APP下载
搜索
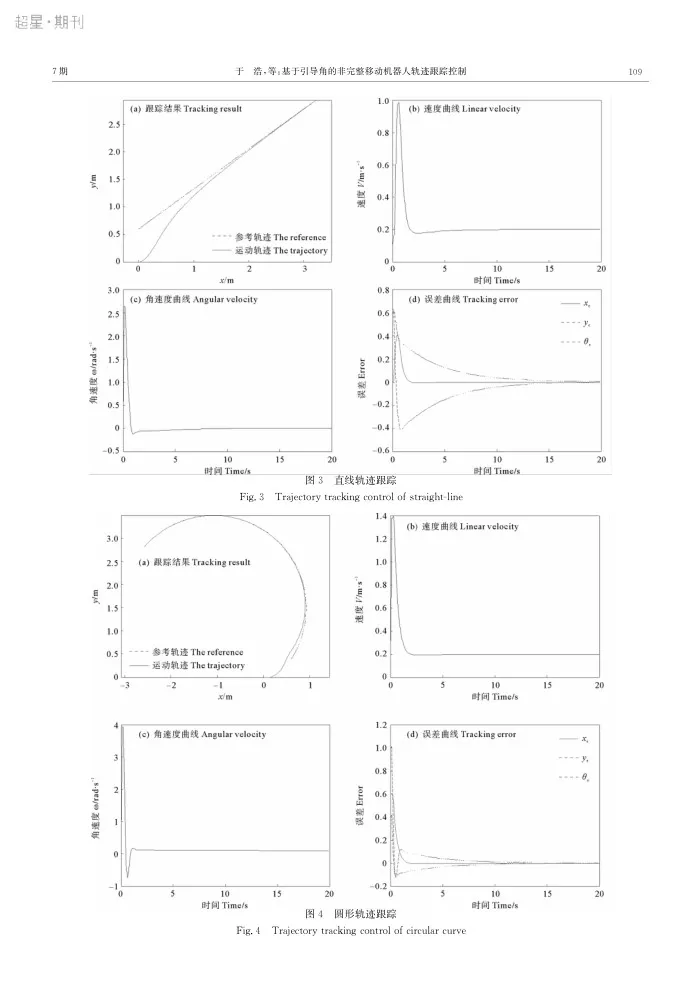
基于引导角的非完整移动机器人轨迹跟踪控制
2014-02-28
于浩,唐功友,盖绍婷
等
中国海洋大学学报(自然科学版)
订阅
2014年7期
收藏
关键词:
移动机器人
轨迹
猜你喜欢
移动机器人
轨迹
移动机器人自主动态避障方法
解析几何中的轨迹方程的常用求法
移动机器人VSLAM和VISLAM技术综述
轨迹
轨迹
轨迹
基于Twincat的移动机器人制孔系统
进化的轨迹(一)——进化,无尽的适应
安踏的轨迹
室内环境下移动机器人三维视觉SLAM
杂志排行
《师道·教研》
2024年10期
《思维与智慧·上半月》
2024年11期
《现代工业经济和信息化》
2024年2期
《微型小说月报》
2024年10期
《工业微生物》
2024年1期
《雪莲》
2024年9期
《世界博览》
2024年21期
《中小企业管理与科技》
2024年6期
《现代食品》
2024年4期
《卫生职业教育》
2024年10期
中国海洋大学学报(自然科学版)
2014年7期
中国海洋大学学报(自然科学版)
的其它文章
利用温度链对南海内波振幅的观测*
一株分离微拟球藻LAMB0002的鉴定*
投喂底栖硅藻对刺参幼参特殊动力作用的影响*
中国对虾选育群体与近交群体不同生长时期的生长性状和存活率的比较*
海州湾近岸张网渔获物种类组成和资源利用现状分析*
西中太平洋经向大气环流的年际变化*