基于人工势场与红外检测的机器人路径规划
2020-10-21周松林
王 超 周松林
(铜陵学院,安徽 铜陵 244061)
一、引言
路径规划与避障技术是近年来发展较为迅速的一门学科,尤其是在移动机器人[1]领域。如果仅仅为了到达目标,到达作业效果,传统的人工势场算法基本能实现[2-3]。但现有的移动机器人路径规划技术还存在不足,为了提高机器人的自主性和智能性[4-6],针对复杂的动态环境,各种特殊的障碍物有它一定的不确定因素,很容易让机器人陷入平行移动或静止等待等情况[7-8]。
红外检测技术有着自身的特地优点,例如,能耗小、安装方便、反应迅速、便于控制等。可以应用在很多领域,尤其是在避障技术方面,发挥着至关重要的作用。但由于自身的局限性,对于有目标的作业,和未知的环境中,就无法预先知道障碍的运行情况和距离范围,很难发挥它的自主性和智能性。
因此,针对移动机器人的自身特性,结合复杂环境作业等特点,如何快速、准确地找到一条最优路径成为研究问题的关键。
二、人工势场与红外检测路径规划算法
下面首先对人工势场算法进行介绍,然后针对动态环境的特殊性,加入红外检测技术,从而在路径选择中达到较为稳定的效果。
(一)人工势场算法
人工势场法[9-10]广泛应用于路径规划和避障技术中,通过构建一种虚拟力法来处理复杂的环境,特别是未知的环境状态下,更能很好解决问题。它的基本思想是在目标点设计一种抽象的引力场Uatt和在障碍物周围设计一种抽象的斥力场Urep,最后通过求引力场的引力Fatt和斥力场的斥力Frep来控制机器人的运动。
1.引力场建模
由于移动机器人作业的目标点固定,可借用陆地移动机器人的引力势场设计方法[11-14]。设二维空间S 中有一静止机器人 r(x1,y1)和目标点 g(x2,y2),如图1所示。定义S空间内机器人与目标物距离函数为:

其产生的引力场为:

目标吸引力为:

其中nRG是机器人到目标的单位矢量。
2.斥力场建模
图2给出移动机器人所受斥力场的受力情况,障碍物位置是 o(x3,y3)。
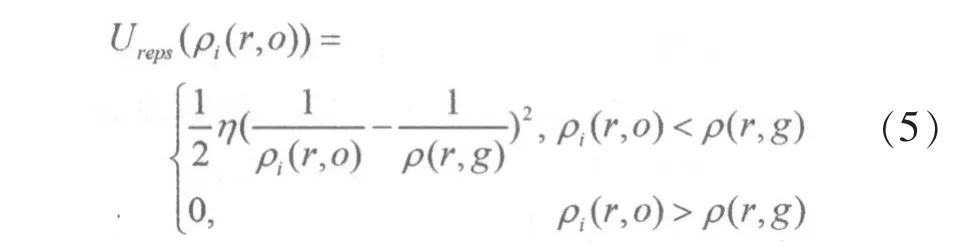
这里给出斥力势场的距离分量表达式:

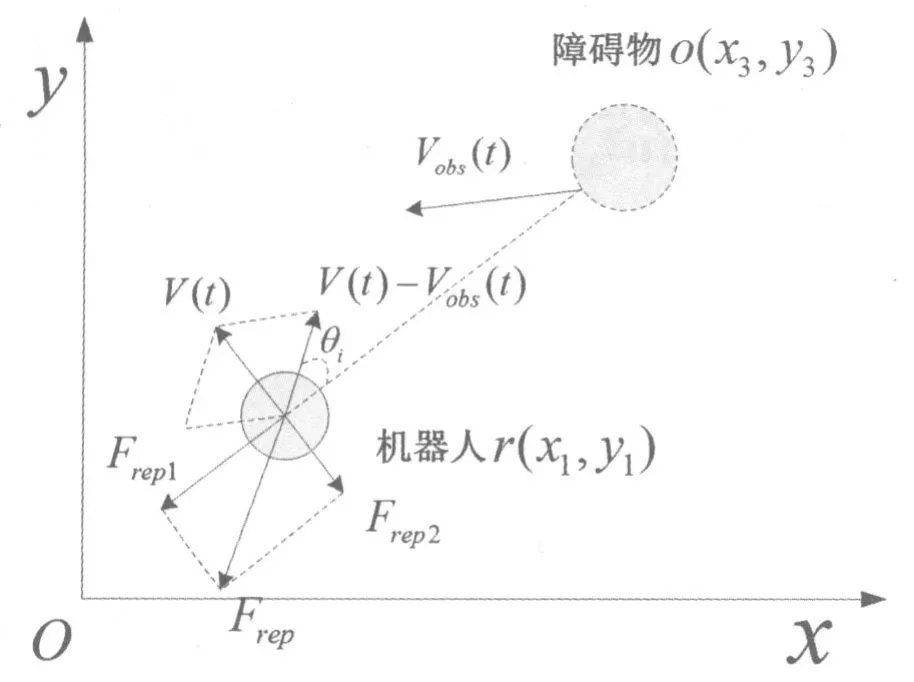
图1 二维空间S中的引力
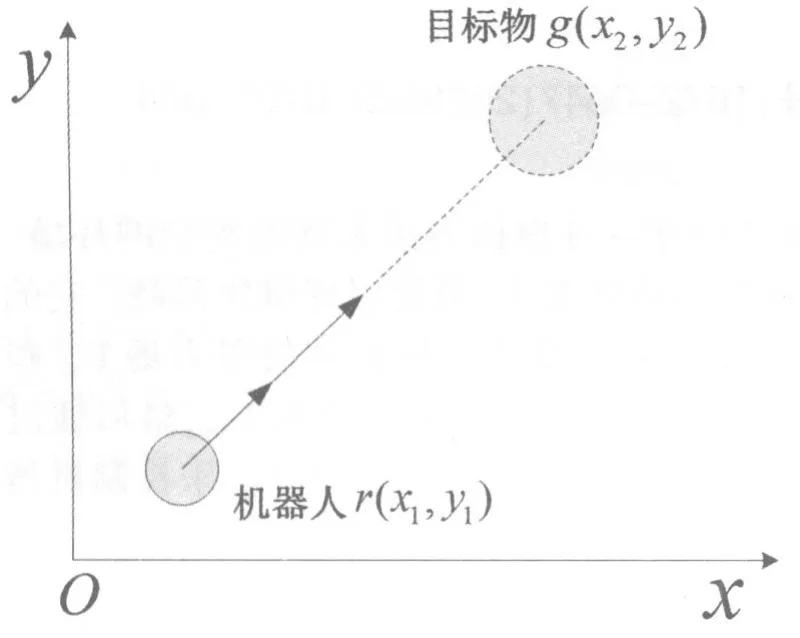
图2 二维空间S中的斥力
第i个障碍物的距离分量产生的斥力场所对应排斥力为:

则对应的总的排斥力为:

那么,总的斥力场函数为:

其中,
第i个障碍物的速度分量产生的势场如式(9)表示,相应的势场力如式(10)、(11)所示:
其中 θi表示相对速度 V(t)-Vobs(t)与距离斥力分量Frep1的夹角,λ是常数系数。
(二)红外检测技术
在很多实际环境中,对于存在动态障碍物的情况,如果机器人在运动过程中不能快速做出避障动作,可能会陷入平行移动状态,如图3所示。导致与目标越来越远,因此移动机器人将不可能到达目标。如何快速避开近距离障碍物成了关键性的因素。
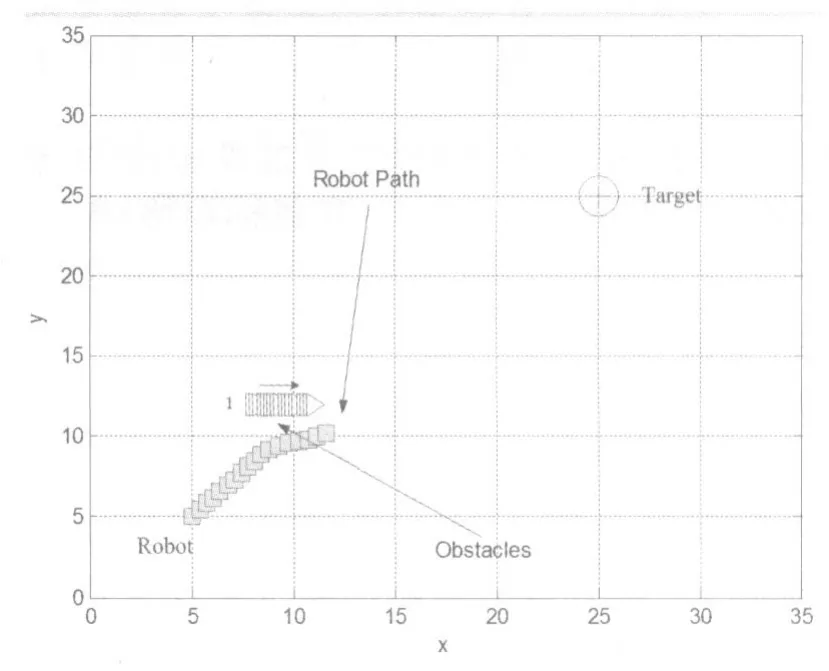
图3 机器人陷入平行移动状态
红外避障模块实物图如图4所示,具有能耗小、便于安装、易于控制等特点,在机器人避障、红外线计数等众多领域有着广泛的应用[15]。该模块发射管和接收管两部分组成,发射管发射一定频率的红外线,当检测方向遇到障碍物时 (可以预先设定检测距离范围10~50cm),红外线返回被接收管接收,经过一定的计算机处理和电路处理程序后,输出一个数字信号,让机器人做出相应的避障动作。
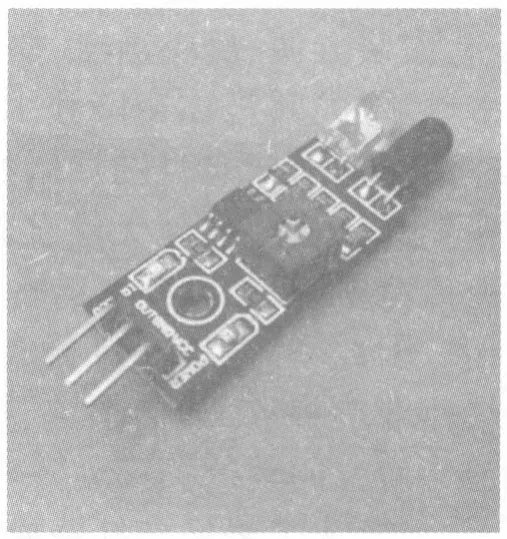
图4 红外避障模块
为了增加避障动作的快速准确,可以采用多个发射源共同工作,不同的发射源频率不一样,例如,50Hz,60Hz……,接收管根据频率的不同判断障碍物的方向,当机器人与障碍物的距离超过预先设定的范围,则继续进入人工势场的路径规划。
三、仿真结果
动态环境存在多种复杂情况,为了达到良好的仿真效果,本章节将动态环境分为障碍物运动、目标静止和障碍物静止、目标运动两种特殊情况。下面主要讨论障碍物运动、目标静止这种常见的动态环境。设定机器人的移动速度V(t)大小为0.10m/s。
其中m,n是正常数,其取值决定了势场函数曲线的形状。如果m=1,会使求导后出现引力无界情况,造成机器人在目标点抖动[12],在仿真试验中,取m=n=2,其余参数的取值在[0.1,10]内调节,能达到良好的实验效果。 对于引力场,取 α=5.5,β=0.5,;对于斥力场,取α=1,γ=2。以绿色小方块代表机器人,蓝色三角形代表障碍物,移动机器人的开始坐标为[5,5],目标点的坐标为[25,25]。在机器人和目标点之间设置了3个不同方向匀速运动的障碍物:障碍物l的位置坐标为[8,12],从t=0s时刻开始自左向右水平方向运动,速度为 0.04m/s;障碍物 2 的位置坐标为[16,18],从 t=90s时刻开始自上而下竖直方向运动,速度为0.05m/s;第三个障碍物的坐标为[22,18],从t=180s时刻开始斜向左上方45°方向运动,移动速度为0.06m/s。
由图5可知,在势场力的作用下,机器人在运动的过程有向右避开障碍物的趋势,但由于障碍物的相对移动情况,让机器人陷入平行移动,这时红外避障模块进行快速处理,使得机器人成功的向右避开了障碍物1,图6中,机器人分别避开障碍物2和3,机器人避障运动的完整路径见图7。
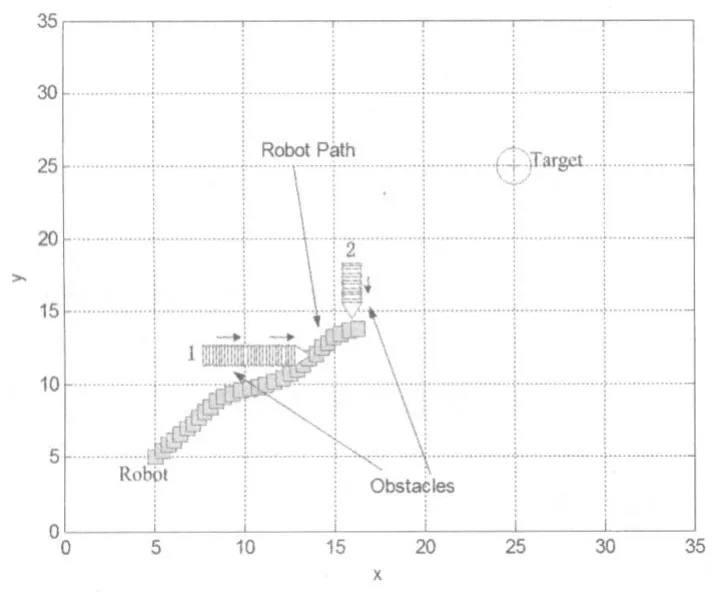
图5机器人运动路径
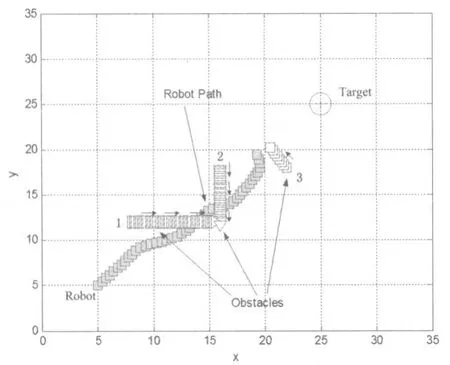
图6 机器人运动路径
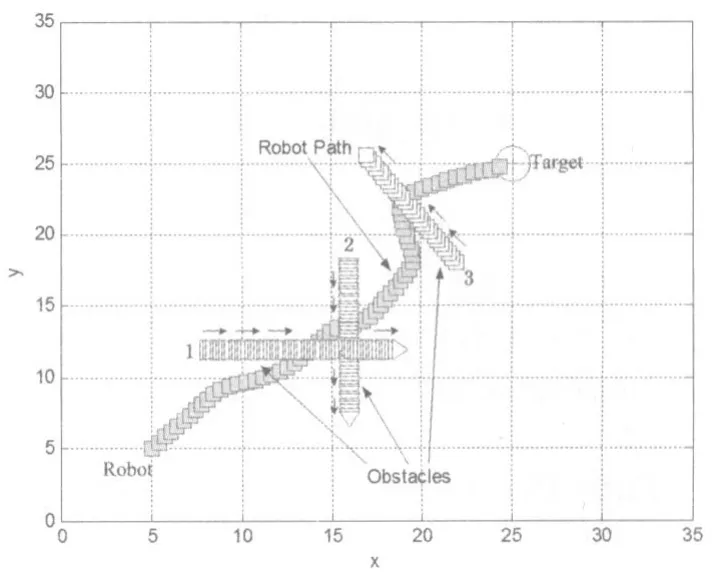
图7 机器人运动路径
由仿真结果可见,本文算法通过设定多个动态障碍物来模拟未知的环境,最终机器人成功的避开移动中的障碍物,而且消除了平行移动等问题,找到了一条最优的运动路径,大大提高了作业效率。
四、结语
对于常见的动态障碍物情况,本文在传统的人工势场路径规划算法的基础上,将红外检测技术应用其中,有效的解决的机器人在运动过程中容易出现的平行移动情况,大大减少了移动机器人的运动路径,达到了最优的规划效果。