个性化割草机器人外观设计研究
2020-10-17刘力
刘 力
(常州机电职业技术学院,江苏 常州 213164)
0 引言
随着园林艺术产业的技术进步,多样化的割草修整机器不断涌现。在户外智能移动机器人产业,个性化的割草机器人的出现大大降低了人工劳动力,提升了作业效率。近年来,机器人的设计融合了先进的计算机控制技术、抗干扰技术及行为分析原理等,相关学者采用先进的传感识别与控制方法和核心控制算法,致力于研究其内部控制结构及行为规划策略,但针对其外观设计研究较少。为此,笔者在借鉴相关研究成果的基础上,从采摘机器人的外观协调性与合理性角度进行设计研究。
1 工作原理及组成
个性化割草机器人的工作原理源于传统的割草机器。图1为目前国内外常见的个性化割草机器人外观简图,其特点在于将人工控制代替为电源驱动,各执行部件在相互协调配合下实现自动化、智能化的割草作业。表1为个性化割草机器人核心部件及参数列表。其中,电子篱笆长度主要实现工作区域与边界区域的识别与控制行程控制。
结合割草机器人的工作原理及核心部件参数,绘制如图2所示的个性化割草机器人作业运动原理简图。

表1 个性化割草机器人核心部件及参数
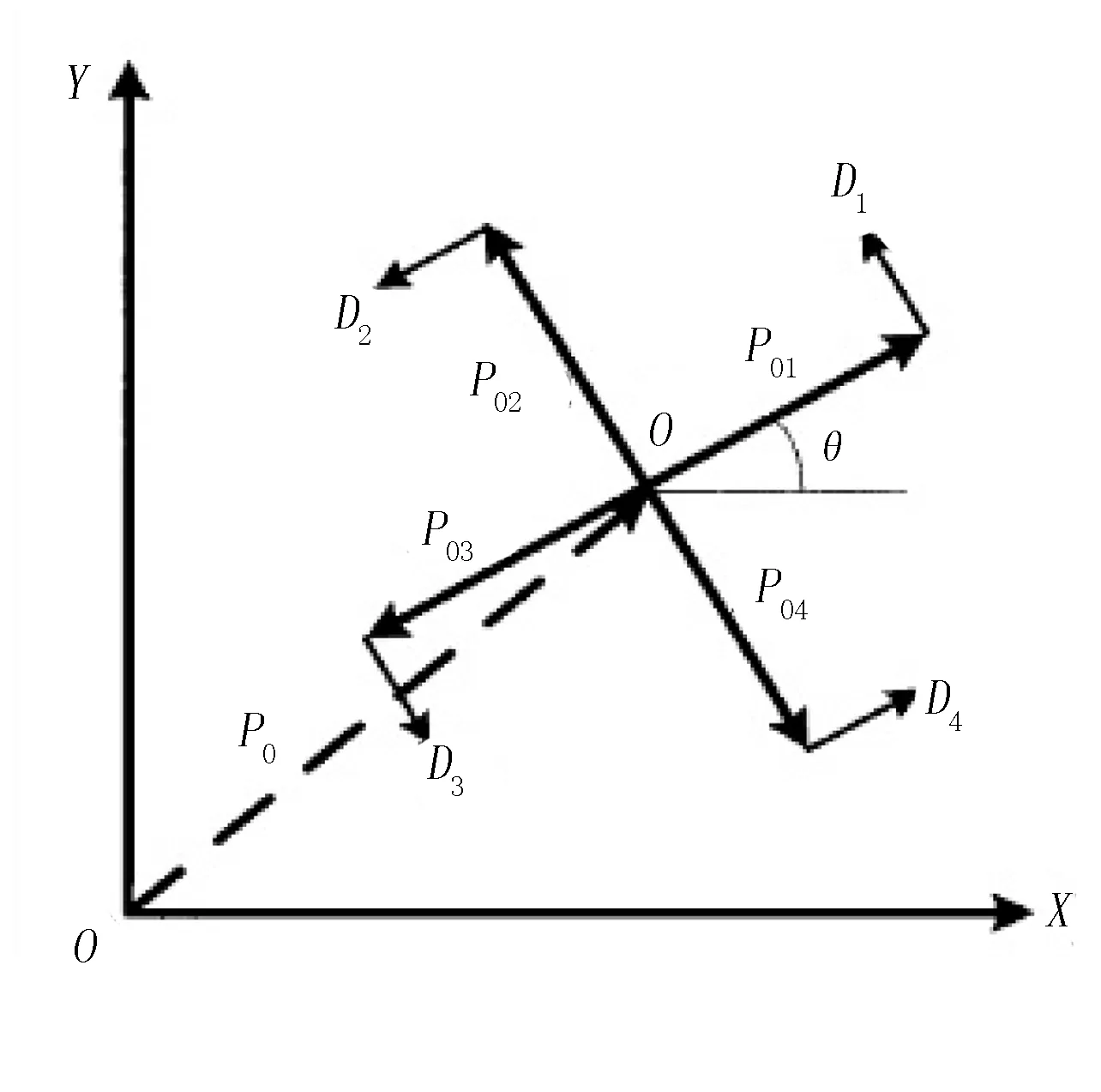
图2 个性化割草机器人作业运动原理示意图
图2中,以逆时针方向为正,进行行走和割草作业,可得出如下运动关系,即
(1)
(2)
(3)
式中R(θ)—割草机器人转向系统矩阵;
P0i—割草机器人各个轮轴的中心位置向量;
L—割草机器人驱动机构至中心的距离;
Di—割草机器人直流电机驱动方向位置向量。
2 外观设计分析
2.1 理论模型建立
针对个性化割草机器人外观设计要求,进行结构及外观信息捕捉。考虑各割草作业环境的多变性因素,通过图像处理关键技术进行场景渲染,实现割草机器人个性化外观建模,如图3所示。以加权平均算法为理念,得出外观图像F设计理论模型为
F(m,n)=ω1A(m,n)+ω2B(m,n)
(4)
式中m—割草机器人个性化外观图像处理像素行序列;
n—割草机器人个性化外观图像处理像素列序列;
ω—割草机器人个性化外观图像处理加权系数。
进一步采用图像转换的INS、GRB-HIS方法,其整机结构模型融入到个性化割草机器人的外观设计考虑因素,且同时进行外观显示质量检测环节,最终得到外观图像的协调性理论模型为
(5)
(6)
式中V1、V2—选定坐标系下的横、纵轴;
I—外观显示亮度,选定坐标系下的z轴;
H—外观显示色度;
S—外观显示饱和度;
R、G、B—外观显示基础颜色色域。

图3 个性化割草机器人图像处理与外观设计框图
2.2 结构模型建立
个性化割草机器人的结构模型建立合理与科学是进行外观设计的必要前提。图4为该机器人的结构组成及控制简图,主要基于多传感控制系统、单片机控制系统和电机驱动控制系统三大模块及感应、处理、控制驱动目标进行设计布局,还包含附属的边界检测、复位指令、实时显示、无线通信等功能实现。

图4 个性化割草机器人的结构组成及控制简图
针对该割草机器人的作业环节,其具体作业行为功能分配如表2所示。路径的识别与避障是割草机器人感知的主要功能,定位、边界识别与转向控制则共同构成了个性化割草机器人的内部动作感知;进行割草作业环节则由割草动作执行部件完成,包含识别作业区域与边界区域的准确度策划。

表2 个性化割草机器人作业行为功能分配
2.3 结构与外观协调分析
结构与外观的协调性分析可实现割草机器人的个性化与智能化设计,外观的形象设计常规应预先在专业软件中模拟处理。割草机器人的结构设计模型主要从工艺与尺寸的角度出发,为得到最优化的设计配置,对于已生成的结构模型文件格式转换须考虑在内。据此设计出基于协调性的个性化割草机器人外观设计流程(见图5),将割草机器人的前结构模型按照一定规则导出为外观设计模型,进行结构模型与设计模型的互为调整,最终通过一定的比例核心控制算法程序整合为个性化割草机器人协调性的外观模型。
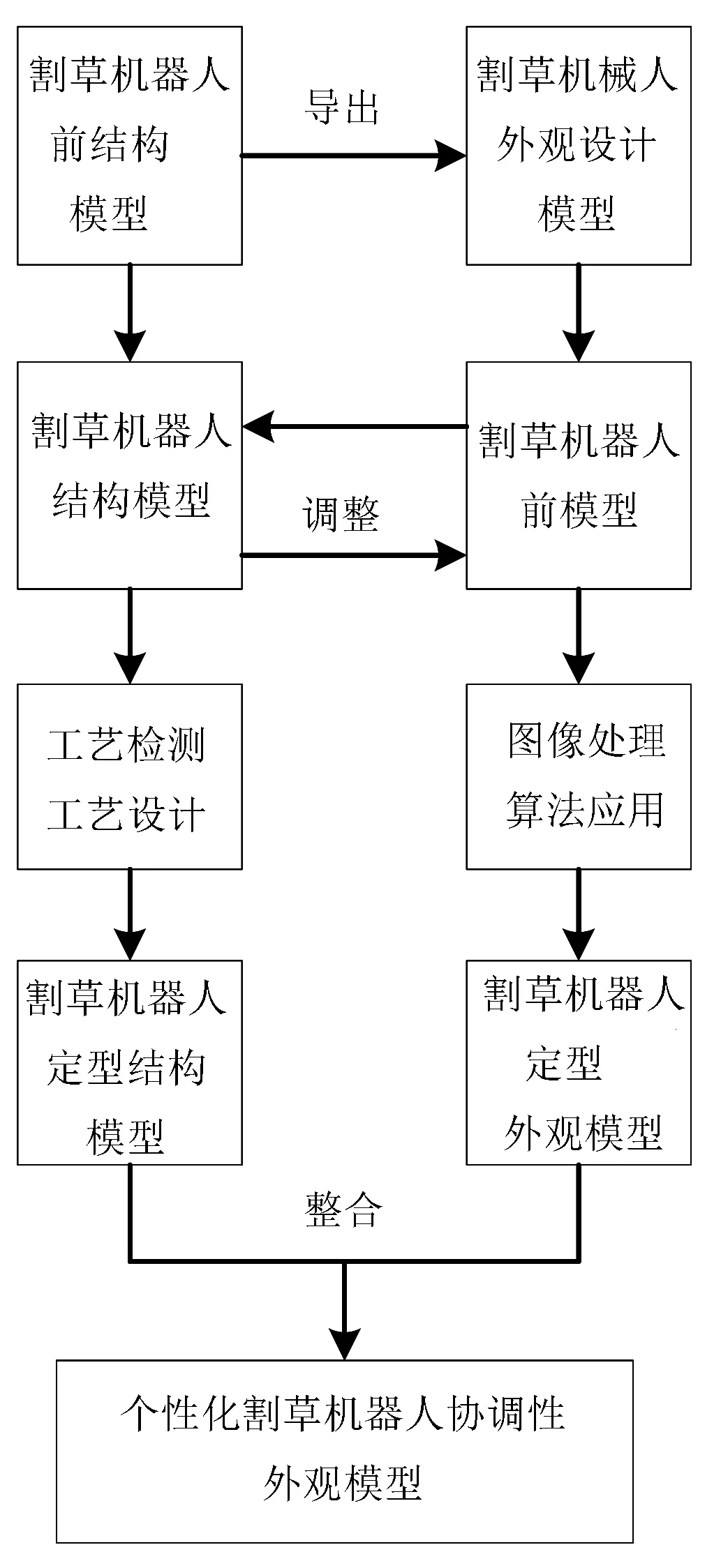
图5 基于协调性的个性化割草机器人外观设计流程简图
结构与外观的转换与协调,关键在于进行设计的处理方法与步骤的选取,具体内部设计处理流程如图6所示。割草机器人的外部结构与设计快速成型基于STL模型和相应的达标分析过程共同实现,从点云的前期处理、数据采集达到割草机器人的曲面造型设计,根据后台输入运行的三维设计程序可得出可视化的三维实体造型,实现直观观察比例协调性、构件布局合理性目标。
外观设计环节中,依次进行特征轮廓线的形成、外观尺寸比例的放缩变形处理、细化节点、拐点的图像显示等,得出个性化割草机器人的整体三维外观模型。此处经正侧曲线拟合处理,给出该割草机器人的外形轮廓程序指令片段如下:
…
common ppiuor line spots( )
{
ppiuor ps=fresh ppiuor( );
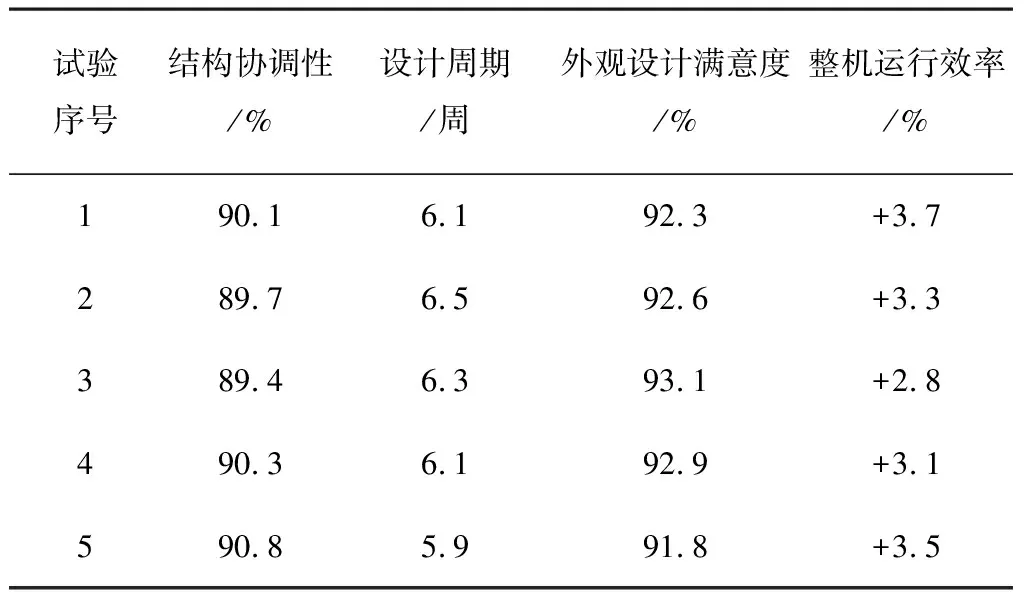
for(integer i=0; i { integer k=1; integer targain, targain0; Do { targain=k*enwordr W+i; targain0= targain- enwordr W; k++; } when (arith.abs(dig Dst[targain]- dig Dst[targain0] if(k== enwordr H) carry on; rest{needle p=fresh needle(i,k); ps.plus(p);} } setting ps; } … 图6 个性化割草机器人外观设计主要处理流程 进行个性化割草机器人设计试验,以人性化和可操作性为目标,进行信号参数设置(见表3),主要实现TAP控制器的选择、测试、复位等。同时,设置主要试验条件:①建模符合实际结构尺寸;②曲面造型特征线提取连续平滑;③结构与外观设计衔接符合功能要求等。 表3 个性化割草机器人结构与外观协调性设计试验信号参数设置 对试验数据相应处理换算后,得到如表4所示的效果评价表。由表4可知:整体测试运行效率较外观设计优化前提升2.8%以上。同时,个性化割草机器人的整机设计约为6周条件下,其结构协调性保持在89.4%以上,此时整机的外观设计满意度保持在91.5%以上,设计合理有效。 图7 个性化割草机器人外观设计试验过程操作步骤实现图 个性化割草机器人外观设计试验后,得出如图7所示的实现设计外观的标准化操作步骤。该步骤整体分为单幅点云处理、多幅云处理、多边形处理及曲面处理4个阶段,每个阶段可具体细化,最终经删除、修改、修补、构建、拟合后得到用户满意度较高的个性化割草机器人设计外型。 表4 个性化割草机器人外观设计试验效果评价 1) 通过理解割草机器人的工作原理及部件组成,分析结构设计模型与外观设计模型之间协调性关系,并利用图像处理融合技术进行个性化割草机器人外观设计试验。 2) 试验结果显示。个性化割草机器人的整机设计约为6周条件下,整体测试运行效率较外观设计优化前提升2.8%以上,设计合理。 3) 经个性化割草机器人外观设计研究,得出进行外观设计的标准化操作步骤,提升了割草机器人外型整机满意度,且稳定在91.5%以上。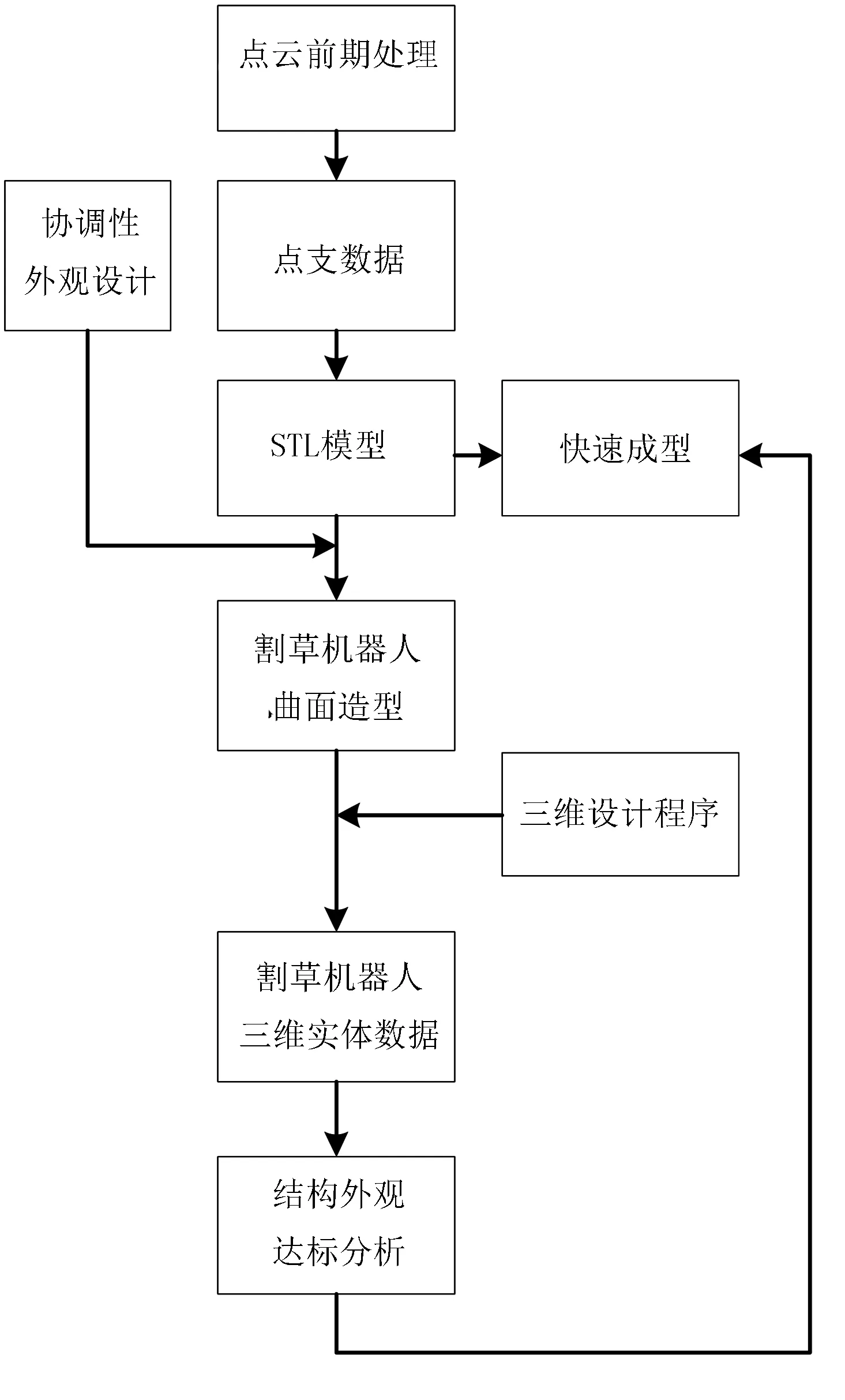
3 外观设计试验
3.1 条件设置

3.2 过程分析

4 结论
