船舶靠泊过程中系缆作业仿真
2019-12-30代广树
摘要:
為更加准确直观地模拟船舶靠泊过程中的系缆作业,将缆绳分为两部分进行建模。对缆机滚筒上的缆绳提出缠绕算法模型,计算出缆绳随着滚筒旋转的收放速度,实现使用滚筒收放缆绳的模拟。对缆机滚筒外的缆绳建立悬链线模型,计算出缆绳在不同工况下的形状和端点处的受力情况,并根据计算出的缆绳张力是否超出安全负荷对缆绳进行破断分析。根据船舶和码头形状确定碰撞检测区域,采用基于距离场的碰撞检测方法实现缆绳与船体、缆绳与码头之间的碰撞检测。通过模拟缆绳在系缆作业过程中的形状、位置和姿态变化,实现船舶靠泊过程中系缆作业的三维可视化。
关键词:
靠离泊; 缆绳; 系缆作业; 悬链线
中图分类号:U675.95
文献标志码:A
Simulation on tethering operation in process of ship berthing
DAI Guangshu
(
Maritime Technology Department, Tianjin Maritime College, Tianjin 300350, China)
Abstract:
In order to simulate the tethering operation in the process of ship berthing more accurately and intuitively, the cable is divided into two parts for modeling. The winding algorithm model for the cable on the winch drum is established, and the cable retraction speed with the winch drum rotation is calculated to realize the cable retraction simulation on the drum. For the cable outside the winch drum, the catenary model is established, the shape and the stress at the cable end under different conditions are calculated, and the breaking analysis of the cable is carried out according to whether the cable tension exceeds the safety load. The collision detection area is determined according to the shapes of ships and wharves. The collision detections between the cable and the hull and between the cable and the wharf are carried out by the distance field-based collision detection method. Through the simulation of the cable shape, position and attitude changein the tethering operation, the three-dimensional visualization of the tethering operation in the process of ship berthing is realized.
Key words:
berthing and unberthing; cable; tethering operation; catenary
收稿日期: 2019-01-02
修回日期: 2019-08-19
作者简介:
代广树(1978—),男,天津人,讲师,硕士,研究方向为交通运输工程与控制,(E-mail)daiguangshu1978@hotmail.com
0 引 言
系缆作业是船舶靠泊操纵作业的重要组成部分。一般来说,船舶靠泊过程中系缆作业包括备缆、出缆、松缆、上桩、收缆、挽缆、调整,直至最后挽牢。在这一过程中,缆绳受力十分复杂,缆绳姿态反复呈现为曲线、直线状态。在船舶进行系缆作业时,精确、有效地计算缆绳张力,对指导实际系缆作业,研究带缆后船舶运动规律,增强船舶操纵运动模拟的逼真度有重要意义。国内外一些机构、学者对船舶靠离泊操纵进行了研究:挪威Kongsberg公司和英国Transas公司开发的航海模拟器[1],都可以表现出缆绳与缆机、滚筒之间的相互作用;LEONARD[2]分析了张力控制条件下海底电缆的铺设问题,给出电缆的运动速率最终由拖点处施加的张力确定的结论;刘鑫[3]利用弹簧-质点模型建立了缆绳的受力模型并实现了缆绳的三维可视化,但可视化效果还有待提高;梁昆仓等[4]使用弹簧-质点模型对船用柔性绳索进行了仿真研究;孙霄峰等[5]充分考虑船舶缆绳的自重,建立了可适用于航海模拟器的六自由度船舶系缆张力计算模型。这些理论研究都是针对船与船、船与岸之间的连接部分的研究,未涉及缆绳与缆机滚筒的交互模拟。针对这一问题,本文根据船舶靠离泊操纵过程中缆绳所处的位置进行分析,提出了缆绳在滚筒上的缠绕算法和在滚筒外的悬链线模型,将这两种模型应用到船舶系缆作业仿真中。将论文的最终成果应用到大连海事大学教学实习船“育鹏”的靠离泊操纵仿真系统中。
1 仿真模型
1.1 悬链线模型
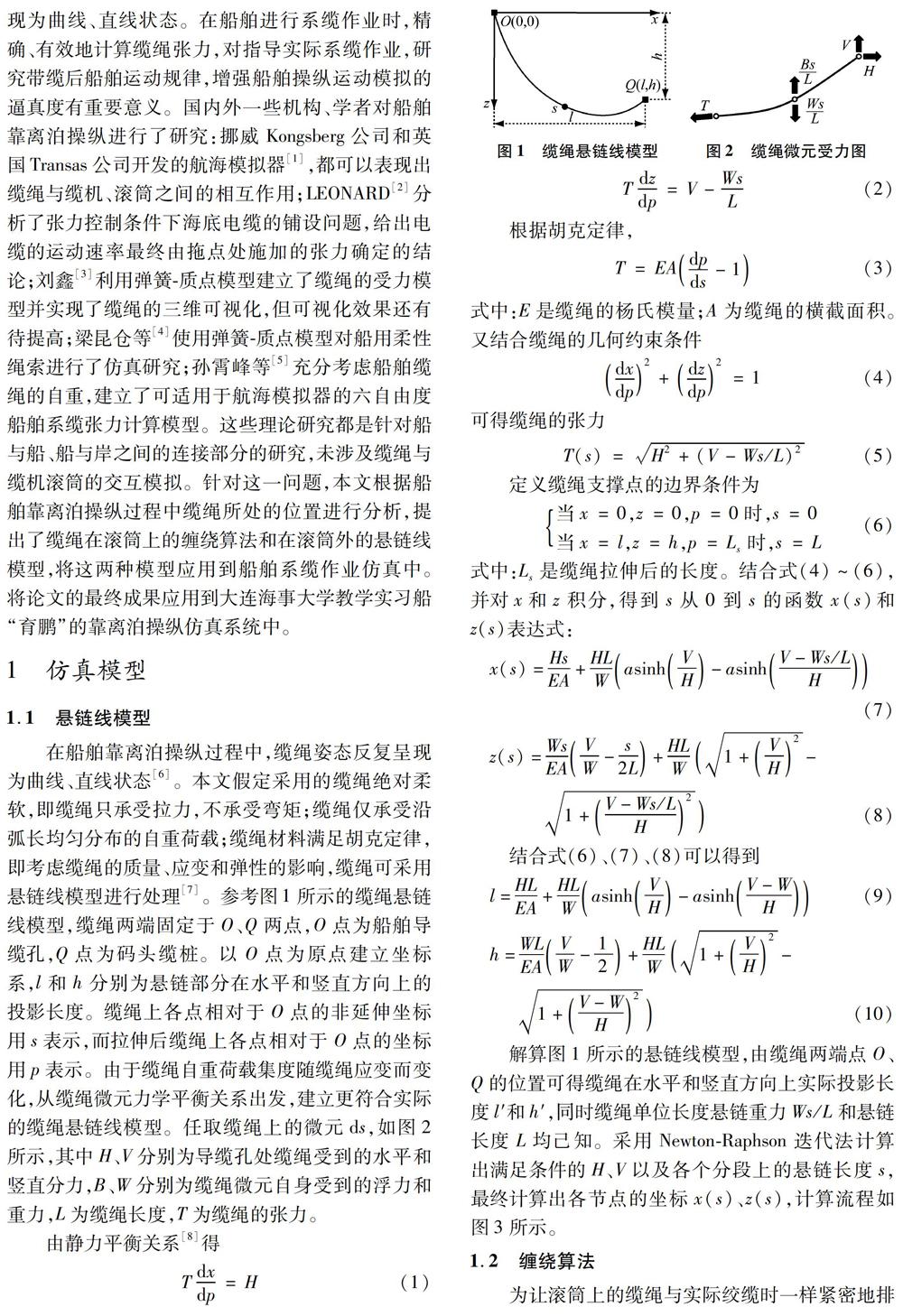
在船舶靠离泊操纵过程中,缆绳姿态反复呈现为曲线、直线状态[6]。本文假定采用的缆绳绝对柔软,即缆绳只承受拉力,不承受弯矩;缆绳仅承受沿弧长均匀分布的自重荷载;缆绳材料满足胡克定律,即考虑缆绳的质量、应变和弹性的影响,缆绳可采用悬链线模型进行处理[7]。参考图1所示的缆绳悬链线模型,缆绳两端固定于O、Q两点,O点为船舶导缆孔,Q点为码头缆桩。以O点为原点建立坐标系,l和h分别为悬链部分在水平和竖直方向上的投影长度。缆绳上各点相对于O点的非延伸坐标用s表示,而拉伸后缆绳上各点相对于O点的坐标用p表示。由于缆绳自重荷载集度随缆绳应变而变化,从缆绳微元力学平衡关系出发,建立更符合实际的缆绳悬链线模型。任取缆绳上的微元ds,如图2所示,其中H、V分别为导缆孔处缆绳受到的水平和竖直分力,B、W分别为缆绳微元自身受到的浮力和重力,L为缆绳长度,T为缆绳的张力。
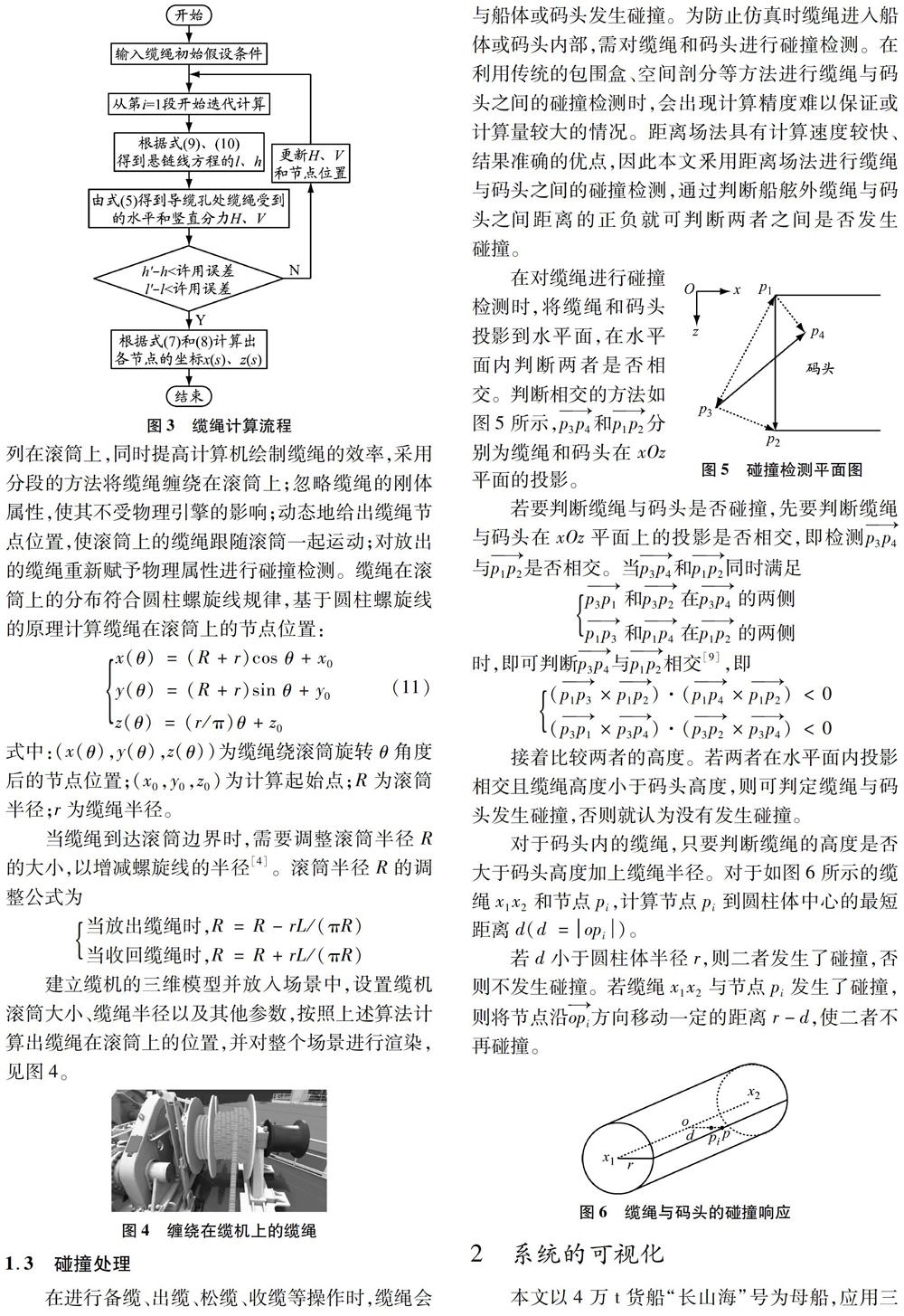
解算图1所示的悬链线模型,由缆绳两端点O、Q的位置可得缆绳在水平和竖直方向上实际投影长度l′和h′,同时缆绳单位长度悬链重力Ws/L和悬链长度L均己知。采用Newton-Raphson迭代法计算出满足条件的H、V以及各个分段上的悬链长度s,最终计算出各节点的坐标x(s)、z(s),计算流程如图3所示。
1.2 缠绕算法
为让滚筒上的纜绳与实际绞缆时一样紧密地排
列在滚筒上,同时提高计算机绘制缆绳的效率,采用分段的方法将缆绳缠绕在滚筒上;忽略缆绳的刚体属性,使其不受物理引擎的影响;动态地给出缆绳节点位置,使滚筒上的缆绳跟随滚筒一起运动;对放出的缆绳重新赋予物理属性进行碰撞检测。缆绳在滚筒上的分布符合圆柱螺旋线规律,基于圆柱螺旋线的原理计算缆绳在滚筒上的节点位置:
式中:(x(θ),y(θ),z(θ))为缆绳绕滚筒旋转θ角度后的节点位置;(x0,y0,z0)为计算起始点;R为滚筒半径;r为缆绳半径。
当缆绳到达滚筒边界时,需要调整滚筒半径R的大小,以增减螺旋线的半径[4]。滚筒半径R的调整公式为
当放出缆绳时,R=R-rL/(πR)
当收回缆绳时,R=R+rL/(πR)
建立缆机的三维模型并放入场景中,设置缆机滚筒大小、缆绳半径以及其他参数,按照上述算法计算出缆绳在滚筒上的位置,并对整个场景进行渲染,见图4。
1.3 碰撞处理
在进行备缆、出缆、松缆、收缆等操作时,缆绳会
与船体或码头发生碰撞。为防止仿真时缆绳进入船体或码头内部,需对缆绳和码头进行碰撞检测。在
利用传统的包围盒、空间剖分等方法进行缆绳与码头之间的碰撞检测时,会出现计算精度难以保证或计算量较大的情况。距离场法具有计算速度较快、结果准确的优点,因此本文釆用距离场法进行缆绳与码头之间的碰撞检测,通过判断船舷外缆绳与码头之间距离的正负就可判断两者之间是否发生碰撞。
在对缆绳进行碰撞检测时,将缆绳和码头投影到水平面,在水平面内判断两者是否相交。判断相交的方法如图5所示,p3p4和p1p2分别为缆绳和码头在xOz平面的投影。
若要判断缆绳与码头是否碰撞,先要判断缆
绳与码头在xOz平面上的投影是否相交,即检测p3p4与p1p2是否相交。当p3p4和p1p2同时满足接着比较两者的高度。若两者在水平面内投影相交且缆绳高度小于码头高度,则可判定缆绳与码头发生碰撞,否则就认为没有发生碰撞。
对于码头内的缆绳,只要判断缆绳的高度是否大于码头高度加上缆绳半径。对于如图6所示的缆绳x1x2和节点pi,计算节点pi到圆柱体中心的最短距离d(d =opi)。
若d小于圆柱体半径r,则二者发生了碰撞,否则不发生碰撞。若缆绳x1x2与节点pi发生了碰撞,
则将节点沿opi方向移动一定的距离r-d,使二者不再碰撞。
2 系统的可视化
本文以4万t货船“长山海”号为母船,应用三维建模软件3ds Max建立船体、系缆装置、港口等三维模型;将模型导入Unity3D引擎中,构建船舶靠泊操纵场景;在三维场景中根据缆绳张力计算模型进行船舶靠泊过程系缆作业的仿真。船舶靠泊操纵过程包括:准备工作、投掷撇缆绳、松缆、绞缆、结束工作等。船舶解缆作业过程基本上与系缆作业过程相同,先收进舷外物体和挡鼠板,当系缆完全松弛时,码头工人从缆桩取下系缆琵琶头,船上船员操作缆机收回缆绳。下面主要对船舶靠泊操纵进行介绍。
2.1 准备工作
在船舶靠泊系缆作业时,船员需要提前5 min上岗做准备工作,如给缆机加油并试车、清理工作现场和移走妨碍带缆作业的杂物。为保证能迅速地将缆绳送出,事先需要将缆绳倒出一部分排在甲板上,并把琵琶头移到各自的船舶导缆孔前。备缆效果图见图7。
2.2 投掷撇缆绳
撇缆是甲板部船员的一项重要基本技能,工作环境的特殊性决定了撇缆绳具有一些区别于普通绳子的特点。撇缆绳多采用直径为6~7 mm的编织化纤绳,长度一般为40 m左右,其尾端为一个眼接环,前端接一个撇缆头。撇缆头的质量为0.35~0.40 kg,可用油麻绳将沙袋编织在内而成,或用撇缆绳直接将沙袋编织在内而成,也可用硬橡胶制成。
操作者进行撇缆操作时,撇缆绳沿着抛物线飞出,直至到达码头。撇缆绳受自身重力而下垂,最终搭在船舷和码头边,撇缆绳动作见图8。抛出撇缆绳后,船员将手中的撇缆绳在琵琶头上打一个撇缆活结,然后将缆绳送出舷外等待执行下一步操作。
2.3 松缆
缆机在松缆绳或绞缆绳过程中,缆绳长度随
时间而变化。如果缆机松缆绳过快,柔性的缆绳可能缠绕在一起;如果缆机收揽绳过快,缆绳张力会变
得很大,损坏拖缆和缆机,甚至超过缆绳的极限强度而导致缆绳断裂。从操纵安全角度考虑,十分有必要研究缆绳在收放过程中的响应。在船上船员操作缆
机时,码头工人拖拽撇缆绳,撇缆绳带着缆绳一起被拉到码头上。缆绳的收放速率根据码头工人拖拽速度设定,松缆绳过程见图9。
2.4 绞缆
当缆绳挂到码头缆桩后,船上船员使用缆机收紧缆绳。收缆速度根据船的位置做相应调整,直至船舶靠上码头。缆绳松紧程度对系泊安全至关重要,操作缆机收紧缆绳时需要对缆绳的破断力进行估算。缆绳的破断力估算公式[10]为
T*=D2×1%×k×9.8
式中:T*为缆绳破断力,kN;D为缆绳直径,mm;k为破断因数。尼龙缆绳的破断因数取1.19~1.33,在本文中破断因数取1.20。
取一条参数如表1所示的尼龙缆绳,计算得到其破断强度为752.64 kN,结合系缆的安全因数(这里取6),得到缆绳的安全强度为125.44 kN,确保在操作缆机收紧缆绳时,缆绳张力小于安全强度。缆绳收紧后的效果图见图10。
當船已靠妥,所有系缆均带好后,应挂上挡鼠板,见图11。盘好多余的缆绳,收妥属具,盖上缆机防护罩,清扫现场,完成系泊作业。
3 结束语
本文根据船舶靠泊系缆作业过程中缆绳是否在缆机滚筒上,分两段建立相应的仿真模型。对于缆机滚筒上的缆绳利用螺旋线原理,通过建立缆绳的缠绕算法模型计算缆绳在滚筒上的收放速度,以实现滚筒外的缆绳与滚筒上的缆绳同步模拟。对于滚筒外的缆绳根据悬链线模型计算缆绳在不同工况下的形状和端点处的受力,同时实现了对缆绳破断的预报分析,验证了本文提出的缆绳模型的正确性和实用性。整合缆绳模型和缆机、岸壁等三维模型,实现了船舶靠泊过程中系缆作业的三维可视化,能够直观地看到系缆作业过程中缆绳的长度、位置变化。建立的缆绳作业仿真模型对船舶靠离泊操纵具有一定的指导意义。
参考文献:
[1]
金一丞,尹勇.公约、技术与航海模拟器的发展[J]. 中国航海,2010(1):1-6,36.
[2]LEONARD J W. Newton-Raphson iterative method applied to circularly towed cable-body system[J]. Engineering Structures, 1979, 1(2): 73-80.
[3]刘鑫. 航海模拟器视景中缆绳的绘制[D]. 大连: 大连海事大学, 2011.
[4]梁民仓, 尹勇. 船用柔性绳索的仿真研究[J]. 系统仿真学报, 2016, 28(9): 1945-1949.
[5]孙霄峰, 尹勇, 张秀凤. 船舶操纵模拟器中的系缆张力模型[J]. 中国航海, 2007(3): 1-4.
[6]MASCIOLA M D, NAHON M, DRISCOLL F R. Static analysis of the lumped mass cable model using a shooting algorithm[J]. Journal of Waterway Port Coastal & Ocean Engineering, 2012, 138(2): 164-171.
[7]IRVINE H M. Cable structures[M]. Cambridge, Massachusetts: The MIT Press, 1981: 101-120.
[8]ANDREAS L, WENNERSBERG L. Modeling and simulation of anchor handling vessels[D]. Trondheim: Norwegian University of Science and Technology, 2009.
[9]赵士涛. 船舶系离泊操纵中缆绳作业过程的仿真[D]. 大连: 大连海事大学, 2013.
[10]金一丞. 航海模拟器[M]. 北京: 科学出版社, 2013.
(编辑 赵勉)
