UWB人员运动定位的小波阈值去噪方法研究
2020-09-21张冉乔苏中刘宁
张冉乔 苏中 刘宁

摘 要: 针对超宽带定位系统受到人员运动影响,定位精度降低的问题,提出一种超宽带人员运动定位的小波阈值去噪方法。通过研究不同的小波基函数、阈值选取规则和阈值函数对人员运动产生的定位异常影响,根据去噪效果,在启发式阈值估计准则下,确定db5小波5层分解、软阈值函数去噪为最佳去噪方法。通过实验验证表明,该小波阈值去噪方法能够削弱UWB室内人员运动定位中异常值的影响,提高定位精度与定位准确性。
关键词: 超宽带定位; 室内人员定位; 小波变换; 小波阈值去噪; 小波基函数; 阈值选取
中图分类号: TN911.4?34 文献标识码: A 文章编号: 1004?373X(2020)17?0034?05
Abstract: A wavelet threshold denoising method for ultra wide band (UWB) localization of people motion is proposed to solve the problem that UWB positioning system is affected by people movement, which may cause reduction of positioning accuracy. By studying the influence of different wavelet basis functions, threshold selection rules and threshold functions on the positioning anomalies generated by human motion, under the heuristic threshold estimation criterion, db5 wavelet 5?layer decomposition and soft threshold function denoising are regarded as the best denoising methods according to the denoising effect. The experimental verification results show that the wavelet threshold denoising method can weaken the influence of outliers in the UWB indoor human motion positioning, and improve the positioning accuracy and positioning precision.
Keywords: UWB positioning; indoor people positioning; wavelet transform; wavelet threshold denoising; wavelet basis function; threshold selection
0 引 言
随着无线设备和技术的广泛发展以及人们在室内环境中活动时间的增加,对室内人员定位的需求也在不断增加,室内人员定位技术已经变成了定位领域研究的热点[1]。传统的定位技术,如卫星定位、手机定位等方式,受到室内环境中建筑物遮挡和复杂环境等因素的影响,无法满足室内定位的要求。最近几年,出现了如WiFi定位、蓝牙定位、ZigBee定位等室内人员定位技术,但是实际定位效果并不是很理想[2?3]。
超寬带(Ultra Wide Band,UWB)技术最早出现于20世纪60年代,最初只能在军事、灾害救援搜索、雷达定位和测距领域应用。2002年,美国联邦通信委员会(Federal Communications Commission,FCC)宣布了UWB无线通信的初步规范,正式取消了对民用部门UWB使用的限制[4]。与其他的定位技术相比,UWB定位技术具有时间分辨率高、抗多径干扰、穿透力强、系统简单、安全性好等优点。理论上,可以实现厘米级的定位精度,更适合室内封闭环境中的高精度定位服务[5]。
UWB技术在室内人员定位中的应用也面临许多挑战,例如,真实环境中的信号采集、多用户相互干扰、多径效应、非视距传播等[6?7]。文献[8]提出多基站测距和三角形质心算法,提高算法性能并解决多用户干扰问题。文献[9]提出了一种基于卡尔曼滤波的递归算法,可以有效提高时钟同步的精度。文献[10]研究了基于隧道内UWB定位系统的非视距识别以及消除。在文献[11]中,将自适应抗差滤波方法应用于UWB测距中的距离估计,消除了UWB测距误差。
在实际应用中,由于人员运动的多样性以及不规则性,使用UWB定位系统进行定位时,会产生异常的测距值。因此,UWB人员运动定位的结果受到影响,出现异常跳变点,定位精度变低,定位可靠性变差。
本文利用小波阈值去噪对UWB人员运动定位轨迹进行处理,削弱定位异常值的影响,得到更精确的定位结果。通过实验和仿真比较不同的小波基函数、阈值选取规则和阈值函数的去噪效果,最终选取最佳方案。
1 UWB测距和定位原理
常用的UWB定位方法主要有以下三种:基于信号到达角度(Angle of Arrival,AOA)、基于到达时间(Time of Arrival, TOA)和到达时间差(Time Difference of Arrival, TDOA)。本文采用基于TOA的方法进行定位。
1.1 UWB测距原理
TOA定位方法首先测量每个基站到标签之间传递信号的飞行时间(Time of Flight,TOF)。然后,將TOF乘以电磁波的传播速度,以计算每个基站到标签的距离。因此,信号飞行时间的测量成为测距的关键。单程测距(One Way Ranging,OWR)、双程测距(Two?Way Ranging,TWR)、非对称双边双向测距(Single?Sided Asymmetric Two Way Ranging,SSS?TWR)、对称双边双向测距(Symmetric Double?Sided Two Way Ranging,SDS?TWR)都是常用于TOA估计的测距协议。
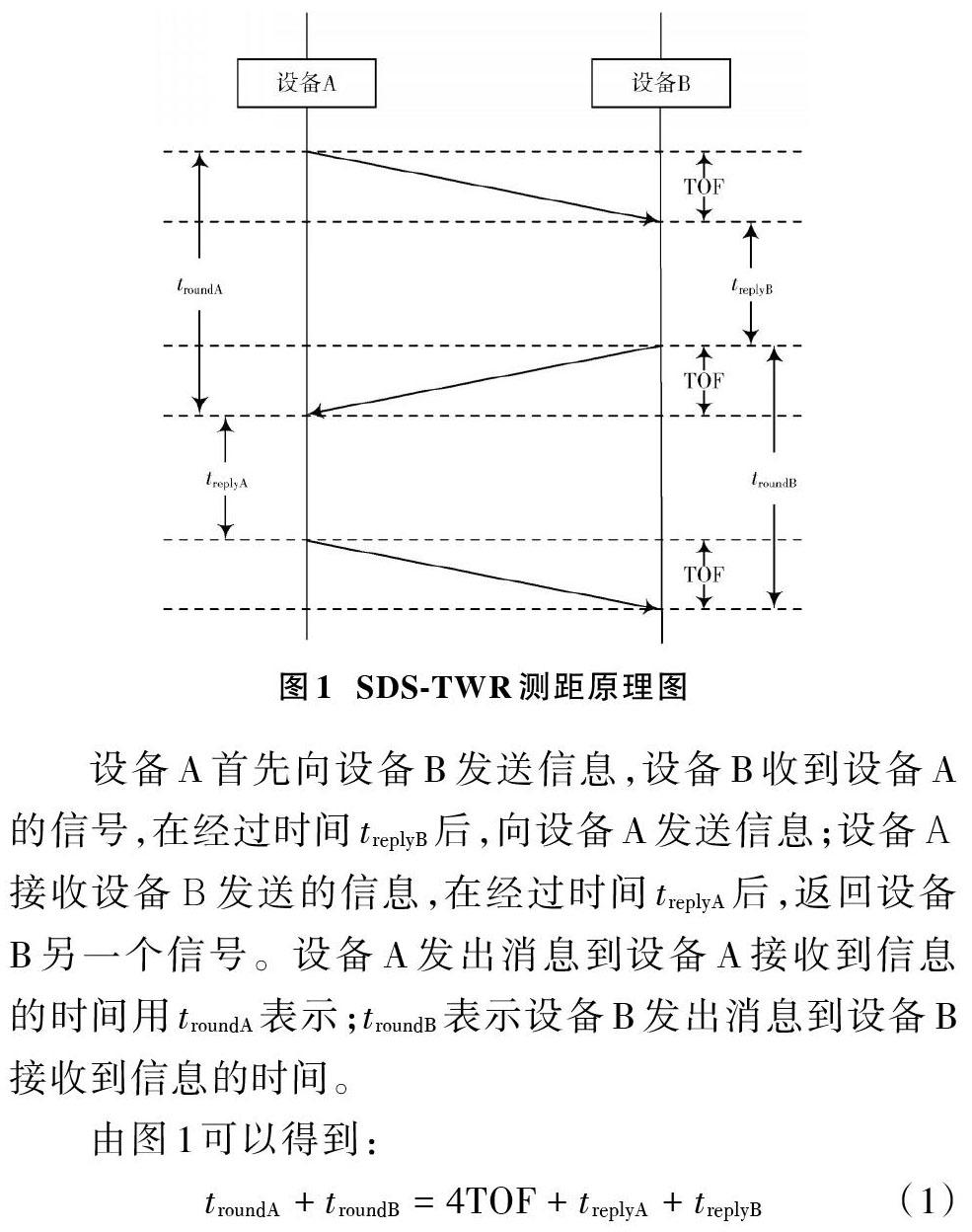
本文选用的UWB定位系统采用SDS?TWR测距方法测量标签与基站的距离,该方法为双向测距技术,能够尽可能地减少时钟漂移带来的测距精度误差,其信息交换原理如图1所示。
设备A首先向设备B发送信息,设备B收到设备A的信号,在经过时间[treplyB]后,向设备A发送信息;设备A接收设备B发送的信息,在经过时间[treplyA]后,返回设备B另一个信号。设备A发出消息到设备A接收到信息的时间用[troundA]表示;[troundB]表示设备B发出消息到设备B接收到信息的时间。
由图1可以得到:
SDS?TWR测距方法虽然比传统的TWR测距方法增加了一次信息发送,但是它能够降低由晶体时钟漂移引起的误差。同时,它不需要信号发送端和接收端时钟的绝对同步,这可以大大降低由多标签接入引起的同步复杂性。
基站与标签的距离为[d],其计算方法如下:
1.2 UWB定位原理
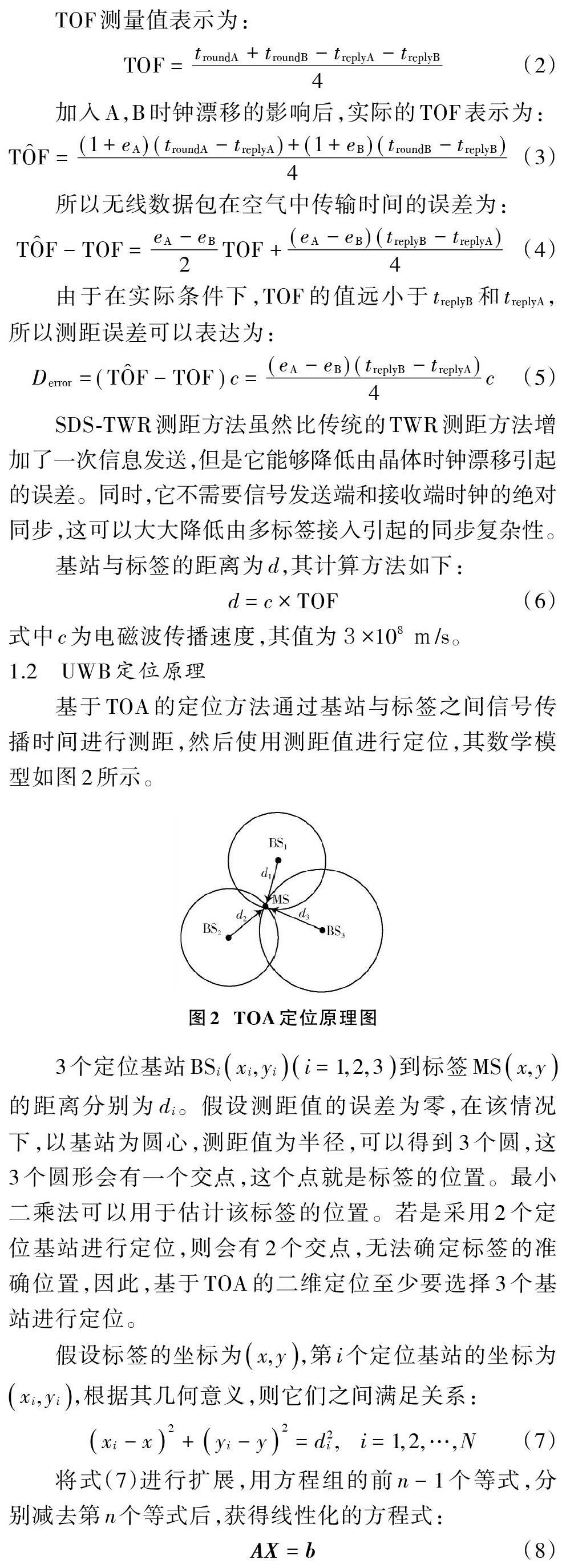
基于TOA的定位方法通过基站与标签之间信号传播时间进行测距,然后使用测距值进行定位,其数学模型如图2所示。
3个定位基站[BSixi,yii=1,2,3]到标签[MSx,y]的距离分别为[di]。假设测距值的误差为零,在该情况下,以基站为圆心,测距值为半径,可以得到3个圆,这3个圆形会有一个交点,这个点就是标签的位置。最小二乘法可以用于估计该标签的位置。若是采用2个定位基站进行定位,则会有2个交点,无法确定标签的准确位置,因此,基于TOA的二维定位至少要选择3个基站进行定位。
假设标签的坐标为[x,y],第[i]个定位基站的坐标为[xi,yi],根据其几何意义,则它们之间满足关系:
2 基于小波变换的去噪分析
2.1 小波变换
小波变换(Wavelet Transform,WT)是功能强大的信号处理工具,具有多分辨率特性,可以描述时域和频域信号的局部特征,适合处理具有瞬态突变特性的信号。
满足重构条件[cψ=ω-1ψω2dω<+∞]的函数[ψω],其所对应的时域函数[ψt]称为小波基函数,[ψt]通过伸缩和平移构成函数系,式(10)称为小波函数系:
2.2 小波基函数选取
小波基函数的选用需要与其特性相结合,根据经验方法确定,并且选用的标准不一致。小波基函数主要从支撑长度、消失矩、对称性、正则性以及相似性这些方面进行选用。因为不同的小波基函数进行信号处理时有不同的特点,所以在对不同类型的信号进行去噪时,要进行小波基函数的选用。
在本实验中,选用3种小波基函数:db5,sym5,coif5进行实验并对比结果。最后,根据人员运动定位轨迹的去噪效果,选择最适合UWB人员运动定位去噪的小波基函数。表1列出了本实验选用的3种小波基函数的特征。
2.3 小波阈值去噪
在信号处理领域,信号去噪是其中一个典型的问题。小波阈值去噪的方法具有计算简单、易于实现、效果好等优点。小波阈值去噪理论如下:经过小波分解,分解后对各层系数进行处理,系数的模大于或者小于某阈值,处理的方式不同;然后,对处理后的小波系数进行逆变换;最后得到重新构建的信号。
小波阈值去噪的过程如图3所示。
目前常见的阈值选择方法有:固定阈值估计、极值阈值估计、无偏似然估计以及启发式估计,常用的阈值函数有软阈值和硬阈值方法。
本文将分别选用极值阈值估计、启发式估计、硬阈值函数和软阈值函数的不同组合进行实验并对比。最后根据去噪效果选择最佳的组合。
3 实验与分析
本实验使用基于DW 1000芯片的UWB室内人员定位系统,定位误差为30 cm。DW1000芯片是Decawave公司在2012年推出的一款芯片,基于UWB技术,符合IEEE 802.15.4?2011标准。实验场景选择在6 m×6 m的空旷大厅,3个定位基站的坐标分别为:[A0](0,0),[A1](482,0),[A2](321,482),单位为cm。
实验内容包括以下4项:
1) 由人员佩戴UWB定位标签,根据设定的运动轨迹进行运动定位实验。
2) 对人员运动定位的结果进行小波去噪。分别选用db5,sym5,coif5这3种小波基函数,确定最合适的小波函数。
3) 进行阈值选则和阈值函数的选取,选用极值阈值估计、启发式估计、硬阈值函数和软阈值函数的不同组合,进行去噪实验并对比,确定最优的阈值函数。
4) 再次进行人员运动定位实验,测试人员按照新的测试轨迹行走,观察小波阈值去噪效果。
实验在人员运动的情况下进行测试。测试人员佩戴UWB定位标签,按照图4所示的测试轨迹行走。
导出人员运动定位的原始测试轨迹,然后使用db5,sym5和coif5这3种小波基函数分别进行去噪。人员运动定位原始轨迹和每个小波基函数去噪后的结果如图5~图8所示。
图5为使用db5小波基函数对人员运动轨迹进行小波阈值去噪的对比图;图6是使用sym5小波基函数对人员运动轨迹进行小波阈值去噪的對比图;图7为使用coif5小波基函数对人员运动轨迹进行小波阈值去噪的对比图;图8则为使用3种小波基函数进行小波阈值去噪,与原始人员运动轨迹的对比图。运动定位误差在图中主要体现为[y]轴方向的误差,将[x]轴坐标值视为准确值,对比去噪前和去噪后[y]坐标的值,确认运动噪声去除效果。经过实验验证,使用db5小波基函数时,由人员运动产生定位异常值的定位误差最小。异常定位点在[y]轴误差最大的定位点的[y]坐标去噪前后分别为104.8 cm和114.2 cm,与设定轨迹的[y]坐标值163 cm相比,经过去噪后误差由原来的58.2 cm变为48.8 cm。
在选用db5小波基函数后,进行阈值选取规则和阈值函数的选择,使用极值阈值估计、启发式估计、硬阈值函数和软阈值函数进行组合,对人员运动定位进行去噪实验,对比实验结果,确定最佳组合,去噪结果如图9~图13所示。
经过实验验证,由图13中这4种阈值处理方法的对比图可知:当小波基函数为db5时,采用启发式阈值选择,并且用软阈值进行去噪,由人员运动产生的定位异常值的定位误差最小。异常定位点在[y]轴误差最大的定位点的[y]坐标去噪前后分别为104.8 cm和117.4 cm,与设定轨迹的[y]坐标值163 cm相比,经过去噪后定位点最大的定位误差由原来的58.2 m变为45.6 cm。对人员运动过程中产生异常值的去除效果、平滑目标轨迹效果最好,且不会损失有用信息。
最后,再一次进行UWB人员运动定位实验,确保该方法可以用于不同的运动轨迹。测试人员按照图14所示的测试轨迹行走,然后按照最佳去噪方案进行小波阈值去噪,结果如图14所示。
从图14可以看出,人员运动定位的实验轨迹在进行小波去噪之后,与测试轨迹更加接近,证明了在不同的运动轨迹中,该小波阈值去噪方法都可以使用,能够去除定位结果中的异常值,使得人员运动轨迹更加平滑,而且不会在去噪的过程中损失有效的定位结果。
4 结 语
在UWB定位过程中,由于受到各种因素的影响,例如多路径效应、非视距条件、基站和标签的时钟漂移、天线硬件等产生的误差,导致测距值存在误差,这最终会使定位结果产生较大的偏差。而在人员运动定位的过程中,人员运动会引起测距异常,导致定位结果出现异常定位点。
本文将小波变换用于UWB人员定位中,然后利用小波变换对人员运动产生的定位结果进行去噪,最终确定了db5小波基函数的5层分解,在启发式阈值估计准则下,软阈值函数为最佳的去噪方案。
实验结果表明,经过小波去噪,能够削弱UWB室内人员运动定位中异常值的影响,提高定位精度与定位准确性。
参考文献
[1] 蔡赣飞,徐爱功,洪州,等.抗差容积卡尔曼滤波及其在UWB室内定位中的应用[J].测绘科学,2018,43(12):123?129.
[2] 陈小斯,沈重,周群,等.基于TDOA算法的差分UWB室内定位系统研究[J].现代电子技术,2018,41(6):45?49.
[3] 王明东,戴亚文,范俊,等.基于UWB技术的隧道无线定位方法研究[J].武汉理工大学学报,2016,38(8):56?60.
[4] 刘智伟,李建胜,王安成,等.基于运动捕捉系统的UWB室内定位精度标定方法[J].测绘科学技术学报,2017,34(2):147?151.
[5] 曾玲,彭程,刘恒.基于信号到达时间差的超宽带室内定位算法[J].计算机应用,2018,38(z1):135?139.
[6] 缪志敏,赵陆文,田世伟,等.类别不平衡学习识别UWB定位非视距信号[J].信号处理,2016,32(1):8?13.
[7] LING Jian, WANG Lei, JI Hong, et al. UWB?based real?time continuous positioning system in NLOS tunnel environment [C]// 2018 International Conference on Cyber?enabled Distributed Computing and Knowledge Discovery. Zhengzhou, China: IEEE, 2018: 142?1424.
[8] 魏培,姜平,贺晶晶,等.基于内三角形质心算法的超宽带室内定位[J].计算机应用,2017,37(1):289?293.
[9] 罗勃,沈重,朱雨豪.无线时钟同步算法在UWB定位技术中的研究与应用[J].现代电子技术,2017,40(6):31?34.
[10] SAVIC V, FERRER?COLL J, ?NGSKOG P, et al. Measurement analysis and channel modeling for TOA?based ranging in tunnels [J]. IEEE transactions on wireless communications, 2015, 14(1): 456?467.
[11] 刘韬,徐爱功,隋心.基于自适应抗差卡尔曼滤波的UWB室内定位[J].传感技术学报,2018,31(4):567?572.
