基于组合模型的自行车微观仿真
2020-09-28严巧兵胡润泽
张 蕊,严巧兵,胡润泽,马 尚
(1.北京建筑大学土木与交通工程学院,北京 100044;2.北京建筑大学通用航空北京实验室,北京 100044;3.北京建筑大学北京市城市交通基础设施建设工程技术研究中心,北京 100044;4.北京公共交通控股(集团)有限公司,北京 100161)
为了精准再现非机动车交通运行情况,细致刻画非机动车交通行为,建立合理的微观仿真模型成为非机动车交通流研究的重要方向.经过国内外学者的不断探索研究,非机动车仿真已取得了长足的进展,目前有代表性的微观仿真模型主要有跟驰模型、元胞自动机模型、社会力模型等.跟驰模型[1-2]建立在车道划分基础上,认为自行车严格按照所划分的车道骑行;元胞自动机模型[3-6]将车道网格化,将自行车前行过程抽象为在网格中的跳跃.这2种模型的仿真机制都会导致仿真结果不同程度的不连续、不细致,与真实情况存在偏差.社会力模型最早由德国Helbing等[7]学者提出,主要用于行人领域的仿真研究,2007年后陆续有学者将其应用到非机动车微观仿真[8].由于其仿真具有时空连续性的特点,所研究对象的运动方向可以依据受力情况实时变化,不需要按照固定车道或网格运动,因此相比于上述其他模型,社会力模型在描述非机动车交通行为上更为细致真实.
社会力模型通过接触力来描述行人间或行人与障碍物发生接触时相互推动的现象,应用于非机动车微观仿真时,如何避免非机动车之间及非机动车与边界的直接接触且保持合理间距成为仿真的关键问题.尤其是非机动车道边界多元化,不同边界作用力影响差异较大,增加了研究的复杂性.Liang等[9]和梁肖[10]基于社会力模型建立的自行车仿真模型保留了个体接触力及滑动摩擦力,对避免自行车间及其与边界的直接接触并未给出有效的解决方法;李珊珊[11]通过定义自行车受社会心理力及减速力作用,在某种程度上避免了车辆间的接触,但由于仿真步长的设置本质上并不能完全避免接触问题;叶倩倩[12]、黎茂盛等[13]考虑了边界作用力,但对边界作用强度描述粗糙,模型中对如何避免车辆间或车辆与边界间的直接接触未做说明;Rinke等[14]基于社会力模型建立的混合流多层次结构模型中,自行车只受驱动力及减速力的作用,也未阐述接触力改进的相关问题.
因此,为真实描述自行车横纵向运动行为,避免应用社会力模型导致自行车与障碍物或其他车辆的不合理接触,本文引入骑行者生理感知空间的概念,采用颗粒离散元理论对社会力模型中的接触力进行修正.考虑非机动车交通组织的多样性,根据边界作用强度量化不同边界对自行车排斥力的影响.建立了包含驱动力、自行车之间排斥力、边界作用力、生理感知空间接触力4种力的组合模型.同时本文根据实测数据对模型进行了验证及应用研究.
1 组合模型构建
自行车在车道路面上的竖直投影近似于椭圆形.本文以骑行者头部鼻尖点为几何中心,自行车车长为长轴,作个体单元的外接椭圆,使得人车恰好包络在内,并以此作为下文自行车研究最基本的单元.
1.1 驱动力

(1)
(2)
式中:ri(t+1)、ri(t)分别为自行车i在t、t+1时刻的位置矢量.
1.2 排斥力
排斥力是自行车骑行过程中为了保证自身安全及舒适,避免与其他骑行者或边界障碍物距离过近所受的力.排斥力是骑行过程中的阻力之一,包括自行车之间的排斥力及自行车与障碍物之间的排斥力.
1.2.1 自行车间排斥力
由于骑行者具有一定的速度且身体裸露在外,骑行过程中需要与其他骑行者保持适当的侧向间距,避免与之发生直接接触.调查时发现,骑行者可接受的最小侧向间距与骑行速度有关.速度接近似时,自行车会出现前后跟行或者左右并行的情况,这时就会有前后间距及左右间距;而速度有差异时,一般速度大者会逐渐超越小者,此时只考虑左右间距.根据实测,不同速度下前后及左右最小间距如表1所示.表1中左右间距指车把与车把之间的横向距离(垂直车道方向),前后间距指后车前轮与前车后轮之间的纵向净距(车道方向).
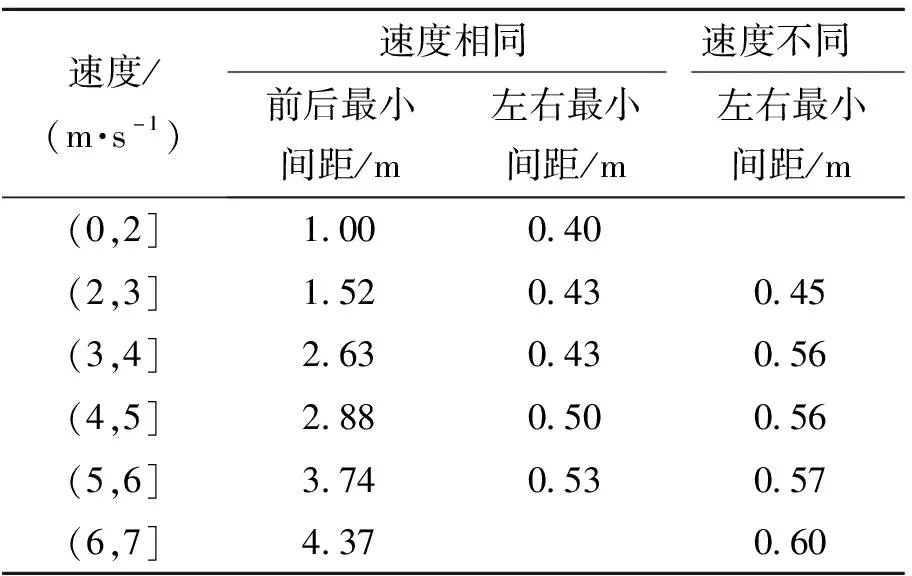
表1 自行车速度-间距关系表
排斥力作用示意图如图1所示,可分解为横向的避让力与纵向的制动力的矢量和.自行车之间距离变小,排斥力会急速增大,排斥力fij可表示为
fij=Aiexp(-Dij/Bi)nij
(3)
式中
(4)
式中:Ai为排斥力强度参数,决定了自行车之间排斥的大小程度,通过最小二乘法拟合实测数据发现最优估计值范围集中在[520,550],本文以540 N进行标定;Bi为自行车之间产生排斥关系的距离,取5 m[9];nij为由自行车j指向自行车i的单位向量;Dij为自行车i至j个体边界距离;dij为骑行者i与j中心点的连线距离;φj为骑行者j与水平方向夹角;θji为自行车i与j中心连线与水平方向夹角;aj、bj分别表示骑行者j短半轴、长半轴长度.
1.2.2 边界作用力
自行车骑行过程中,除与其他自行车保持适当距离外,同样需要与边界保持一定的距离.调查发现,骑行者可接受的最小侧向间距与边界形式也有关.对于左侧为绿化带、右侧为路边停车的非机动车道,骑行者与边界保持最小距离分别为0.45 m和0.25 m;对于左侧为护栏、右侧为路缘石的非机动车道,骑行者与边界保持的最小距离分别为0.20 m和0.35 m.实测数据如图2所示.
对比不同边界下自行车横向分布发现,骑行者偏好于在路中线附近骑行;骑行者对路侧停车保持的侧向间距最大,其次是护栏、绿化带、路缘石.为量化上述作用,本文引入边界作用强度的定义,即不同形式的非机动车道边界对骑行者的产生排斥力的强度.一般骑行过程中,自行车最多仅受单侧车道边界的作用,距左侧边界近则受到左侧边界排斥力fiL,反之则受到右侧边界排斥力fiR
fiL=ALexp(-DiL/BL)niL
(5)
fiR=ARexp(-DiR/BR)(-niL)
(6)
式中:AL、AR分别为左、右边界作用强度,与边界形式有关,利用调查数据进行反复试算,护栏取0.35,绿化带取0.25,路侧停车取0.45,路缘石取0.20;BL、BR分别为左、右边界对自行车产生作用力距离;DiL、DiR分别为自行车中心点到左、右边界的垂直距离;niL为单位向量,由左侧边界垂直指向车道内侧.
1.3 生理感知空间与接触力
骑行者有避开护栏、桩柱等静止障碍物及行人、车辆等移动障碍物的倾向.骑行者身体裸露在外无安全保障空间,无论在生理还是心理层面,都对外界环境的干扰表现十分敏感.因此,可认为骑行者具有一定的生理感知空间,当生理感知空间与外界发生重叠时,即受到侵占、挤压时,畏惧心理会迫使自行车运动状态发生改变.
接触力描述的是行人与行人及行人与障碍物间接触时的受力行为.不同于行人,现实生活中非机动车之间不能接触,否则将会发生交通事故.为真实描述非机动车交通行为,弥补社会力在接触力方面描述的不足,本文从骑行者生理感知空间入手建立了自行车个体单元,即以车长为直径构建一个包裹自行车的虚拟圆柱体,将骑行者与圆柱体之间的生理感知空间发生的接触行为定义为接触力.
该个体单元的优势主要体现在:首先由于有外侧圆形的包裹作用,内部的自行车不会发生直接接触,弥补了社会力模型应用到自行车仿真时不能有效解决接触问题的缺陷;其次圆形具有各向同性,在计算简便方面相较于其他形状根据有优势;最后根据实际调查骑行者可接受的间距在0.5 m左右,自行车宽大概在0.6 m,合计1.6 m接近自行车长,因此以自行车长为直径是建立自行车个体单元最适合的长度,节省了空间也更符合实际.
若个体单元发生接触,在接触力的作用下两者会相互远离,避免内侧自行车直接接触,类似于两球体碰撞过程.值得注意的是,颗粒离散元的接触模型可以真实描述颗粒的接触、分离状态,且其计算方法可大幅降低模型计算量,提高模型运算效率.
因此本文引入颗粒离散元理论,将自行车的接触过程分解为法向、切向运动,法向运动使接触的自行车之间产生想要相互远离的需求,切向运动描述自行车想要减速避让的需求.接触力作用随着生理感知空间接触量的增大而增大的趋势类似弹簧受压行为,因此将其简化为弹簧振子的阻尼运动.
1.3.1 法向接触力
法向接触力是由弹簧和阻尼器共同作用于骑行者i上的弹性力和阻尼力的合力,如图4所示.自行车i受到来自j的法向力接触力fnij为
fnij=(-kna-cnvijnij)nij
(7)
式中:α为重叠量;vij为自行车i相对于j的速度;nij为自行车i中心指向j中心的单位向量;kn为法向弹性系数,本文建立的自行车生理感知空间可压缩程度与行人生理缓冲范围思想相近,因此参考人体力学指标取1 900 N/m[16];cn为法向阻尼系数.
根据Hertz-Mindlin非线性接触模型阻尼系数与弹性系数关系,可计算出自行车法向阻尼系数为780 N/m.
(8)
式中:c为阻尼系数;k为弹性系数;m为质量.
1.3.2 切向接触力
切向接触力是由弹簧、滑动器和阻尼器共同作用在自行车i上的弹性力、摩擦力、和阻尼力的合力,如图5所示.自行车i受到来自j的切向接触力力定义为
ftij=-ktδ-ctvct
(9)
式中:δ为切向位移;vct为接触点的滑移速度;ct为切向阻尼系数;kt为自行车i的切向弹性系数,根据Hertz-Mindlin非线性接触模型切向弹性系数与方向弹性系数之间的关系,可计算出切向弹性系值为1 320 N/m.
(10)
式中:ν为生理感知空间泊松比,取0.37,其余参数同上.
得到切向弹性系数后,同样根据式(8)可计算得到切向阻尼系数ct为654 N/m.
同时根据库伦-莫尔准则,当自行车受到的切向弹性力大于法向弹性力与摩擦因数μs之积时(参考对行人心理缓冲空间摩擦因数定值[17]及实际模型仿真效果确定摩擦因数值为0.3),其所受切向力可修正为
ftij=-μs‖ftij‖nt
(11)
式中:nt=vct/‖vct‖,为自行车i所受切向力的单位向量.
由此,组合模型构建完成,自行车前行过程中所受合力即为驱动力、自行车间排斥力、边界力、接触力四者矢量合.
2 模型验证
相较于其他模型,本文重点建立了自行车生理感知空间,解决了社会力模型应用到自行车仿真时接触力的缺陷,经分析理论及仿真实现上均合理可行.因此仅对速度-密度关系图、自行车骑行轨迹图及速度-间距关系三方面进行分析验证.
2.1 基本图验证
为了验证组合模型的合理性,本文以北京市车公庄大街非机动车道为例进行速度-密度关系图的验证说明.该非机动车道总宽5.8 m(其中路边停车2.3 m),左侧为绿化带右侧为路侧停车(2.3 m).车辆到达服从二项分布,调查时段10 min交通量为452辆/h.仿真道路长设置为200 m,宽3.5 m,左侧为绿化带右侧为路侧停车.为避免仿真数据的偶然性,对该场景进行多次仿真,将得到的仿真结果与实测数据进行对比,如图6所示.
调查数据452条,仿真数据452条,对二者进行95%置信度独立样本T检验(表2),发现方差及均值显著性为0.77及0.65均大于0.05,表明二者相关性显著,组合模型能较好地仿真实际情况;从总体趋势看,调查及仿真得到的密度-速度均呈线性关系,且速度随着密度的增大而减小;调查范围内,车公庄大街非机动车道最大密度约为0.3辆/m2,最大速度约为5.5 m/s.

表2 调查数据与仿真数据独立样本检验
2.2 非机动车骑行现象
自行车设计采用单轨迹形式,骑行过程中需实时调整重心左右摆动,因此在道路上的运行轨迹通常呈蛇形.蛇形轨迹一般宽0.4 m[18],随着速度的稳定,其宽度呈减小的趋势,且偏好车道中线附近骑行,这也是检验模型的重要依据之一.
为验证组合模型的合理性,以仿真结果中骑行者骑行轨迹进行分析.图7为仿真轨迹线,仿真场景为左侧护栏右侧路缘石的非机动车道,仿真区域内仅有自行车1和自行车2且同时生成.初生成时,自行车1和自行车2速度分别为5.8、3.5 m/s;自行车1距护栏0.41 m,自行车1到自行车2距离为0.80 m.
A点前,自行车1初生成时受边界作用力显著,为了骑行的舒适,骑行过程逐渐远离护栏并逐渐摆脱自行车2,而自行车2在排斥力及生理感知空间接触力的作用下不得不向车道右侧避让自行车1;A点处,自行车1完全甩开自行车2;A点后,自行车1自由骑行,自行车2逐渐驶回路中线附近,恢复自由骑行状态.经分析,两骑行者表现出的行为能较好地反映模型效果,轨迹也符合实际摆动情况,证明组合模型对骑行者受力效果描述较为准确.
2.3 间距分析
在2.1的仿真情景下,变换左右边界形式进行多次实验,提取各自行车的速度、位置参数,即可得到不同速度区间下自行车之间及自行车与边界的间距,并将最小间距汇总到表3.对比表1及图2可以发现,仿真结果与实测数据具有较好的一致性;同时,骑行者对于静态的边界敏感度没有动态的自行车高.
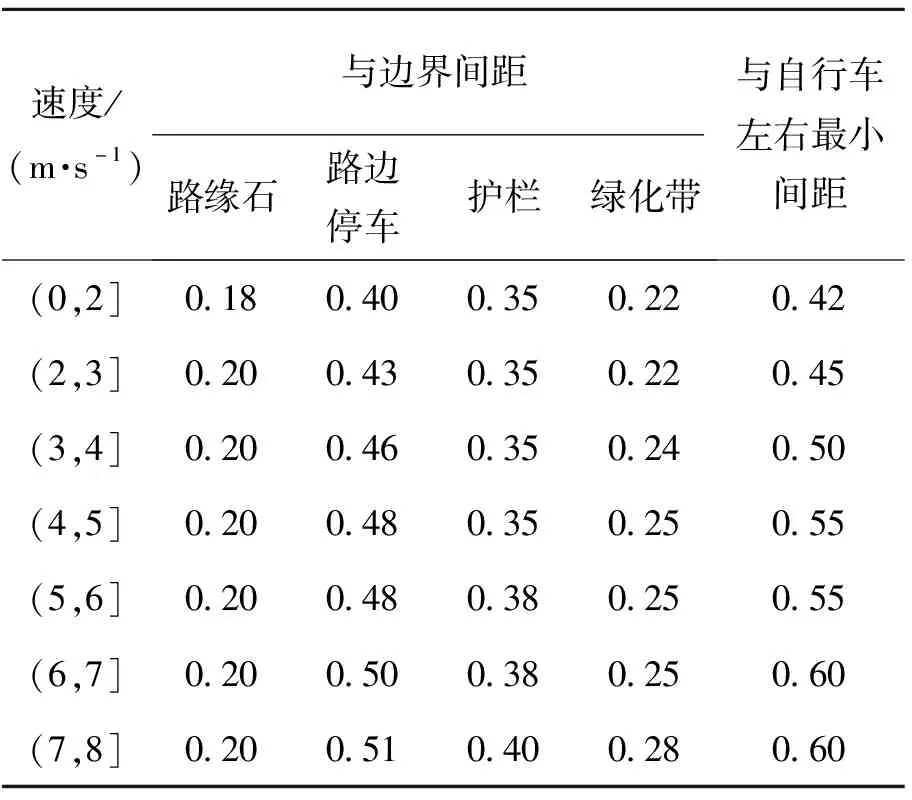
表3 仿真下自行车速度-间距关系表
3 模型应用
本文建立的组合模型考虑了边界影响,为了量化不同边界的影响程度,同时进一步证明模型的有效性,针对3 m宽的非机动车道,通过控制变量法将单独设置某一边界场景与不设置任何边界形成对照组,获取仿真通行能力,并把两者的比值定义为边界折减系数.以有无路侧停车情景为例,根据仿真输出的密度-流量关系图的顶点,可得到3 m宽自行车道仅考虑路侧停车影响的单车道通行能力约为1 634辆/(m·h),无边界影响的单车道通行能力约为1 793辆/(m·h),二者比值即为路侧停车的边界折减系数约为0.911.同理可获得其他边界折减系数,如表4所示.

表4 仿真边界折减系数汇总表
可以发现,不同边界的折减系数不尽相同,其中路侧停车及护栏隔离的折减系数较小,对通行能力的影响较大,这与实际调查中非机动车骑行时与这两者保持较大的横向距离相一致.
4 结论
本文基于社会力模型可以较好描述非机动车微观交通行为特征的优点,引入生理感知空间并利用颗粒离散元理论描述个体之间的相互接触挤压关系,从而改善社会力模型应用到自行车仿真中接触作用力的缺陷;同时考虑不同边界形式对自行车的影响,构建了边界排斥力;最终建立了自行车微观组合模型,并得到以下结论:
1)通过对基本图验证,发现速度密度呈线性关系,符合非机动车的宏观交通流关系.
2)通过对自行车骑行现象分析,该组合模型能较好地模拟蛇形轨迹及骑行时的受力情况.
3)通过间距分析发现,骑行者偏好在车道中线附近骑行;骑行者对路侧停车保持的侧向间距最大,其次是护栏、绿化带、路缘石.
4)利用组合模型在不同情景下的仿真结果,本文量化了不同形式边界对通行能力的影响,得到路侧停车、护栏、绿化带、路缘石4种边界形式对自行车道通行能力的折减系数分别为0.901、0.928、0.940、0.965,即路侧停车对自行车运行影响最大,骑行者与其保持的间距最大,其次是护栏、绿化带、路缘,与结论3)相一致.而这些结论可为自行车的运营管理、自行车道内设施的设计及建设提供技术支撑.
由于研究范围有限、环境相对简单,本文未考虑电动自行车车的影响,同时也未涉及非机动车逆行、机动车占道行驶及驶入驶出停车位等动态干扰,这些均可作为进一步的研究方向.
