边开展气体泄漏带电检测。实验如图9所示。


图9 SF6断路器气体泄漏检测机器人检测机械臂现场实验
5 结束语
通过分析220kV变电站SF6断路器的检测任务和检测环境,提出了针对断路器周边狭小受约束环境的检测机器人设计方法。结合小型轻量化的设计需求和实际检测任务,通过尺寸综合和工作空间分析,研究了四种三自由度检测机械臂构型方案的分析比较,实现了检测机械臂构型设计及连杆尺寸优化。分别采用仿真和实验方法开展设计验证,结果表明本文设计的检测机械臂在检测中运行平稳、无冲击,证明检测机械臂性能稳定,能够在狭小受约束检测环境中可靠的完成对SF6断路器的检测任务。
