一种基于多频连续波体制的3D交通雷达检测方法
2020-10-15吴俊
吴 俊
(安徽四创电子股份有限公司 合肥 230031)
0 引言
多频连续波体制很早就用在大地勘探和导弹制导雷达中来进行精确测距,随着数字处理理论和器件的飞速发展,使得基于FFT频谱分析技术的多频连续波雷达通过数字比相技术能够同时获得高多普勒分辨力和高距离分辨力[1]。多频连续波雷达得到了巨大的发展,并且广泛应用于测速、测距和低空监视。国际上比较有代表性的产品有丹麦Weibel公司连续波雷达系列,其中有W-700/SL-52M0短距测量雷达,W700/W68i中距测速雷达,MVRS-700测速单脉冲雷达和RR-2100测距雷达,Weibel公司的连续波雷达系统无论在技术还是在性能上,在世界上都是领先的[2-3]。但是由于技术秘密和商业上的利益,国内很少了解其技术细节。针对于多频连续波,许多文章[4-5]做了相关的理论分析和仿真,但仍然没有一个实际的原理样机。文献[6]提出利用多载频MIMO 雷达发射频率分集信号,通过MIMO 雷达多发多收的特性产生虚拟阵列以此扩大天线孔径,利用LFMCW 上下扫频的数据进行精准的测距测速,进行谱峰搜索精确估计目标方向。姜春磊等人[7]推导了多频连续波体制下的信号模型与距离、速度参数估计的克拉美罗下限,并提出了一种基于傅里叶系数插值的二维联合距离-速度估计方法。随着交通工业对于测速和测距的需求,多频连续波也扩展到这个领域[8-9]。
基于深刻的理论分析和分析相关实物,本雷达系统设计十分复杂、精巧。本雷达系统采用特殊的波形在频域进行高分辨率测速和高精度测距,顺序发射多个频率波形,使用参差多频进行测距。精细选择的参数可以简化计算,同时通过比较双天线的相位精确测量目标角度。本雷达系统对于现有交通雷达系统有很大的优势,速度测量精度可以达到0.1 m/s,距离精度0.25 m。基于实际的原理机数据,有效地验证了前期的理论分析。最终研制的雷达通过频域测速具有很高的速度分辨率,并且选择多频点避免距离模糊获得高的测距精度。
1 多频连续波
1.1 时域模型
多频连续波时域模型同时存在多个连续波,双频连续波时域模型如图1所示。
发射两个频率信号,可表示为
s1(t)=A1sin(2πf1t)
(1)
s2(t)=A2sin(2πf2t)
(2)
相应的对于一个动目标的接收信号如式(3)、式(4)
s1r(t)=Ar1sin(2πf1t-φ1)
(3)
s2r(t)=Ar2sin(2πf2t-φ2)
(4)
其中,φ1=2πf1(2R/c),φ2=2πf2(2R/c),因此角度差为
φ2-φ1=Δφ=4πR/c×(f2-f1)=4π(R/c)Δf
(5)
当Δφ=2π,不模糊距离是
R=c/(2Δf)
(6)
根据文献[10],其测量精度为
(7)
根据式(6)、式(7)可以看出,Δf越小,不模糊距离越大,但精度越低。
上述分析是在时域分析的,但时域信号一般有收发泄露,并且包含的地杂波较强,很难通过时域来测得精准的相位并求取距离。不过通过FFT在频域处理可以提高功率信噪比N倍(N是FFT点数),另外动目标频谱不在零频,因此地杂波可以有效去除。
另外同时传输两个频率,f1的回波能够被f1的接收机接收,也可被f2的接收机接收,反之亦然。这样会造成虚假目标,如图2所示。

图2 同时传输两频率模型
如果同时发射并采用一个接收机,混频后的滤波器只有几十kHz的带宽,而不同频点之间差MHz量级,会将另一个频点回波滤掉。因此必须采用单个接收机,并巧妙设计波形。
1.2 频域模型
时域方法中,信噪比要求较高。在实际使用中,除了微波暗室,基本没有符合使用条件的场所。因为地杂波完全可以掩盖目标回波,或使信杂比下降到无法测量目标的程度。在频域,由于信号有相干积累得益,并且收发泄露、地杂波基本在FFT滤波器的零频道附近,因此可以有效检测杂波中目标。
对信号做2N次幂的FFT进行频域变换,当一个目标以径向速度V飞向雷达,则中频信号可以表示为
x0(n)=exp(j·(ωd0n-2πf0·2R/c))
(8)
x1(n)=exp(j·(ωd1n-2πf1·2R/c))
(9)
做FFT后,最大点的相位分别为
φ0=-2πf0·2R0/c
(10)
φ1=-2πf1·2R1/c
(11)
式(10)、(11)相减得
Δφ=4π(f1-f0)/cR0
(12)
其中f0、f1是两个发射频点,R0是目标距离。
1.3 测距模糊
由前述可知,双频连续波测距中,Δf越小,不模糊距离越大,但测距精度越低。根据文献[11]有两种方法可以二次差频和参差多频。二次差频是逐级解模糊的方式,每次测量均可得到无模糊距离,测距精度是逐级提高的。参差多频是多次双频测量得到多个模糊距离,外推至最后一次测量距离,最后利用中国余数定理完成多频解模糊测距。
本系统采用的是文献[12]方法。即发多组频点,对应不同模糊距离。第一组为最大频差,决定最大不模糊距离,目标距离在最大不模糊距离内。这样第一次测距目标距离是不模糊的,但距离精度不高。然后第二组比第一组频差小,测距精度提高,但对目标距离是模糊的,如式(13)所示
Rreal=m·R+4π(R/c)Δf
(13)
Rreal为目标真实距离,R为不模糊距离,m为倍数。其中倍数m是由上一级解算距离来确定。这样测距也是不模糊的,同时测距精度比上一级高。
再根据第三组更小的频差,解算距离,同在式(13)确定解算倍数和精细距离,距离也是不模糊的,测距精度进一步提高。
1.4 测速模糊
根据fd=2v/λ,由目标速度可以确定最大多普勒速度。这样可以确定采样频率,和采样持续时间。根据本系统目标最大速度55 m/s,最大fd=9.1 kHz,采样频率fs=21 kHz,这样能够避免速度模糊。而不同频点之间fd,由于频点相差不大,fd实际是相同的。
2 系统设计
2.1 双天线测角
为了实现小型化,天线采用微带天线。同时为了实现和差测角,采用一个发射,两个接收天线形式。如图 3所示,设在θ方向有一远区目标,则到达接收点的目标所反射的电磁波近似为平面波。由于两天线间距为d,它们收到的信号由于存在波程差ΔR而产生一个相位差φ,其中λ为波长
(14)
天线采用低副瓣设计,主副瓣相差20 dB,双程差40 dB。这样保证主波束内目标不受副瓣目标干扰。并通过后台点迹、航迹滤波去除虚假目标。
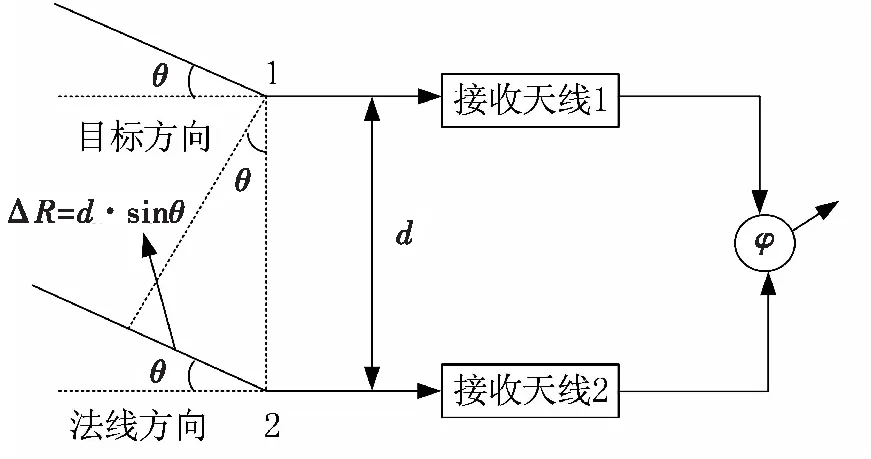
图3 比相法测角示意图
2.2 多频波形设计
为了结构简单,系统采用顺序发射4频点跳频波形,频率范围在24.0~24.25 GHz,形成3组频差信号进行解模糊。实际波形设计图4所示,顺序发f0、f1、f2、f34个频率,每个持续锁相环切换时间为12 μs,4个频率47 μs,持续发1000组共47 ms,这样构成一组处理数据。由于各个频率切换时间很短,目标速度基本不变,而且相差不大,同一目标求得多普勒频率是一致的。

图4 系统波形设计
2.3 信号处理流程
后端信号处理接收两路中频模拟I/Q信号,对两路I/Q信号进行放大、采样,再经过处理形成和差信号。首先对和差信号进行高精度地测角,得出目标方位信息;然后利用FFT算法得出多普勒频移,计算出速度、谱宽信息;并且根据1.3节描述得出目标距离信息,最后进行虚假目标剔除、多散射点凝聚、目标识别。

图5 信号处理流程图
2.4 自动标校
本雷达具有较完善的标校功能,可以对天线的和差波束进行标校、修正。同时为了对不同目标进行分类,可以对不同距离、不同强度的目标进行基准标校。同时系统还能根据自身存储信息或由终端软件输入的雷达安装位置信息完成天线坐标数据与道路车道信息数据的坐标系计算。此外所计算的数据按照一定的协议传输至软件终端,实现软件的后期开发,并用多个3D雷达可以联网,实现联合跟踪,充分发挥3D交通管理雷达的性能。
3 仿真分析
仿真(噪声均值为0.5,标准方差为1,时域SNR=6 dB,M=1000点,顺序发射连续波,1000次仿真)如图6(a)、图6(b)、图6(c)为目标速度30 m/s,目标距离120 m的仿真情况;图6(d)为距离相同、速度不同双目标检测情况(目标1速度30 m/s,目标2速度110 m/s,目标距离均为120 m)。
从图6(a)中可以看出,两个频点的最大点序号k处于同一位置。经Matlab仿真,测量距离为120.1617 m,图6(b)中测量距离为25.4213m,距离接模糊后为119.8792 m;图6(c)中测量距离为15.3506 m,距离解模糊后120.2253 m;图6(d)中可以得出,两目标能分辨,距离分别为121.7915 m,120.1918 m。经多次仿真得到不同信噪比测距误差如表1所示。

图6 FFT频谱图

表1 不同信噪比测距误差
4 应用与分析
本雷达整个系统相对紧凑,仅有信号处理和射频两个部分。射频信号产生、混频、接收仅由一个微波芯片组成。时序波形控制和信号处理由单个DSP芯片完成。由DSP产生相参波形、控制发射时序和信号采样。同时信号处理匹配目标、计算目标距离,形成目标参数,并传输到后台计算机。消除虚假目标、目标起始、目标跟踪、目标终止、目标分类、目标统计、数据存储、网络互连,均由后台计算机完成。系统同时具有校准和错误诊断功能。
实际原理样机照片如图7所示,上半部分是雷达,前面是微带板天线,后面是信号处理部分;下半部分是摄像机,共同整合进前端系统。

图7 工程样机照片
利用实际的样机大量数据采集并验证,如图8、图9所示分别为单人和双人跨越波束的点迹图,结果验证了本文提出的目标检测方法的有效性;图10为系统界面,雷达和摄像机的点迹完好匹配。
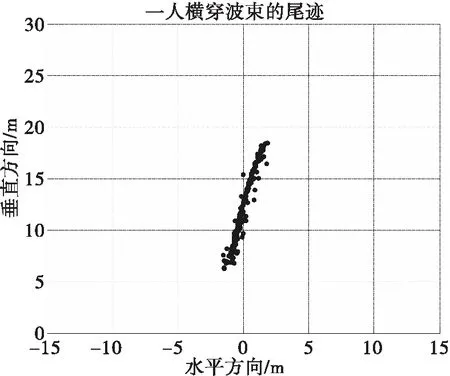
图8 单个人跨越波束的点迹

图9 两人跨越波束的点迹

图10 3D交通雷达终端界面
5 结束语
本文设计一种基于参差多频连续波同时测速测距的3D交通雷达,采用宽波束发射,并采用两个接收天线,获得高角度精度。顺序发射4频点跳频波形获得较大的不模糊距离覆盖测量距离内所有目标,并且拥有高测距精度。本雷达系统对于现有交通雷达系统有很大的优势,对于行人的探测距离达到50 m,车辆的探测距离为160 m,速度测量精度可以达到0.1 m/s,距离精度0.25 m。针对3D交通管理雷达的特殊要求和自身特点,跳出原有雷达各分机分系统的界限,将天线与射频部分集成化、芯片化,信号处理小型化、集成化,数据处理部分开放式软件化,从而实现雷达体积的小型化。