基于自学习的校园停车区域规划系统
2020-09-29陆苏阳杨玉棋王钦耿飚
陆苏阳 杨玉棋 王钦 耿飚

摘要:随着高校招生规模的扩大,进入校园的车辆不断增多,校园内原有的停车区域已经不能满足日益增长的泊车需求,再加上高校内原有的停车位规划不尽合理,这就迫切的要求对高校停车位规划进行改良。在高校内利用基于图像识别技术构建的停车区域规划系统不仅可以根据实际泊车情况动态的规划车位,还能在分时段运行不同标准的停车检测,对停放车辆进行智能化管理。
关键词:停车区域;动态规划;图像识别;聚类算法
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)17-0076-02
Abstract: With the expansion of college enrollment scale, the number of vehicles entering the campus is increasing, the original parking area on campus can not meet the growing demand for parking, coupled with the original parking space planning in the university is not reasonable, which urgently requires the university parking space planning to improve. The parking area planning system in colleges and universities based on image recognition technology can not only plan parking spaces according to the actual parking situation, but also run different standard parking detection in time-sharing time, and intelligently manage parked vehicles.
Key words: parking area; dynamic planning; image recognition; clustering algorithm
1 当前校园车停位存在的问题
多数高校建校已有年头,导致校园内的停车设施规划跟不上车辆增长速度。落后的静态交通规划不能满足师生需求,机动车、行人和非机动车的矛盾日益突出,这就使得校园泊车问题已经成为影响高校加速发展、扩大规模的重要因素,因此做好高校校园停车区域的规划与设计是完善当前校园建设的一个重要任务。
2 基于自学习的停车规划系统
针对现有停车位存在的问题,本文提出一种基于自学习算法的校园停车区域规划系统。
系统设计以停车位划分为核心内容,在使用图像识别技术获取大量停车数据信息的基础上采用聚类算法,从而针对停车区域的位置给出人性化的劃分,对于车辆停放检测采用分时段执行不同的检测标准。具体设计如下。
1)选择准确且高效的图像识别算法用来识别车辆并记录各个检测到车辆的位置信息。
2)在得到车辆数据信息的基础上,选择合理的聚类算法对车辆坐标数据进行处理,得到概率密度最大聚类中心,再获取所有聚类中心的最小外接平行四边形即为停车概率最大的模糊停车范围。
3)由前端输入需要划分精确停车位的数量信息,在上一部分得到的最小外接平行四边形四角坐标的基础上设计算法对模糊区域进行等分记录所有等分点的坐标,依次连接即为精确停车位的坐标信息。
4)根据当前时间,对照分时段设置,采用严格检测模式或宽松检测模式。
2.1 图像识别算法
图形识别算法使用YOLO算法,其运行速度快结构简单结果准确,其核心思想是通过划分单元格,使用滑动窗口技术依次对其进行检测,将图像检测转化为图像的分类。YOLO算法可以为每个b-box预测出所需要的坐标(tx,ty,tw,th,to),公式如下。
bx = δ(tx) + cx
by = δ(ty) + cy
bw = pwe^(tw)
bh = phe^(th)
Pr(object) * IOU(b, object) = δ(to)
YOLO算法采用了leaky ReLU函数作为激活函数,使用端到端的方式进行数据集的训练,让使用者只将重点放在输入端与输出端,简化了使用流程。整个算法包含252层,输入数据源大小为320*320,416*416,608*608(必须为32的整数倍),有5次步长为2的下采样;输出三个不同尺度的feature map(13*13*255、26*26*255、52*52*255),每个划分的单元格会预测三个box,每个box有5个基本参数(x,y,w,h,c)对应的每个种类都输出一个概率,coco类别共有80个类,共计需要预测3*(80+5),合计255。
2.2 数据库设计
本系统需要以下几张四张表,用来存储车位坐标信息及车辆停放信息:
accurateparkingspace 精确车位位置表,包含编号,各车位四角坐标,标记位(有无车辆停放);
parkinginformation 停放信息表,包含车位编号,停入时间;
tobedeterminedspace 待确定停车位表,包含yolo算法检测到各量车的中心坐标;
vagueparkingspace 模糊停车区域表,包含模糊区域的四角坐标。
采用体积小、执行命令速度更快的MySql作为存储车辆及车位坐标信息的数据库。
2.3 meanshift算法获取目标聚类中心点
1)经由YOLO算法计算得到每个b-box目标框的中心(在每次迭代画框的过程中,通过计算(left + (right - left) / 2)与(top + (bottom - top) / 2)得到每个目标框的中心横纵坐标),将所获得中心坐标存入tobedeterminedspace表中;
2)从tobedeterminedspace表中提取待确定范围中心点坐标,交由meanshift算法来进行聚类,设置合理的距离阈值,得到停车概率最大的各聚类的中心坐标;
3)得到聚类中心坐标后,使用openCV库中包含的cv2.minAreaRect()函数来获取最小外接平行四边形的中心的横纵坐标、宽高及调整的角度,再使用cv2.boxPoints()函数来计算最小外接矩形的4个顶点坐标,记录这四个角的坐标并存入vagueparkingspace表。
2.4 精确区域划分
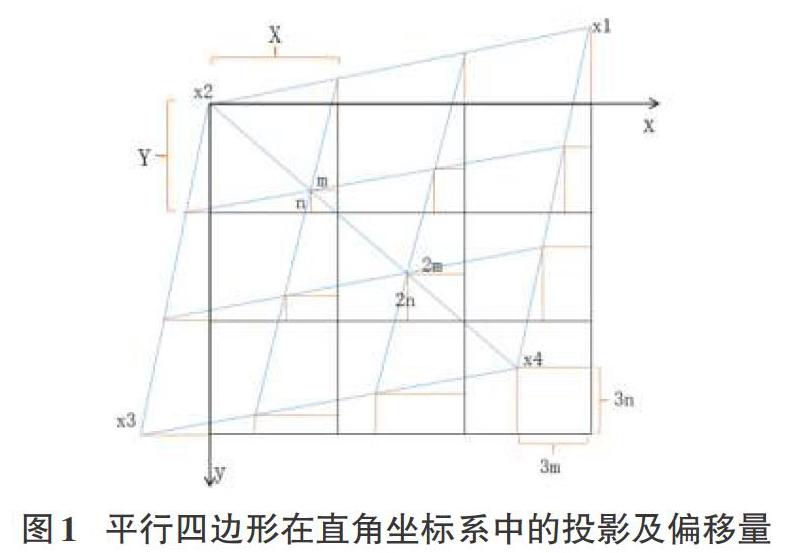
该划分方法主要依赖于模糊停车区域的范围,通过前端界面输入需要划分的行列信息,对模糊停车区域的边缘进行等分操作,若原模糊区域的四角分别为x1、x2、x3、x4,且x4是离原点最远的一个坐标,那么则以x2为原点,重新构建直角坐标系,而将x1的横坐标与x2横坐标差的1/m作为该坐标系在x方向上的单位尺度,记位:X,将x3的纵坐标与x2的纵坐标差的1/n作为该坐标系在y方向上的单位尺度,记为:Y。实际x1、x2、x3、x4与其边缘及内部的各等分点在该直角坐标系上呈一一对应关系,这些点与对应点之间存在着一个横坐标上的偏移量记为m,纵坐标上的偏移量记为n。该偏移量可以通过x2与x4的关系得出,若要在横坐标方向划分j个等分点,则偏移量m = [x4_x - ( x2_x + j*X)] / j,偏移量n = [x4_y - (x2_y + i*Y)] / j。
下面以划分三行三列为例:
从左至右,从上到下记为:
a[0][0] a[0][1] a[0][2] a[0][3]
a[1][0] a[1][1] a[1][2] a[1][3]
a[2][0] a[2][1] a[2][2] a[2][3]
a[3][0] a[3][1] a[3][2] a[3][3]
x轴上一个单位的尺度X = (x1_x - x2_x) / 3;
y轴上一个单位的尺度Y = (x3_y - x2_y) / 3;
x轴上一个单位的偏移量m = [x4_x - ( x2_x + 3X)] / 3;
y轴上一个单位的偏移量n = [x4_y - (x2_y + 3Y)] / 3。
设计分割算法,通过嵌套循环的方式一次性遍历完全部的分割点及四角坐标:
1)计算x + y,值最小的记为x2;
2)由于openCV存储最小外接平行四边形的四角坐标是通过逆时针顺序存储,故可以通过列表索引的方式,在确认出x4的坐标后依次推算出x1、x2、x3的坐标,并按照顺序存入vagueparkingspace表中;
3)以x2为参考点,命名为a[0][0],a[0][0]坐标初始为(a,b),则:
2.5 车辆停放检测
由于不同时间段对于车辆停放检测的标准不需要完全相同,在高频时间段(8:00~22:00),车辆必须严格按照车辆停放位置所规定的区域停放车辆,否则会干扰正常的交通。但是在深夜的低频时间段(22:00~次日8:00),在该时间段内,挪车情况很少,而且在校园内常常由于车位数不够导致车主随意在路边停车,针对这种现象,完全没有必要浪费大量的人力物力在深夜对这些停放车辆进行违规处罚。
基于上述观点,笔者为本系统规划了一套简单的车辆停放检测功能,主要目的是为例实现分时划分停车区域,在高频时间段,启用严格的检测模式,监测车辆是否进入停车位;在低频时间段内不对车辆停放位置做检测,只是展示适合停车的模糊区域。
检测流程如下:
选择一个数据源:摄像头传输的视频;
选择模式:车辆停放检测;
开始检测车辆,系统时间:
8:00~22:00:执行车辆停放精确检测,车辆中心坐标是否进入车位:
是,前端输出几时几分有车辆进入编号为几的车位,parkingInformation表记录停放车位的编号(serial_number)、记录in_time、accurateParkingSpace表对应编号的标记位park修改为1;
否,返回继续检测;
22:00~8:00:执行车辆停放模糊检测,判断车辆中心是否进入模糊停车范围。
3 结束语
此系统主要是应用在校园内未划分车位的情况下,根据记录的大量过往数据得到的停车概率最大的位置来规划停车范围,进而由管理人员确定此处应该精确划分的车位数量。依据这种自学习模式得到的停车位能在最大程度的满足大部分车主对于停车区域所在位置的需求。同时通过分时段执行不同的检测标准,在白天执行精确的车辆停放检测,在夜晚则提供一个模糊的停车范围供车主选择,使得停车管理模式更加人性化。
参考文献:
[1] 裘国平, 顾伟, 何东明, 等. 大数据时代下停车模式转型研究[J]. 智能城市, 2019, 5(23): 1-5.
[2] 宋汝玫. 国内外停车场规划研究现状分析[J]. 科学与财富, 2017(4): 52.
[3] Redmon J, Farhadi A. YOLOv3: An Incremental Improvement[J]. 2018.
[4] Comaniciu D, Meer P. Mean shift: a robust approach toward feature space analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5): 603-619.
[5] Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), July 21-26, 2017. Honolulu, HI. IEEE, 2017: 7263-7271.
[6] 闞馨童, 李恺, 张露露, 等. 高校校园停车场规划与设计[J]. 山西建筑, 2018, 44(3): 2-4.
[7] 李文鹏. 深度学习在车牌识别中的研究与应用[D]. 西安: 西安工程大学, 2018.
【通联编辑:谢媛媛】
