Delta并联分拣机器人的运动学分析及仿真
2020-09-08李佳玉彭见辉方永龄
李佳玉, 彭见辉, 方永龄
(东莞理工学院城市学院,广东 东莞523419)
0 引 言
并联机构的概念于1931年在Gwinnett的申请专利中首次提出[1];澳大利亚学者Hunt[2]于1978年第一次将这种与人体结构相似的并联机构命名为并联机器人,由此并联机器人正式从并联机构中衍生出来[3]。此后,并联机器人成为越来越多的专家学者在机器人领域研究的重点,结构形态各异、用途各不相同的并联机器人相继问世。国内第一台六自由度并联机器人在1991年诞生于燕山大学[4],随后黄真教授编写了国内首部并联机器人相关理论与技术的著作,由此开启了国内对于并联机器人的研究。1985年,瑞士学者Clavel[5]首次提出了一种非常典型的空间三自由度并联机器人,被命名为Delta机器人,该机器人拥有三个平动的自由度,此后绝大多数的空间三自由度并联机构均是由Delta机器人演变得到的。
随着控制技术的不断发展,并联机器人被广泛应用于航空模拟仿真器、不同类型的工业分拣、搬运等领域。
1 并联机器人的机械结构设计
本文以典型的3-RSS型Delta并联机器人为研究对象,其结构主要包括上部静平台、下部动平台、3个主动臂、3个由平行四边形组成的从动臂、驱动电动机,具体结构如图1所示。
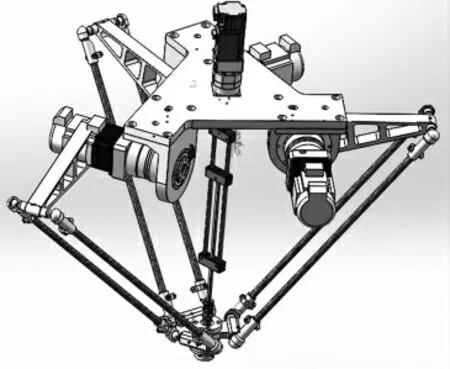
图1 Delta并联机器人结构图
上部静平台的三边与下部动平台的三边通过三个相同的运动链连接,其中一个运动链的组成如下:驱动电动机通过法兰盘安装在上部静平台,驱动电动机输出端与主动臂大端相连,主动臂小端与从动臂(由4个球铰链、4个杆件组成的平行四边形闭环组成)以转动副连接,从动臂的另一端与下部动平台以转动副相连。每条运动链在驱动电动机的带动下以一定角度摆动,在三条运动链的共同作用下,下部动平台即可达到不同的工作位置。
该并联机构具有局部冗余自由度,因构成从动臂的两个长杆两端均为球铰链,这两个长杆均可绕自身轴线转动,在计算并联机构自由度时应将从组成动臂的4个球铰链中的2个按虎克铰链计算,以消除局部自由度的影响。按照空间机构的自由度计算公示Kutzbach-Grubler[6]:

即该并联机构下部动平台具有3个自由度。
2 并联机器人工作位置分析
2.1 工作位置反解分析
本文针对并联机器人的工作位置反解问题进行研究,即已知下部动平台在某一空间固定位置时,求解3个驱动电动机的运动角度问题。
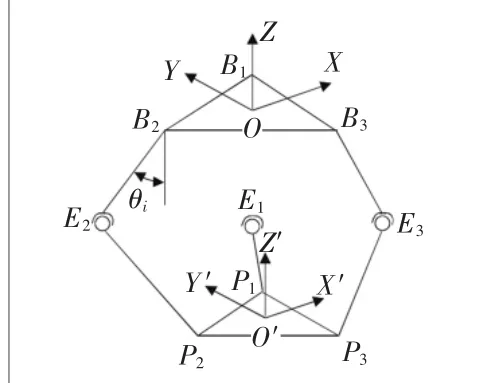
图2 Delta并联机器人的机构简图
根据Delta并联机器人的结构及工作过程,作出该其机构简图,如图2所示,其中上部静平台为B1B2B3,下部动平台为P1P2P3,B1E1P1、B2E2P2、B3E3P3为3条相同的运动链。分别在静、动平面建立以O为中心O-XYZ和O′为中心O′-X′Y′Z′的笛卡尔坐标系,上部静平面半径为Bi,下部动平面半径为Pi,主动臂的长度BiiEi为L,从动臂的长度EiPii为l,主动臂与竖直方向之间的角度为θ。
2.2 工作位置反解数例计算
按照以上推导过程及公式,若已知并联机器人的各种结构参数,即可根据动平台基准坐标系O′-X′Y′Z′的O′来通过反解来计算出主动臂与竖直方向之间的夹角θi。
将式(6)的方程解组Ai、Bi、Ci写出编程中,根据式(9)、式(10)得出结果。其结果再从MATLAB角度参数转化为几何角度参数。
已知静平面的半径R=240 mm,动平面的半径r=100 mm,主动臂长度为L=300 mm,从动臂长度为l=600 mm。而当动平面坐标系O′-X′Y′Z′的O′坐标相对于坐标系OXYZ到达一个位置为(30,30,-350),通过MATLAB仿真出反解答案:θ1=20.2154,θ2=15.0153,θ3=1.6598。
2.3 工作位置正解分析
为更好地对并联机构进行工作位置正解分析,在3条从动臂的上下两侧中点之间增加3根虚拟连杆,考虑到下部动平面只是平移而没有旋转,因此动平面平行于静平面,如图3所示。
3个从动杆PiiEi分别沿O′Pi平移,并交汇于动平台中心O′。当设定出驱动角度时,推动杆就会运动,因为已知推动杆长度L,因此知道Ei点所在位置。PiiEi的矢量和Ei所平移的点B、C、D就很容易得出。至此,正解的求法就演变成三棱椎A-BCD的顶点A的求取。
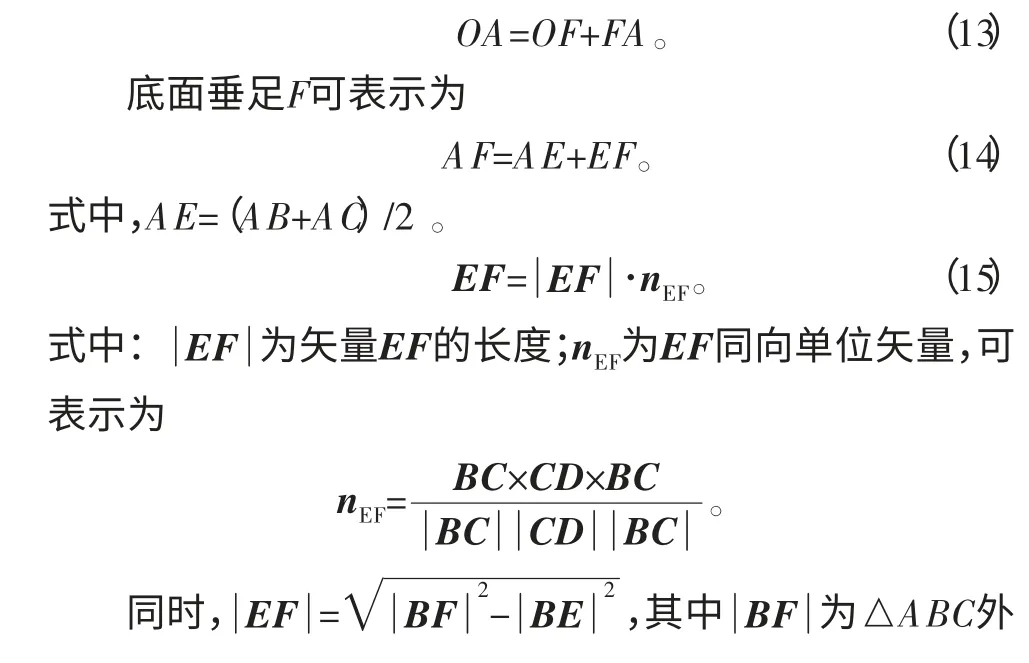
动平面的圆半径为r,则得出3个平移矢量O′P1、O′P2、O′P3坐标矢量由式(3)可得:
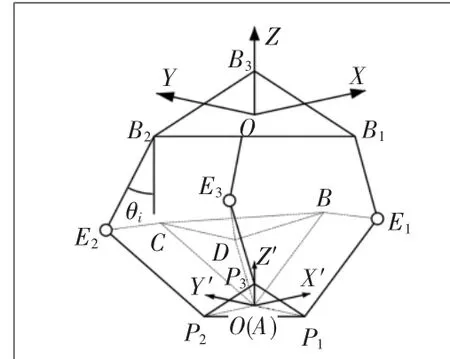
图3 运动学简化空间结构
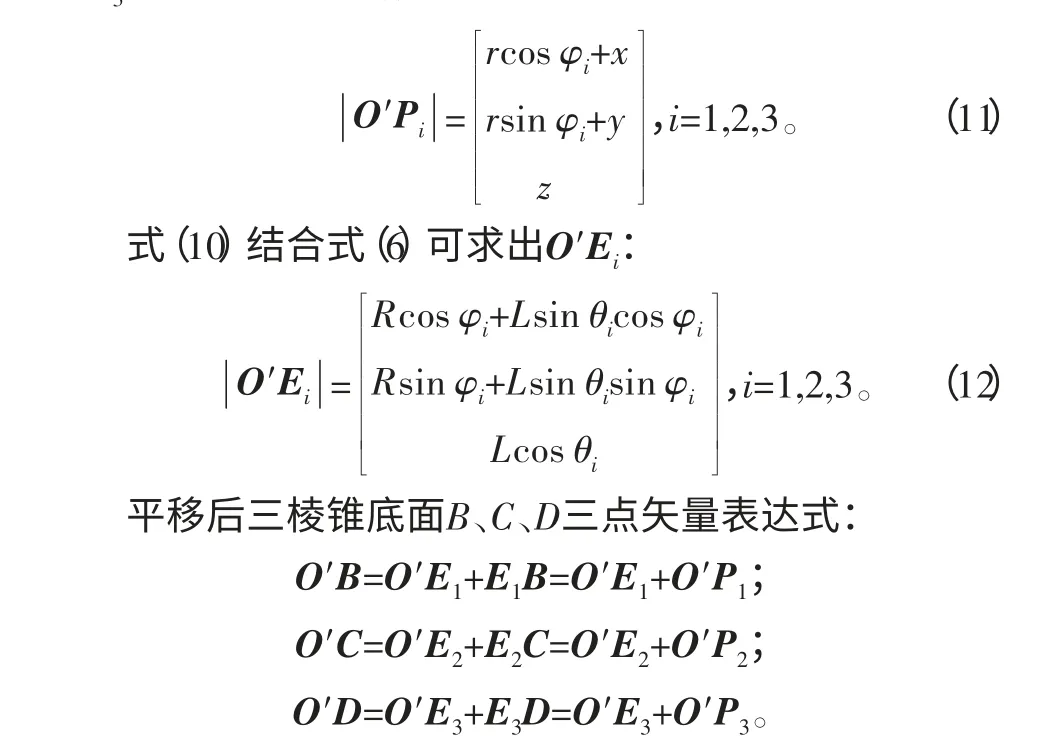

表1 输入的张角
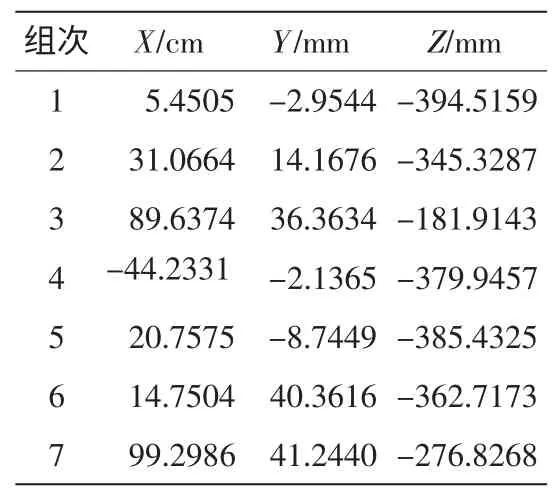
表2 输出A点的空间坐标
到此正解的求法就演变成三棱椎A-BCD的顶点A的求取问题。如图4所示,解决这一问题的过程,先求出A点到底面的垂足F,后求出垂线AF的矢量从而得出A点的坐标,BC边的中点为E。
第一步,推出F点为三角形BCD外心。假设F 点为三角形BCD外心,因为E点为BC中心,所以EF垂直BC。并且因为三角形ABC为等腰三角形,所 以AE 垂 直BC,AF垂直BC,AF垂直CD。因此AF垂直于整个底面BCD。
因为动静平面平行,所以得出

图4 等效运动学模型

知道了OF和FA大小,由式(13)就可求出A点坐标,即可得出位置正解所想要的结果。
2.4 工作位置正解数例计算
运用MATLAB仿真软件能快速求出结果,编正解程序,能快速验证空间结构是否正确。已知参数与2.3节中计算参数一致。解3个非线性方程的方程组,其计算结果如表1、表2所示。
3 并联机器人工作空间仿真
3.1 蒙特卡洛法
1)在MATLAB仿真软件中,函数rand可定义输入量在一定的范围内变化,公式如下:

2)将函数rand随机得出的量定义带入到A点位置方程(即式(13))中,得到大量的工作空间坐标。
3)利用函数即可求得并联机器人末端A点所能到达的空间坐标构成的工作空间图。
3.2 DELTA机器人工作空间仿真
机器人定义参数如下:静平面半径R=240 mm,动平面半径r=120 mm,推动杆L=300 mm,从动杆l=600 mm。3个输入变量θi定义范围为30°~120°,函数设定rand(10000,1),在一定范围内得出10 000个随机变量。并联机器人末端A点的工作空间及其在xoy、xoz、yoz三面上的投影如图5~图8所示。
从图中可以看出,在已知参数下,x最长可达630 mm,y最长可达600 mm,而x有着70 mm高度的工作空间。因此可以广泛应用于生产线上,能够快速完成分拣和搬运工作,工作准确可靠,生产效率高,是一种理想的工业机器人。
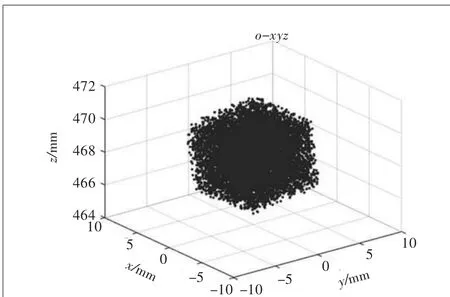
图5 喷枪三维工作空间
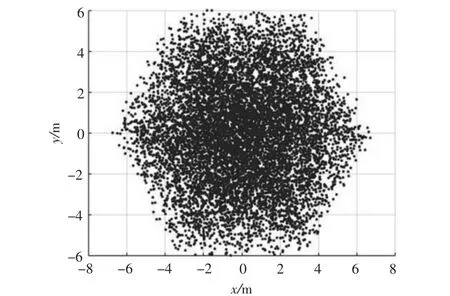
图6 工作空间xoy面投影
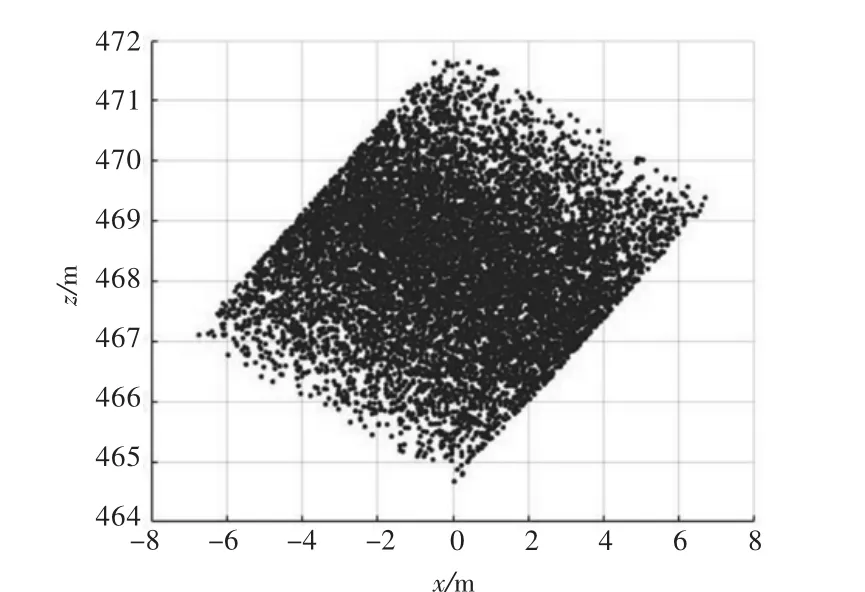
图7 工作空间xoz面投影
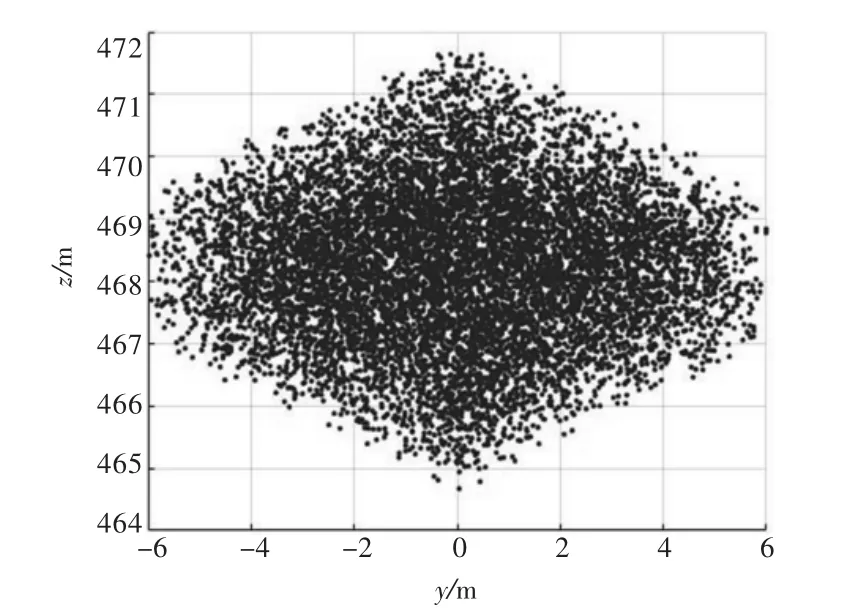
图8 工作空间yoz面投影
4 结 语
本文针对Delta并联分拣机器人进行了结构设计,推导了机器人工作位置的正逆解方程,采用MATLAB进行了正逆工作位置方程的求解,并对该机器人执行器末端工作空间进行了运动学仿真,得到了并联机器人的工作空间,对Delta并联分拣机器人的运动控制具有较为重要的参考意义。
