半潜式支持平台系泊系统的设计方法及应用
2020-10-24单铁兵
单铁兵
(中国船舶及海洋工程设计研究院,上海 200011)
半潜式支持平台专门为半潜式钻井平台、海上浮式储卸油装置(FPSO)、张力腿平台(TLP)、立柱式平台(SPAR)以及半潜式生产平台等海上油气勘探、处理平台提供人员居住、娱乐、物资补给和工程辅助等作业支持,不仅可为平台上工作人员提供一个舒适的居住坏境,在紧急情况下还能作为紧急避难场所以保证人员安全。
半潜式支持平台配有液压可伸缩式人行栈桥系统,开展人员输送任务时,半潜式支持平台通常通过自带的系泊系统或动力定位系统旁靠于油气勘探处理平台一侧,并通过水平缆绳将两平台绑扎连接,随后将栈桥伸向目标平台,如图1所示,配合波浪升沉补偿系统,尽可能维持两个平台之间垂荡方向的相对静止,保障了人员在栈桥上通行的安全,待人员输送完毕后,半潜式支持平台视天气情况将栈桥收回、水平连接缆绳解脱,半潜式支持平台仅依靠自身的系泊系统或动力定位系统抵御海上恶劣的环境。

图1 半潜式支持平台与目标平台的靠泊作业Fig. 1 Semi-submersible support platform side-by-side operation with target platform
半潜式支持平台被誉为海上浮动酒店,相比于普通海上作业船只,优良的稳定性、节能环保、舒适性、运动性能、人员输送的安全性以及自身的海上定位能力是平台设计的重要关注方向。
目前,国内外学者均有针对半潜式支持平台的理论和试验研究。杨忠华[1]对半潜式起重生活平台的总体设计技术进行了研究,包括布局规划规则、船型方案、振动噪声控制及推进器优化布置等,以实现较优的定位性能,舒适的居住条件为目标进行平台总布置优化。赵静等[2]采用水动力分析软件SESAM研究了半潜式生活支持平台水动力性能,分析了平台6自由度的响应和纵荡、横荡、垂荡方向的加速度。Gu等[3]采用FLUENT软件对半潜式钻井支持平台不同风谱下的随机风载荷特性进行了理论分析。王月等[4]采用水动力软件AQWA计算了半潜式钻井支持平台在迎浪、斜浪和横浪角度下的运动和系泊缆受力情况,研究表明,该系泊系统满足规范要求。范亚丽等[5]对系泊系统完整、单缆破断和附加水平刚度等不同系泊模式下的半潜式支持平台的定位性能开展了模型试验研究,获得了平台运动、系泊缆张力,并对系泊缆的安全系数、平台的最大偏移进行了分析,其结果为平台系泊模式的安全性评估和优化设计提供了技术支持。张伟[6]采用时域动态分析方法对半潜式支持平台锚泊辅助动力定位系统进行了详细研究,针对外部环境条件,风载荷和流载荷采用经验公式计算,波浪载荷采用面元法进行估算,基于悬链线理论模拟系泊系统,并与仅有系泊定位系统进行对比分析。
针对半潜式支持平台的系泊系统开展设计方法和分析流程的系统研究,阐述该平台系泊系统配置和布置设计,同时给出了风浪流载荷的估算方法以及系泊系统设计的规范衡准。将上述设计方法和流程应用于某型半潜式支持平台系泊系统的设计,采用系泊定位分析程序MIMOSA对该系统的定位能力进行分析,按照船级社的规范要求对相应的结果进行衡准,同时考虑设计紧凑、经济性良好的思路,反复调整和优化系泊系统的配置和布置方式,最终设计出较合适的系泊系统。数值分析结果表明:无论是系泊完整工况还是破断工况,该系泊系统的张力均满足规范要求,从而确定了系统的最终配置和布置方案,相关方法和结论为实际工程项目提供重要的设计思路。
1 系泊系统的组成及布置方式
系泊系统是限制海上浮式结构物漂移的重要设备,半潜式平台的系泊系统一般由定位绞车、导缆器、系泊缆以及定位锚组成,如图2所示。
锚泊系统设计前期,为了节省成本,系泊缆往往首选常规和简单的型式,例如,对于半潜式支持平台之类的移动式系泊系统,根据水深、定位能力以及方便收放缆绳等方面考虑,系泊缆通常选用如下组合方式:整根系泊缆均为钢丝绳;整根系泊缆均为锚链;整根系泊缆由顶端钢丝绳和底端锚链组成。
同时,钢丝绳通常参照海洋工程系泊用钢丝绳国家标准GB/T33364-2016,主要包含6股钢丝绳、单股钢丝绳和全密封钢丝绳3大类型,公称直径分布范围为52~160 mm。锚链则参照电焊锚链国家标准GB/T 549-2008,主要包括一级、二级和三级有档锚链或无档锚链,其中有档锚链的公称直径分布范围为11~162 mm,无档锚链的公称直径分布范围为6~50 mm。
若缆绳张力超过了规范允许的安全值或国家标准中的可选范围,通过如下方式可以提高系泊系统整体的抗风浪能力:
1) 钢丝绳选用高强度材质或螺旋股的插接方式可大大提高其轴向刚度;
2) 锚链选用高强度的材质,比如R3、R3S、R4、R4S以及R5级等高规格的海工锚链,可提高系泊缆的破断负荷,同时还具有耐海水腐蚀和防磨的效果,避免钢丝绳与海床发生摩擦而导致寿命大幅降低的不利特点。
基于上述思路,该半潜式支持平台的系泊系统初步定为多点系泊方式,呈现辐射状布置。

图2 半潜式平台系泊定位系统Fig. 2 Positioning mooring system of semi-submersible platform
2 锚泊系统的设计方法和流程
锚泊系统的设计流程主要分为三大部分,按照顺序依次开展系泊系统的选型设计、水动力计算以及系泊定位分析。
系泊系统选型设计的主要目的为确定系泊系统的初步配置、布置,是系泊定位分析的基础,包括:
1) 系泊绞车和导缆器等的形式、规格与安全工作负荷;
2) 定位锚的类型、尺度以及最大抓力等;
3) 单根系泊缆组份、材质、刚度、直径、破断负荷等,系泊缆的数量、抛出长度、各系泊缆水平方向的夹角以及系泊绞车、导缆器和定位锚的布置位置。
半潜式支持平台水动力计算主要目的为确定主要包括波浪作用下的平台运动和受力、平台风载荷、流载荷分析:
1) 波浪作用下的平台运动和受力。首先根据半潜式支持平台的总布置图及型线图,建立湿表面模型;随后,输入平台重力、重心、惯性半径等平台固有参数,水深、波浪的频率和角度范围等外部环境参数;最后,采用基于理想流体假设的势流理论开展平台辐射和绕射计算,获得平台运动和一阶波浪力的幅值响应算子(RAO),附加质量、阻尼以及二阶波浪慢漂载荷。
2) 平台风载荷。计算平台水面以上的受风面积,同时需考虑高度系数和形状系数对该面积的贡献;基于API及船级社规范推荐的估算方法分别对平台艏向、侧向所受的风载荷进行计算;基于规范推荐的斜向风力计算公式预报各斜向的风载荷。
3) 平台流载荷。计算平台水面以下的投影面积;基于API估算方法分别对平台艏向、侧向所受的流载荷进行计算。
在完成半潜式支持平台的系泊系统初步选型设计和水动力性能计算之后,方可开展系泊定位分析,具体包括:
1) 输入导缆孔、锚点的位置,系泊缆参数,预张力等初步参数,分析系泊系统的刚度特征,即系泊系统的水平回复力与偏移之间的关系。
2) 输入设计环境条件,根据风载荷、流载荷系数确定该海况作用下,平台所受的稳态环境力。
3) 通过系泊定位分析程序或软件,计算对应海况下,平台的平均、波频和低频偏移,各系泊缆上的平均、波频和低频张力,各系泊缆锚端的张力、缆绳躺底长度等参数。
4) 按照规范要求,对上述计算结果进行衡准来判断该系泊系统是否满足要求,若各项指标满足要求,设计结束,若未满足要求,需返回系泊系统选型设计环节,对其配置或布置进行调整。锚泊系统的具体设计流程如图3所示。

图3 半潜式支持平台系泊系统的设计流程Fig. 3 Design chart of mooring system for semi-submersible support platform
3 水动力性能的计算方法
3.1 风载荷的估算方法
在没有风洞试验资料的情况下, 半潜式支持平台艏向和侧向风载荷的计算一般采用如下的经验公式:

(1)
式中:Cs为形状系数;Ch为高度系数[7-9];Ai为每个受风面的垂向投影面积,m2;Vw是设计风速,m/s,为海平面以上10 m处的平均风速。
半潜式支持平台的风载荷投影面积应包含所有的立柱、甲板室、桁架结构、吊机等,并考虑形状系数和高度系数的影响。API、ABS船级社、CCS船级社等规范均对相关系数有相关指导说明。
斜向的风力可通过分别计算艏向和侧向风力,按下述方法合成:

(2)
式中:Fφ为斜向风力,N;Fx为艏向风力,N;Fy为侧向风力,N;φ为风力方向相对于船艏方向的角度,(°)。
按照半潜式支持平台水线以上的形状,分别估算不同组块的投影面积,如图4所示,并考虑高度系数和形状系数的影响,对组块修正后的面积求和,获得其正向、侧向的投影面积分别为2 598 m2和3 118 m2。
当计算出各个方向的风力之后,即可得到用于系泊定位分析所需的风力系数,在MIMOSA软件中,风载荷系数通过如下公式计算:

(3)

(4)
式中:Fxw为风力艏向分量,N;Fyw为风力侧向分量,N;Cwind-x为艏向风力系数,N·s2/m2;Cwind-y为侧向风力系数,N·s2/m2,沿正向和侧向的风力系数随角度的变化如图5所示。
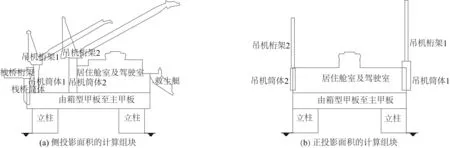
图4 半潜式支持平台各向受风面积的计算组块Fig. 4 Components of wind projected area for semi-submersible support platform

图5 半潜式支持平台风力系数Fig. 5 Wind force coefficients for semi-submersible support platform
3.2 流载荷的估算方法
根据API规范,诸如半潜式支持平台之类的四立柱平台,其艏艉向和侧向海流力可按照如下公式估算得出:

(5)
式中:Ccs为半潜式平台海流力系数,其值为515.62 N·s2/m4;Cd为拖曳力系数,选取原则参见图6;Ac为所有水下圆柱形构件投影面积之和,m2;Af为所有水下构件投影面积之和,m2,平台正向和侧向受流面积的计算组块如图7所示;Vc为设计流速,m/s。
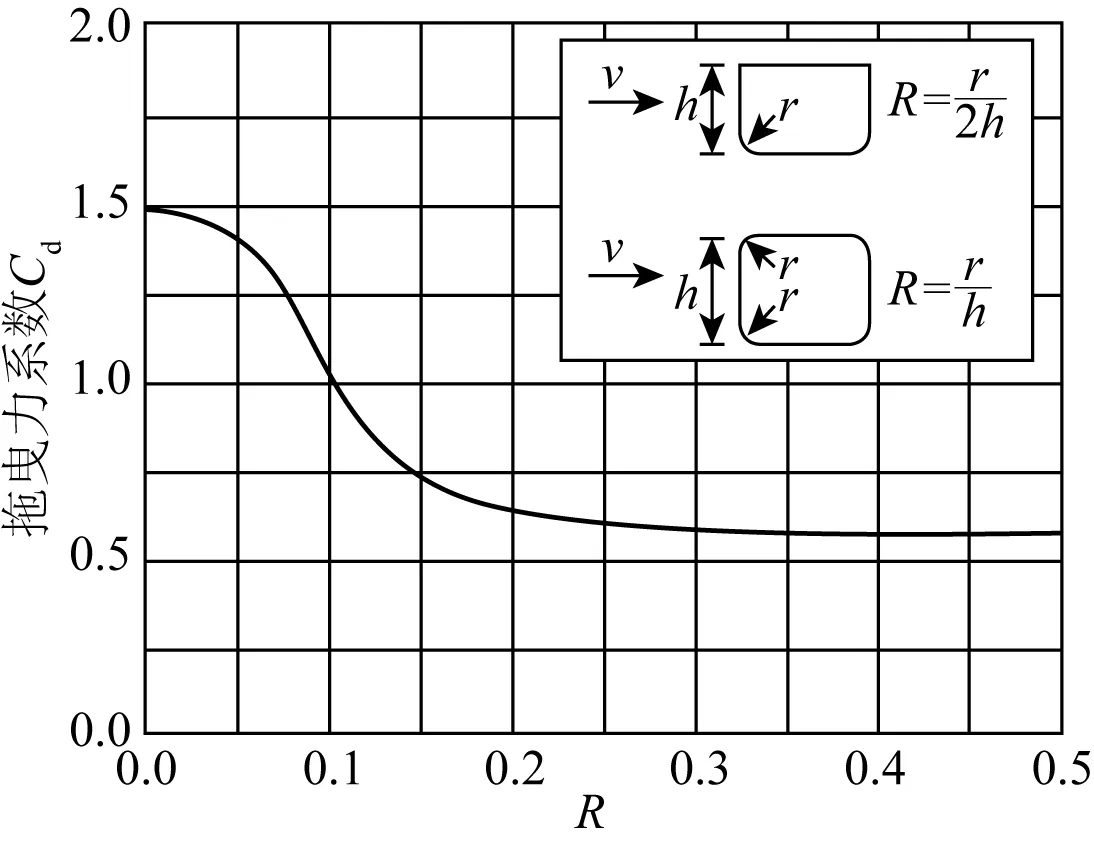
图6 半潜式平台的拖曳力系数Cd随倒角率R的变化Fig. 6 Drag coefficient Cd of semi-submersible platform varies with the chamfer rate R

图7 半潜式支持平台各向受流面积的计算组块Fig. 7 Components of current projected area for semi-submersible support platform
在MIMOSA软件中,流载荷通过如下公式计算:

(6)

(7)
式中:Fxc为各个方向流力艏向分量;Fyc为各个方向流力侧向分量;Ccurr-x为各个方向的艏向流力系数;Ccurr-y为各个方向的侧向流力系数。
半潜式支持平台的流力系数随流向的变化分布如图8所示。
3.3 波浪载荷的分析方法
平台6自由度运动[10]可表示为:

(8)
在计算半潜式支持平台的水动力性能时,遭遇浪向为0°~360°,中间间隔15°,频率为0.02~2.0 rad/s,中间间隔0.02 rad/s。根据平台型线建立的面元模型如图9所示。

图8 半潜式支持平台流力系数 Fig. 8 Current force coefficients for semi-submersible support platform

图9 半潜式支持平台的网格模型Fig. 9 Panel model of semi-submersible support platform
基于上述求解方法,可获得该平台垂荡、横摇和纵摇三个波频方向的运动响应RAO,图10为垂荡运动RAO,即单位波浪幅值作用下,平台垂荡运动随波浪频率的变化曲线。
假设平台的波频运动响应服从窄带高斯定理,则其响应峰值满足瑞利分布[11-12],基于波频运动RAO曲线,可根据式(9)计算平台的波频运动响应谱:

(9)
运动标准差表示为:

(10)
由此,在3小时内,平台波频运动可能发生的最大值表示为:

(11)
其中,NiWF为过零周期的数量。
基于平台的波频运动响应,通过频域计算方法可获得系泊系统的波频张力。
虽然平台所受的低频载荷往往比波频力小几个量级,但由于系泊系统具有典型的低频运动特点,与波浪的低频载荷相互作用时,容易发生共振现象,导致系泊缆的张力和平台的偏移急剧增加,因此,二阶波浪慢漂载荷的预报对系泊系统设计具有重要的作用,是最关键的参数之一。目前,二阶波浪漂移载荷的计算方法主要包括:远场积分方法、中场积分方法以及近场积分方法,文中采用的是远场积分方法。
远场积分法根据动量守恒定律,通过在远方控制面上积分,得到平台纵荡、横荡和垂荡三个方向上的平均二阶力,其计算公式为:

(12)

(13)

(14)
其中,Cg为波浪的群速度;C为波速;α为波浪入射角;A(θ)为绕射势在远场的幅值。
平台纵荡方向的二阶波浪慢漂力传递函数如图11所示,为单位波浪幅值作用下,平台纵荡方向的波浪慢漂载荷随波浪频率的变化曲线,该慢漂载荷的大小与入射角度有关,同时随波浪频率的变化而呈现振荡特征。

图10 平台运动RAO (垂荡)Fig. 10 Motion RAO of platform (Heave)

图11 平台二阶波浪慢漂力的传递函数(纵向)Fig. 11 Transfer function of 2-order wave drift force (Surge)
4 锚泊系统设计的规范衡准
该半潜式支持平台属移动式平台,一般而言,该类平台系泊系统的设计规范参考API RP 2SK(美国石油协会)、ABS船级社以及CCS船级社等规范[7-9]。
安全系数是指锚索破断强度与所受最大张力之比,是衡量系泊系统设计能否满足要求的关键指标,锚索的安全系数取决于设计工况及所采用的锚泊分析方法。API RP 2SK和CCS规范均根据锚索的状态、不同设计工况和锚索张力的计算方法对锚索的最大张力安全系数做了规定,如表1所示。
缆绳张力的安全系数F规定为:
(15)
式中:FMBL为锚索的最小破断强度,kN;TMAX为锚索的最大张力,kN。
当采用动态分析法时,锚索张力的安全系数应不小于表1的规定值。

表1 张力限制和安全系数Tab. 1 Tension limit and safety factor
此外,对于各种有杆锚、海军锚、无杆转爪锚以及大抓力锚等阻力式锚,其在土壤中的抓持力表现为锚能沿水平方向持续提供的最大抓力,按照API规范,定位锚应满足表2所示的衡准要求。

表2 阻力式锚的安全系数Tab. 2 Drag anchor safety factor
定位锚的安全系数F规定为:
(16)
式中:FAhc为定位锚能够提供的抓持力,kN;TAmal为锚端所受的最大水平力,kN。
5 平台系泊系统设计的应用分析
按照上述的流程和方法依次开展系泊系统初步选型、水动力性能计算以及系泊定位分析,其中,采用DNV船级社开发的HYDROD软件对半潜式支持平台的水动力性能进行计算,采用基于动态方法的MIMOSA软件对系泊系统的定位能力进行分析,根据船级社的规范要求对相应的结果进行衡准,对系泊系统的配置和布置方式进行反复的调整和优化,直至系泊系统满足要求,按此思路,可设计出较合适的系泊系统。
5.1 环境条件
半潜式支持平台的船体总长约103 m,型宽为70 m,型深为38 m,平台的设计吃水为15.75 m,重心高度相对基线约为19.8 m,绕x、y及z方向的惯性半径分别为28 m、32 m和36 m。
该支持平台的服役海域为北海,采用10年一遇的回归周期,有效波高为14.4 m,谱峰周期为17.0 m,设计风速34.9 m/s,流速为0.96 m/s。

图12 平台辐射状系泊系统Fig. 12 Spreading mooring system of floating structure
系泊系统的设计工况为:波浪的频谱形式为JONSWAP谱,形状参数为2.0;选用非定常风,其频谱形式为NPD谱;选用定常流;风、浪和流假定为同向作用于该支持平台,计算更为保守。
5.2 锚泊系统的布置和配置参数
半潜式支持平台系泊定位作业时共有12根锚索,分为4组,每组3根。定位锚索的编号从1~12变化,每组中每根锚索与中纵线的夹角分别为5°;1~6号系泊缆与7~12号系泊缆沿中纵剖面对称,1号系泊缆与x轴方向的夹角为40°,如图12所示。
半潜式支持平台的每一根系泊缆由顶端钢丝绳与底端锚链两部分组成,具体系泊缆的参数见表3。

表3 系泊缆的属性参数Tab. 3 Parameters of mooring lines
1~12号系泊缆抛出长度为4 300 m,其中钢丝绳的抛出长度为3 900 m,400 m的锚链全部抛出,各缆绳的预张力均选为730 kN。
5.3 分析结果
根据上述系泊系统的配置和布置方案,基于频域动态分析方法,采用MIMOSA软件对目标半潜式支持平台开展系泊定位分析,获得不同的浪向下,完整工况、单缆破断工况下,半潜式支持平台运动的最大偏移、锚索顶端导缆孔处的最大张力以及锚端的最大张力。
表4和图13显示的是北海10年一遇海况条件下,完整和一根缆破损工况下,半潜式支持平台的最大偏移和导缆孔处的最大张力等结果。
分析可知:
1) 完整工况下,系泊缆顶端的最大张力发生在外载荷方向为30°时,缆绳编号为7号系泊缆,安全系数为2.02,满足规范1.67的要求;锚端的最大张力也发生在7号,锚端的最大张力为3 100 kN;任何角度下,缆绳均有躺底,最小躺底长度为19 m,说明在任何情况下,系泊缆绳的锚端不会出现上拔力,规避了定位锚被垂向拔出而丧失抓力的风险,满足规范要求。
2) 破断工况下,系泊缆的最大张力同样发生在风浪流角度为30°时,缆绳编号为7号系泊缆,安全系数为1.53,满足规范1.25的要求;破断的缆绳编号为8号,锚端的最大张力为4 300 kN。
3) 通过比较易知,破断工况下,无论是缆绳的张力还是平台的偏移,均比完整工况大;但结果的变化规律基本类似,即最大偏移和张力均发生在同一风浪流角度,锚端的最大张力均比顶端所受的张力小。

表4 系泊定位分析结果Tab. 4 Analysis results of mooring system

图13 完整和单缆破断工况下,顶端和锚端的最大张力随环境角度变化的玫瑰图Fig. 13 Rose diagram of the maximum tension at the top and anchor point according to the environmental directions under intact and single line breaking conditions
计算结果表明,两种工况下,平台系泊系统的各项参数均能满足规范的要求;另一方面,无论是缆绳的张力还是躺底长度均富余较小,系泊系统的设计紧凑,经济性较好;虽然平台的偏移较大,但并非平台在生存工况下的衡准指标。
图14(a)为完整与破断工况下,顶端张力最大时,系泊缆形状、缆绳与水平夹角随水深的变化特点,从图中可以看出,由于重力的作用,系泊缆形状呈现悬链线特征,完整工况下,底部锚链尚有部分躺底,而破断工况下,由于顶端张力更大,系泊缆被拉紧,图中可以明显看出,张紧后系泊缆的弧度变小。
图14(b)显示的是最大张力作用下,缆绳与垂直方向的夹角随水深的变化特点。从中可以看出,无论是完整还是破断工况,该夹角均随水平距离的增加呈现先趋于线性增大,随后在钢丝绳与锚链连接处出现突变,同时夹角增加速度更明显的特征,这是因为锚链比钢丝绳更重,更不容易被拉起。

图14 最大张力作用下,系泊缆形状、缆绳与垂直方向的夹角随水深的变化特征Fig. 14 Shape of mooring line, angle between mooring line and vertical direction vary respectively with the water depth under maximum tension
5.4 系泊系统的最终配置
基于系泊定位分析的结果,该半潜式支持平台采用12点锚泊系统进行定位;系泊绞车布置于平台主甲板的左右舷四角隅附近,绞车实现系泊缆的收放及刹车定位;导链器安装于平台立柱侧面,其功能为将系泊缆沿立柱表面垂直往下布置,导缆器一般位于平台作业水线下方,以避免供应船与平台旁靠补给过程中与系泊缆发生剐蹭,同时还可沿轴向旋转以满足不同抛锚角度的需求;配置12个定位锚,定位锚楔入泥土提供抓持力;设计可供3个定位锚同时摆放布置的锚架,系泊系统从海上回收时,定位锚固定于锚架之上。
同时,由上述计算结果可知,该支持平台的最大锚端张力约为4 300 kN,根据规范对移动式系泊系统锚端安全系数的要求,最终选择重量为8 t,最大抓持力可达500 t的Stevpris大抓力锚作为该平台的定位锚,具体如图15所示。

图15 半潜式支持平台的系泊系统布置Fig. 15 Mooring system layout of semi-submersible support platform
6 结 语
对半潜式支持平台系泊系统的设计方法和流程进行系统研究,并应用于某型半潜式支持平台系泊系统的开发和设计,可获得如下结论:
1) 波浪慢漂载荷是对平台系泊系统的定位能力影响较大的参数之一,该载荷的大小与入射角度有关,同时随波浪频率的变化而呈现振荡特征。
2) 无论是完整工况还是破断工况,平台的最大偏移和缆绳的最大张力均发生在同一风浪流角度;相比完整工况,在单根缆绳破断条件下,无论是缆绳的张力还是平台的偏移均显著增加,对平台安全性构成一定威胁,是设计中需要重点关注的内容。
3) 系泊缆的形状与张力关系密切,在重力的作用下,系泊缆形状呈现悬链线特征,相比完整工况,因破断工况下的顶端张力更大,缆绳被拉紧,张紧后系泊缆的弧度变小,底端锚需提供更大的抓持力。此外,缆绳与垂直方向的夹角随水平距离的增加将呈现先线性增大,随后在钢丝绳与锚链连接处出现突变,同时夹角增加速度更明显的特征。
4) 系泊缆张力和锚端躺底段长度是考核系泊系统能否满足安全性要求、系统设计是否合理经济的主要指标。基于上述设计方法,该半潜式支持平台系泊系统的相关参数均满足规范要求。此外,无论是缆绳的张力还是躺底长度均富余较小,系泊系统的设计紧凑,经济性较好。
相关设计方法、流程和结论可用于实际工程项目中系泊系统的研发,并提供重要的设计思路。
