成都地铁市域快线车辆电气牵引系统
2020-09-02曾东亮
曾东亮
(成都地铁运营有限公司, 成都 610051)
成都地铁17、18号线是成都地铁线网中首次建设的两条市域快线,车辆采用A+型车,6动两拖(6M2T)8辆编组,如图1。列车采用交流25 kV供电制式,电气牵引系统采用交-直-交供电方式和变频变压(VVVF)的变流器控制技术,具有良好的空转/滑行控制功能,采用电制动优先、空气制动补足的电空混合制动方式。与普通地铁车辆直-交的供电方式相比,该系统的特点主要表现在系统结构设计、高压系统设备及牵引控制等方面。

图1 车辆编制图
车辆主要技术参数:
在额定载员情况下,在平直干燥轨道上,车轮为半磨耗状态,额定供电电压时,平均加速度为:
(1)列车从0加速到50 km/h: ≥1.0 m/s2
(2)列车从0加速到140 km/h: ≥0.5 m/s2
在额定载员情况下,在平直干燥轨道上,车轮半磨耗状态,列车在最高运行速度140 km/h时,从给制动指令到停车,平均减速度为:
(1)最大常用制动: ≥1.0 m/s2
(2)紧急制动: ≥1.2 m/s2[1]
AW3工况下列车牵引、制动曲线图如图2:
1 市域快线电气牵引系统差异性特点
与普通地铁直-交供电方式相比,成都市域快线的牵引系统主要有以下差异性特点:
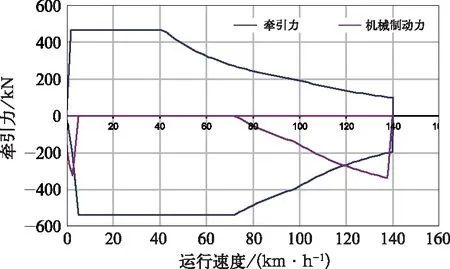
图2 AW0牵引、制动特性曲线
(1)采用交-直-交的供电方式将AC 25 kV单相交流电通过降压、整流、逆变等方式转换为变频调压的电源或稳定的AC 380 V电源;
(2)交流供电方式决定了运行时只能单弓受流;
(3)新增了用于降压的牵引变压器及控制箱,用于整流的网侧变流器以及适用于高压的电压、电流互感器等高压设备;
(4)取消原设置于每节车的高压断路器,每个单元增加了主断路器和高压隔离开关,分别用于向列车高压供电和在有故障的条件下激活冗余设备;
(5)采用车控方式,每套牵引变流器单元给一辆动车上的4台牵引电机供电;
(6)增强了冷却方式,牵引变流器首次采用水冷与风冷的混合冷却方式确保变流器工作在稳定的温度环境中。
2 市域快线电气牵引系统构成
市域快线列车AC 25 kV的供电制式是其牵引系统相比于普通地铁车辆牵引系统结构和功能设计变化的主要原因,因此本线路除车辆的机械驱动子系统与普通地铁车辆相似外,其高压系统、牵引辅助系统、控制系统与普通地铁车辆相比差异性特点明显。
该牵引系统由两个基本动力单元组成,单元内的电气设备发生故障时,可通过高压隔离开关隔离一个单元,减少故障对整列车的影响。图3是一个牵引系统的基本单元。
市域快线牵引系统的电能转换过程如下:
①来自接触网的AC 25 kV交流电压经受电弓、高压回路、牵引变压器输入到各变流器,其中牵引变流器为牵引电机提供变频变压的交流电源;
②每个牵引变流器配置一个牵引控制单元,牵引控制单元将列车控制变量和控制指令转换成牵引变流器的控制信号,对牵引变流器和牵引电机进行控制(列车速度调节、保护、变流器脉冲模式的产生等)。
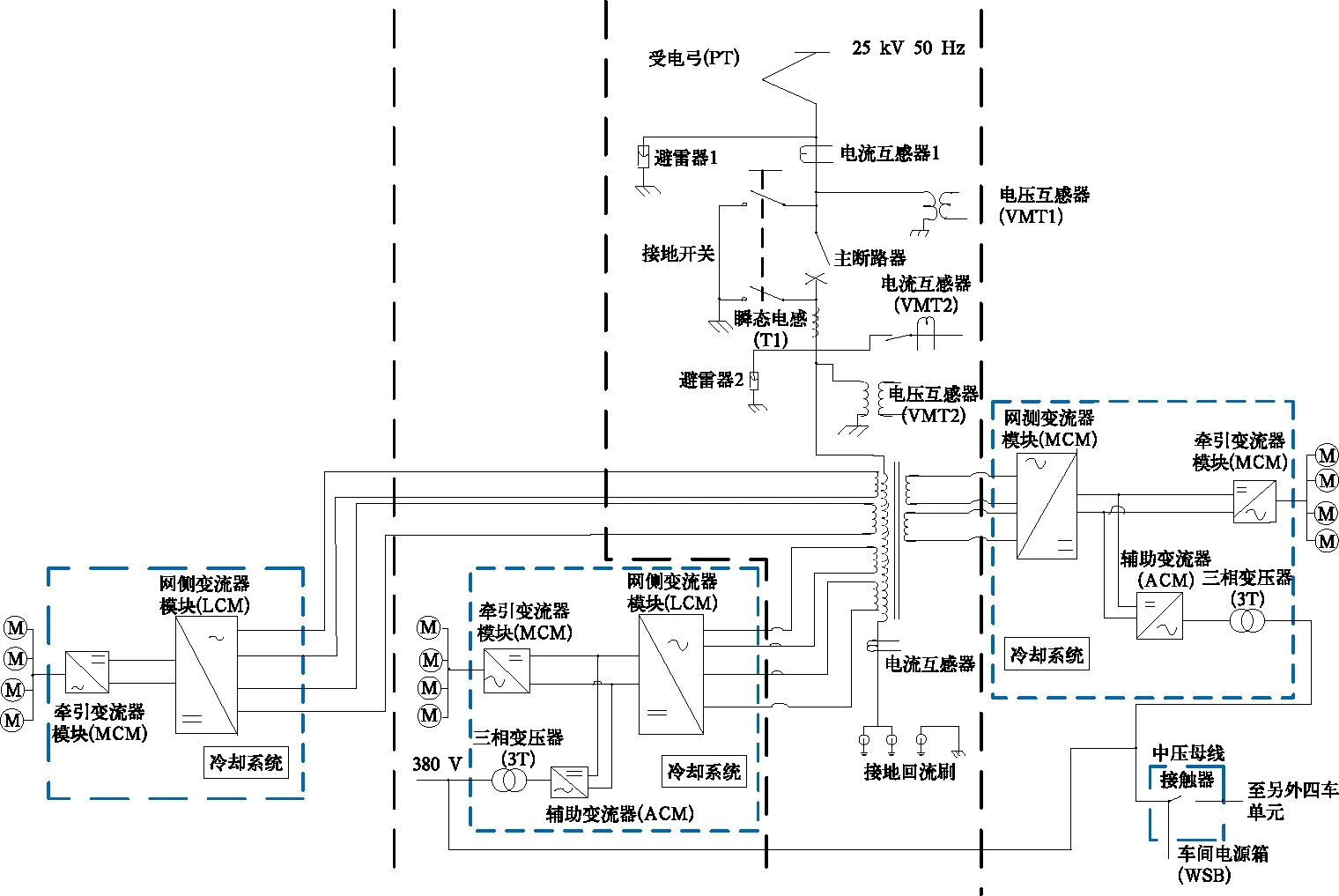
图3 牵引系统(半列)电气原理图
2.1 高压系统
市域快线车辆高压系统设备与普通地铁车辆相比,设备耐压等级高、设备种类多。除受电弓、避雷器外,新增了电流互感器、电压互感器、主断路器、高压隔离开关等设备,替代普通地铁车辆的熔断器设备,增强设备的过压过流保护性能。如图4是其中一个单元的高压系统,其主要特点及功能如下:
(1)受电弓单弓受流,另一台备用。
(2)主断路器对高压侧主回路进行开关和隔离保护。
(3)电压互感器和电流互感器分别监测网侧的电压和电流,主要为主断路器和高压隔离开关的控制提供监测信号。
(4)25 kV母线设置高压隔离开关,当发生接地故障时,用于隔离故障。
(5)在每台牵引变压器前设置瞬态电感器,利用其阻碍电流变化的特性,用于避免主断路器在关闭瞬间的涌流对牵引变压器等后端设备的影响。
(6)在两辆Tp车设置车载自动过分相装置及车载感应器。当车辆通过分相区时,过分相装置根据地面磁钢位置自动发出过分相信号,封锁牵引指令、随后自动分断主断路器,通过分相区后,自动闭合主断路器、启动牵引,从而自动实现车辆通过分相区。
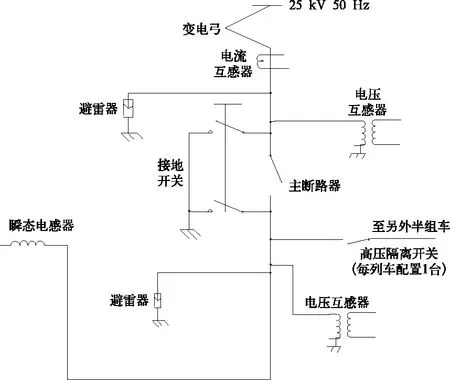
图4 半列车的高压系统
2.2 牵引系统
市域快线的牵引系统在普通地铁车辆原有的牵引变流器、辅助变流器基础上,增加了牵引变压器、网侧变流器及变压器控制箱。
2.2.1牵引变压器
牵引变压器将AC 25 kV高压降为适合网侧变流器的输入电压(AC 950 V),同时变压器也作为车辆高压系统和牵引系统之间的电隔离。牵引变压器主要由1个原边绕组和6个牵引绕组构成(如图5)。变压器采用油冷却方式,冷却设备由油泵、热交换器和风机组成。变压器控制箱(TCB)通过数字/模拟输入输出单元(DX/AX)控制牵引变压器冷却设备(泵、风扇)和高压设备(主断路器、高压隔离开关),并通过输入输出单元向列车TCMS及牵引控制系统提供监控数据。
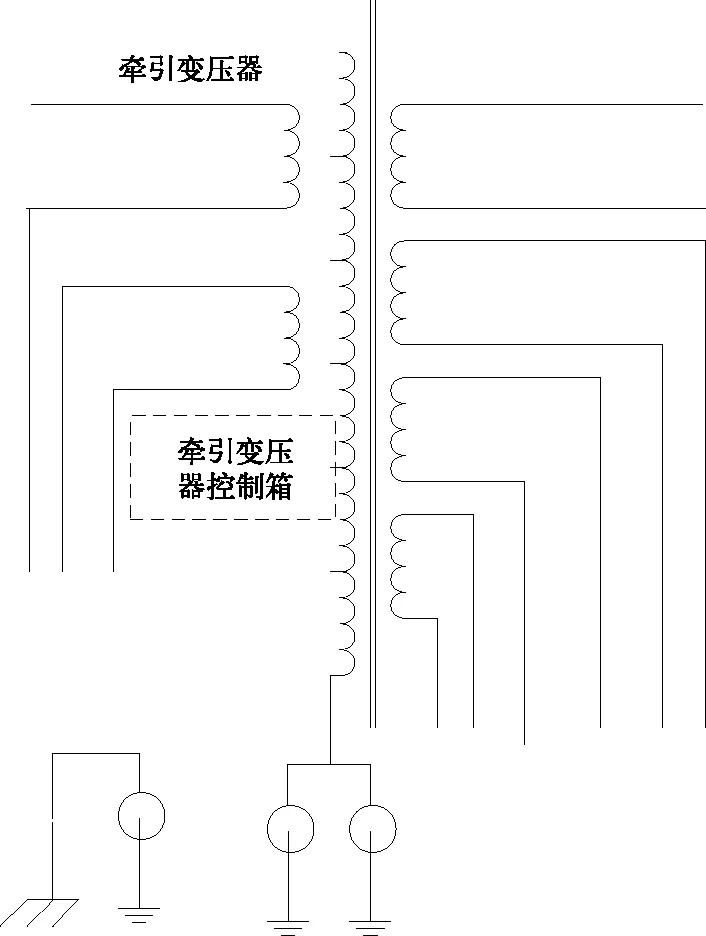
图5 牵引变压器绕组示意图
2.2.2变流器单元
市域快线列车的牵引变流器单元高度集成在一个牵引箱体内,主要分为网侧变流器模块、牵引变流器模块、辅助变流器模块及冷却单元。
(1) 网侧变流器
网侧变流器(LCM)将牵引变压器降压后的单相50 Hz交流电压整流为直流电压,在牵引和再生制动期间将直流母线电压控制在直流1 500~1 800 V之间。网侧变流器由并联连接的两个自换向IGBT模块桥组成,每个桥连接到6绕组牵引变压器上的1个绕组,如主电路图6所示。
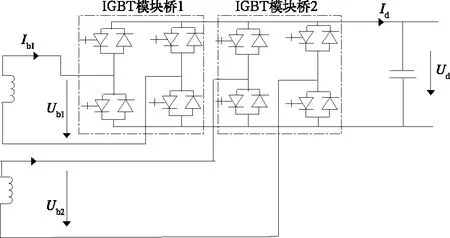
图6 LCM整流原理图
(2)牵引变流器模块
牵引变流器(MCM)采用六脉冲三相逆变器原理把中间直流电压变为可变频调压的三相输出电压(VVVF),为三相异步电动机供电。
牵引变流器的电源转换采用基于微处理器控制逻辑的IGBT,变流器控制器以一定的顺序控制IGBT的导通和关断,通过PWM斩波改变IGBT的导通和关断时间,即改变IGBT的占空比,得到不同的输出频率和电压,使输出端获得三相交流电压[2],如图7。

图7 牵引变流器(MCM)逆变原理图
(3)辅助变流器模块
辅助变流器(ACM)从网侧变流器(LCM)中间直流回路取电,经过逆变、降压和滤波后输出三相AC 380 V 50 Hz,为空调系统、主空压机、牵引系统冷却风机等设备供电。充电机从辅助变流器输出的三相AC 380 V取电,经过整流、降压和滤波后输出DC 110 V,为控制系统、照明、影视广播等设备供电;24 V电源模块将DC 110 V转化为DC 24 V为24 V设备供电;单相AC 220 V从三相中某一相与中线之间取电,为插座等设备供电。
市域快线车辆采用4台辅助变流器并网供电的方式,正常情况下4台辅助变流器并联在三相四线AC 380 V母线上,向全列负载供电;当1台辅助变流器发生故障时,通过切断故障辅助变流器的输出接触器将其隔离,其余3台正常供电,所有用电设备均可正常工作;当2台辅助变流器故障时,通过切断故障辅助变流器的输出接触器将其隔离,其余2台正常供电,空调系统按辅助变流器能力损失情况进行减载,其他负载正常工作。
(4)冷却系统
由于变流器高度集成在一个箱体内,发热量较大,因此本线路车辆牵引系统首次采用了水冷+风冷的混合冷却系统。冷却模块位于牵引箱冷却前段装置中,由风机、水泵、热交换器器和膨胀容器组成,其中热交换器为空气-水热交换器。风冷和水冷同时对箱体内设备进行混合冷却,对于箱体内发热量较大的LCM、MCM及ACM主要为水冷,其余设备为强迫风冷。
3 牵引控制系统
3.1 控制系统构成
牵引控制系统主要实现对网侧变流器、牵引/辅助变流器、变压器控制箱的控制及高压部件(受电弓、主断路器、高压隔离开关)的协调控制(其中受电弓、高压隔离开关、主断路器的控制还属于列车TCMS控制的一部分)。控制系统由牵引控制单元(PCU)、网侧变流器驱动单元(DCU/L)、牵引变流器驱动控制单元(DCU /M)、辅助变流器驱动控制单元(DCU/A)、模拟输入输出单元(AX)、数字输入输出单元(DX)以及用于诊断存储的中央诊断单元(CCU-D)组成,其中网侧变流器驱动单元(DCU/L)中集成了牵引控制单元(PCU)。各单元使用标准化的MVB(多功能车辆总线)与车辆TCMS系统通信。
图8为半列车的牵引控制架构:
3.2 控制特点
市域快线的牵引控制系统采用分级控制的分布式控制方式,如图8所示,PCU接受来自列车TCMS网络的指令后,经过内部运算和控制量的分配,实现对各DCU及牵引变压器控制箱(TCB)的控制。全列车6个PCU中参与TCB的4个PCU互为冗余,在任意时刻通过列车主控端及单双日启动确定唯一的主PCU。
其中DCU/L控制网侧变流器,将其从牵引变压器馈送的AC电流转换为牵引变流器使用的稳定直流链电压;DCU/M以一定的顺序控制牵引变流器(MCM)中IGBT的导通和关断,使输出端获得三相变频变压的电压;DCU/A以一定的顺序控制牵引变流器(MCM)中IGBT的导通和关断,使输出端获得稳定的三相380 V电压;变压器控制箱(TCB)通过数字/模拟输入输出单元(DX/AX)控制牵引变压器冷却设备(泵、风扇)和高压设备(主断路器、高压隔离开关),并通过输入输出单元向列车TCMS及牵引控制系统提供监控数据。
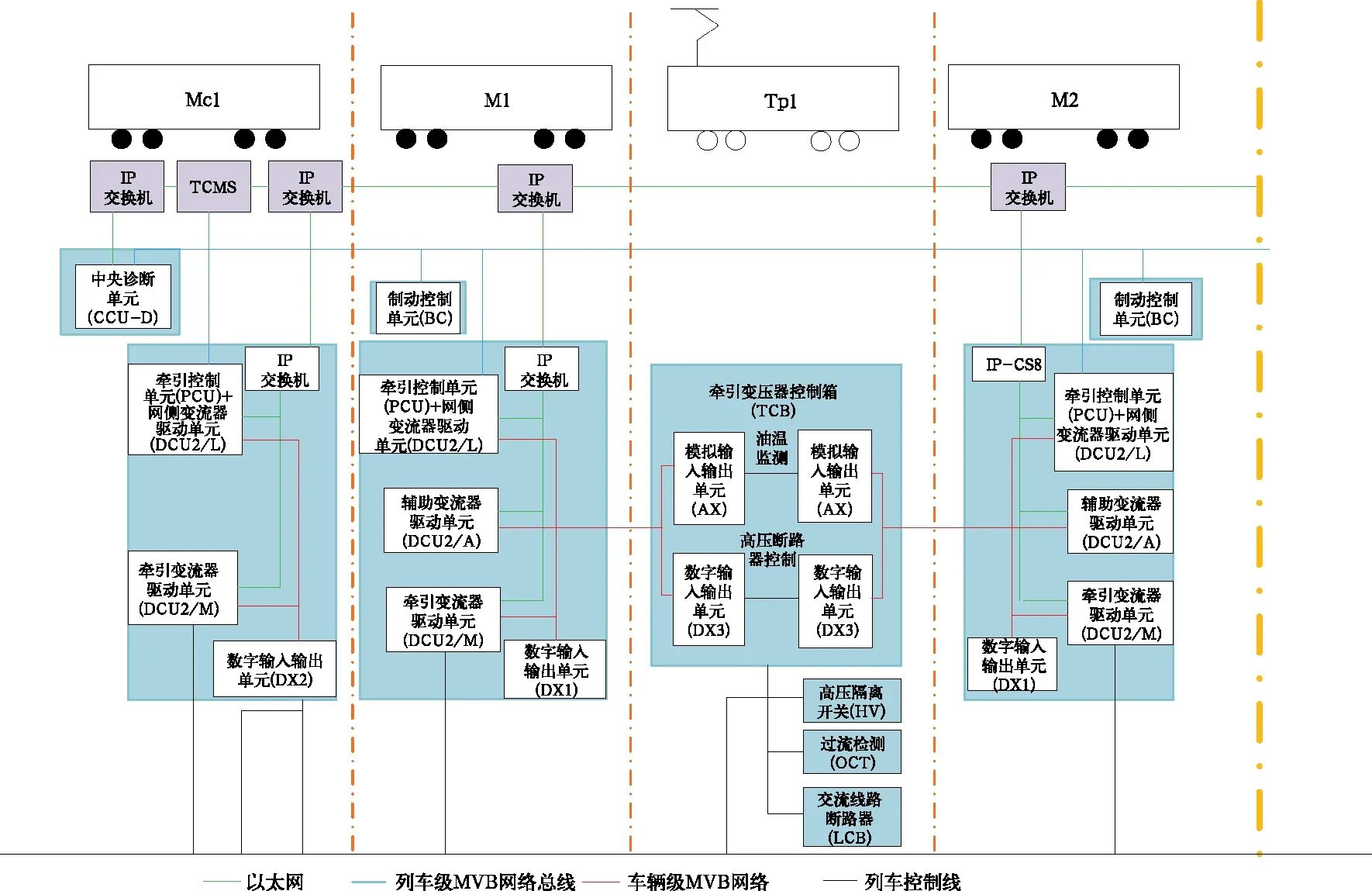
图8 半列车的牵引控制系统
3.3 系统诊断功能
各DCU还兼有对各自控制模块的故障诊断功能,可将诊断信息作为过程数据发送到TCMS网络上。为了提高牵引和辅助供电系统的诊断能力,牵引系统设置两个互为冗余的牵引辅助故障诊断单元(CCU-D),并直接连接在列车级MVB上,用于记录和储存各DCU的实时诊断数据。
3.4 防滑防空转控制
防滑—防空转控制的目的是当轨道和车轮之间的黏着系数达不到所要求的牵引力时,在减少牵引/制动力尽快恢复黏着的同时,获得尽可能高的牵引力/制动力[3]。
防滑—防空转控制主要通过DCU/M来控制牵引电机的扭矩,在牵引模式下改变牵引力,在制动模式下改变电制动力。防滑防空转控制检测动轴的速度,当探测到车轮在牵引模式下的空转和动态制动模式下的滑行时,减小牵引变流控制中的牵引力参考值直到空转或滑行停止。
如图9所示,成都地铁市域快线的防滑-防空转控制采用PID控制技术,牵引系统在DCU/M中预设防滑-防空转速度临界值及空转加速度临界值,通过速度传感器检测车轮速度及加速度,并向DCU/M反馈以调整电机扭矩。
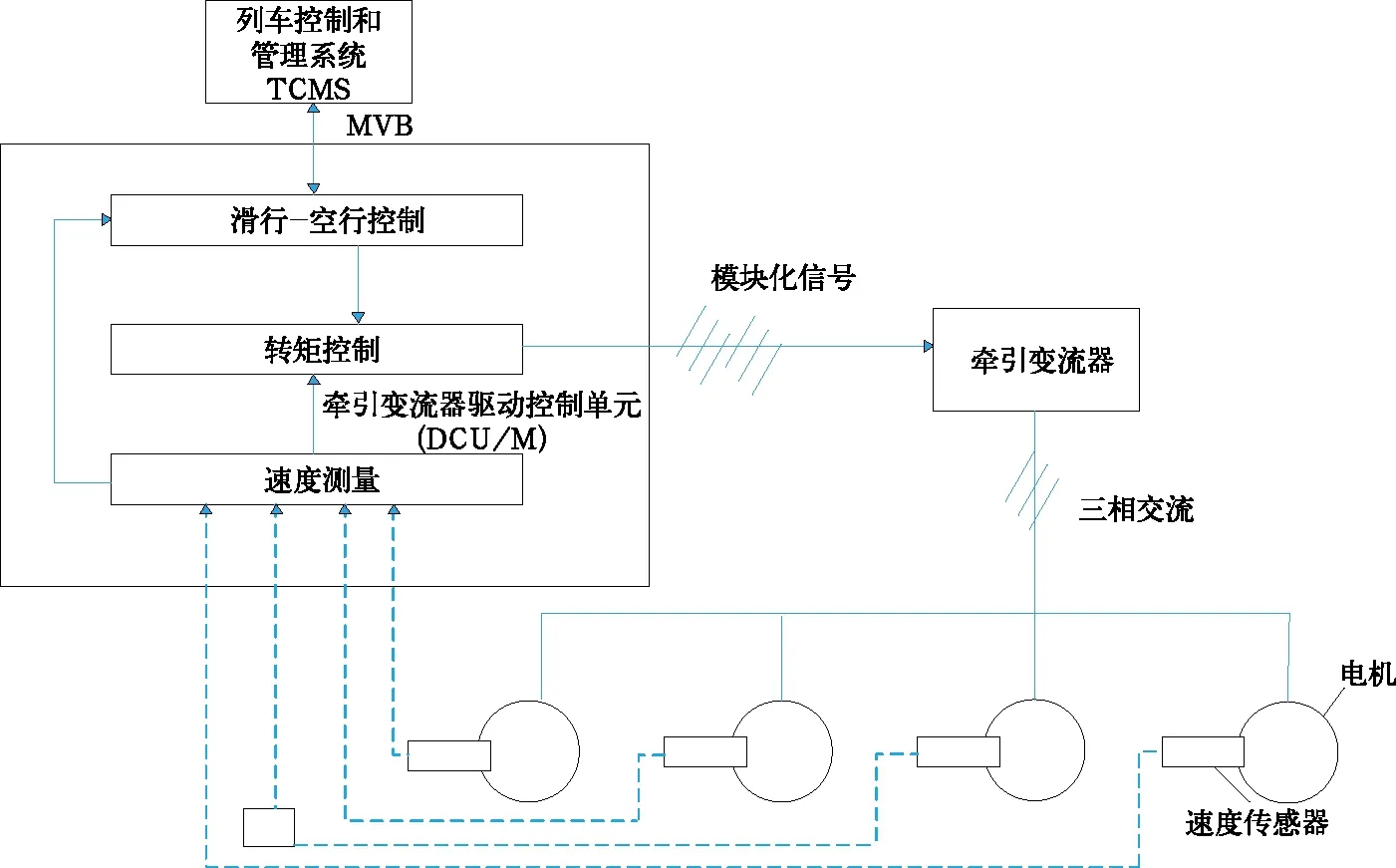
图9 滑行、空转控制原理
3.5 电、空制动力混合控制
本线路列车的电、空混合控制采用等磨耗控制策略。列车运行时,优先使用电制动,当电制动功率不足时,制动控制单元计算需要空气制动补偿以达到需要的制动力[4]。TCMS系统计算总的制动力需求,将制动力需求计算后根据电制动状态分配给牵引系统,牵引变流器驱动控制单元(DCU/M)把实际发挥的电制动力反馈给TCMS,TCMS计算总的实际发挥电制动力;TCMS把总制动力需求与实际发挥的电制动力的差值发送给制动系统,由空气制动系统平均分配到每个转向架,如图10。
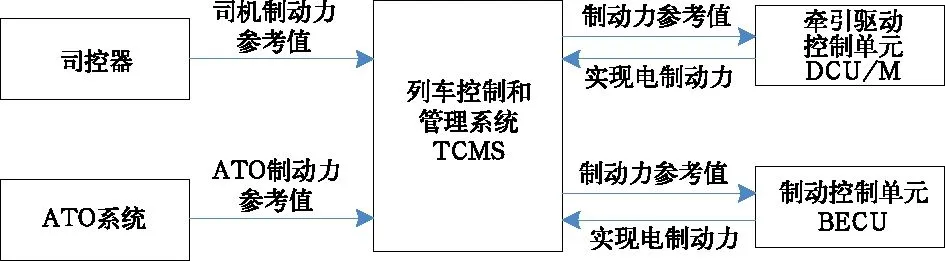
图10 电、空转换控制原理
4 结束语
目前,成都轨道交通17/18号线市域车辆已完成了各项调试和试验,调试中验证了牵引系统控制逻辑和方案合理,试验结果显示其各项功能及性能指标满足合同要求;正常情况下主断路器(LCB)闭合需要同时满足的条件共有11条,需重点验证LCB在故障场景下的可用性及可靠性;对于首次采用的变压器油冷、变流器水冷冷却方式,需重点关注油冷和水冷系统的可靠性和密封性。