轨道不平顺对悬挂式货运单轨车辆动力行为影响分析
2020-09-02李忠继林红松吴波文
李忠继, 林红松, 吴波文
(1 中铁二院工程集团有限责任公司, 成都 610031;2 西南交通大学 机械工程学院, 成都 610031)
悬挂式单轨车辆是一种城市快速轨道交通系统。悬挂式单轨车辆相较于传统的轨道交通系统,具有占地面积小,成本较低,无脱轨风险等优势得到了越来越多的重视。世界各国对悬挂式单轨车辆已开展了大量的研究。文献[1-2]综述了德国多特蒙德的悬挂式单轨车辆系统的结构、运行方式和主要特点。文献[3-8]综述了日本及其他国家悬挂式单轨车辆系统的发展和应用情况。
轨道不平顺是轨道交通系统振动和噪声的来源之一。其对传统式轨道交通系统动力学行为的影响,已进行了充分的研究。文献[9]研究了轨道不平顺对动车组车辆安全限速的影响。文献[10]研究了钢轨焊接接头不平顺对重载车辆轮轨动态作用的影响。文献[11]研究了不平顺幅值和波长对高速动车组动力学行为的影响。
悬挂式货运单轨轨道系统不平顺主要是由于轨道梁施工制造误差、残余变形累计,后期运营时墩柱的不均匀沉降,以及车辆动作用产生的结构变形所造成的。悬挂单轨轨道轮轨作用机理与传统轮轨有所不同,车辆系统拓扑结构、悬挂参数与传统轨道车辆区别也较大,轨道不平顺对悬挂式单轨车辆动态性能影响规律尚无系统的研究成果见诸文献,在工程设计和运营维护中对轨道不平顺控制缺乏有效的理论依据。
使用多体系统动力学理论建立悬挂式货运单轨车辆-轨道系统动力学模型,使用线性分析方法计算了车辆系统的振动频率以及对应的敏感波长,使用非线性动力学方法计算了不同轨道不平顺下悬挂式单轨车辆的动力学响应,分析了不平顺幅值和波长对车体加速度和轮轨动作用力的影响规律,为轨道的加工制造以及维护养护提供一定的理论参考。
1 理论与模型
1.1 轮轨接触模型
采用基于弹性地基梁的Fiala轮胎模型来描述驱动轮和导向轮与轨道间的力学行为[12]。轮胎与轨道间的法向接触力FZ可表示为式(1)
(1)
式中kZ为实心橡胶轮胎的法向非线性刚度函数;Δr、dz和VΔr分别为轮胎法向挠度,实心橡胶轮胎阻尼和轮胎垂向变形率。
轮胎纵向力Fx可表示为式(2)
(2)
其中,
(3)
式中sx,sy分别为纵向蠕滑率和横向蠕滑率;cx为纵向蠕滑刚度;μ0,μ1分别为静摩擦系数和动摩擦系数。
轮胎横向力Fy可表示为式(4)

(4)
轮胎滚动阻力为式(5)
(5)
式中,rt为轮胎环形半径。
1.2 车辆—轨道多体动力学模型
利用多体动力学软件建立悬挂式单轨车辆—轨道系统动力学模型,如图1。模型将车辆系统考虑为多刚体系统,共包含25个刚体,60自由度,见表1。

图1 悬挂式单轨车辆—轨道多体系统动力学模型

表1 车辆系统自由度
2 车辆系统振动频率分析
使用模态分析法计算车体系统的振动频率、阻尼比,结果如表2。由表2可知,车体横向振动振型主要有车体上心摆、车体摇头和车体下心摆动,频率分别为0.31 Hz,1.49 Hz,1.95 Hz。对应的阻尼比分别为0.23%,1.36%,2.08%,阻尼比不足5%,接近于无阻尼状态,因此本阶振动在车辆运行中收敛速度较慢,在遇到持续周期激励的条件下容易发生共振。3种振型在车速15~30 km/h的条件下对应的敏感波长范围分别为13.44~26.88 m、2.78~5.59 m和2.14~4.27 m。引起车体垂向振动的振型主要为车体点头和车体浮沉,对应的振动频率分别为2.86 Hz和2.48 Hz,对应的敏感波长范围为1.46~3.36 m和1.68~3.36 m。
综上,在15~30 km/h速度区间内,车体横向振动主要受波长13.44~26.88 m的不平顺的影响,车体垂向振动主要受1.46~3.36 m范围内的短波不平顺影响。
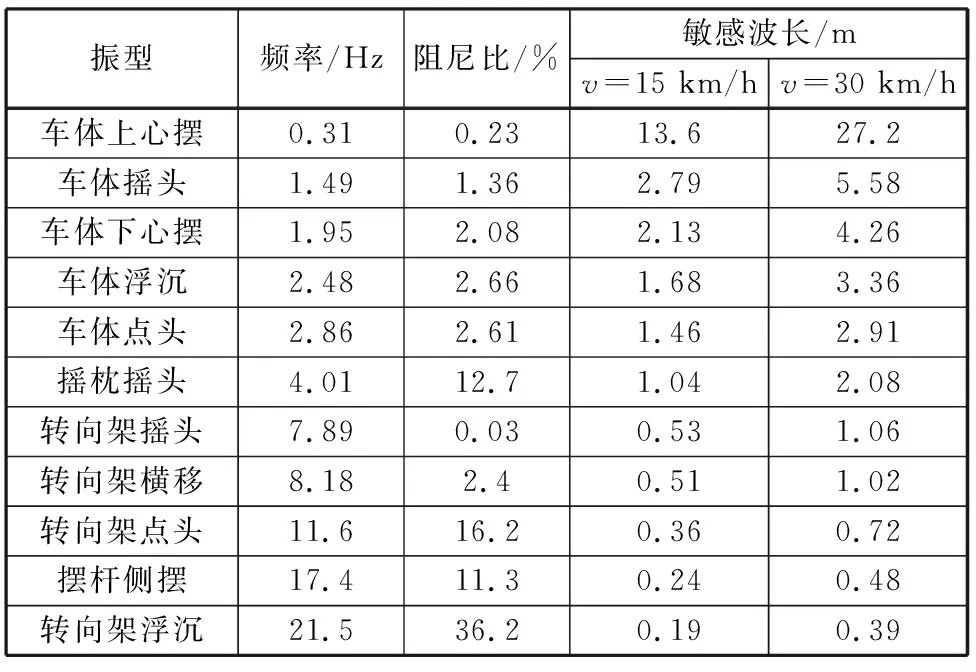
表2 车辆系统振动频率
3 轨道不平顺对车辆动力学性能的影响
悬挂式单轨轨道系统不平顺的特点与无砟轨道的不平顺相似,具有明显的谐波特征。因此,文中假设悬挂式单轨轨道不平顺由一系列不同波长,不同振幅的正弦波的叠加。
3.1 横向不平顺的影响
采用ISO 8608不平顺谱来模拟轨道垂向(走行面)不平顺,如图2所示。导向面不平顺(横向不平顺)采用长波与短波叠加的形式,如图3,其表达式为:
y(s)=A1sin(2Lπs+φ1)+A2sin(2lπs+φ2)
式中,L和l分别为长波和短波不平顺波长;A1和A2分别为长波和短波不平顺幅值。
仅考虑横向长波不平顺幅值的影响。L为20 m,l为2 m,A2取为1 mm,长波幅值A1分别取为2 mm,3 mm,4 mm,6 mm,8 mm,研究不平顺幅值对空轨车辆导向力和车体横向加速度的影响。计算工况为直线段。
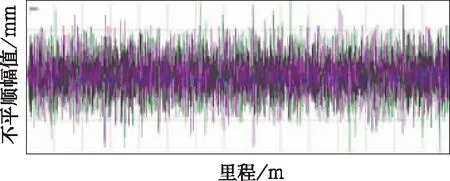
图2 ISO不平顺谱
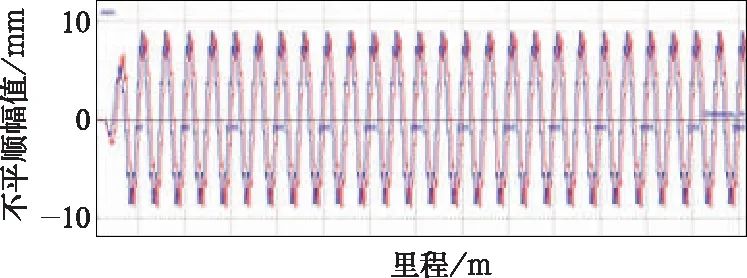
图3 横向不平顺谱
图4为横向不平顺幅值对前转向架导向轮导向力的影响。可见,在轨道不平顺的影响下,轮轨导向力波动较激烈。不同幅值下,导向力具有相似的变化规律,仅波动幅值存在差别。图5所示为横向不平顺幅值对轮轨导向力最大值的影响。可见,随着不平顺幅值的增大,最大的轮轨导向力逐渐增加。不平顺幅值从2 mm增大到8 mm时,最大轮轨导向力从18 kN增加到约28 kN,增幅约为55.6%,增幅较大。
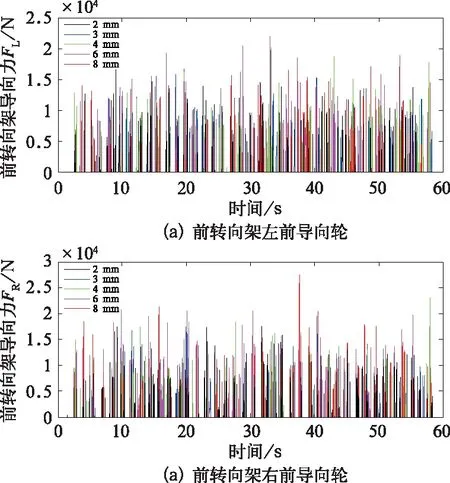
图4 横向不平顺幅值对轮轨导向力的影响

图5 横向不平顺幅值对轮轨导向力最大值的影响
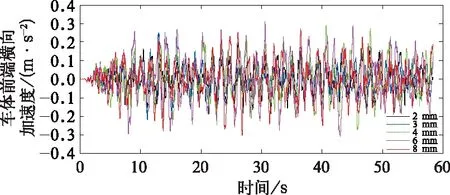
图6 横向不平顺幅值对车体横向加速度的影响
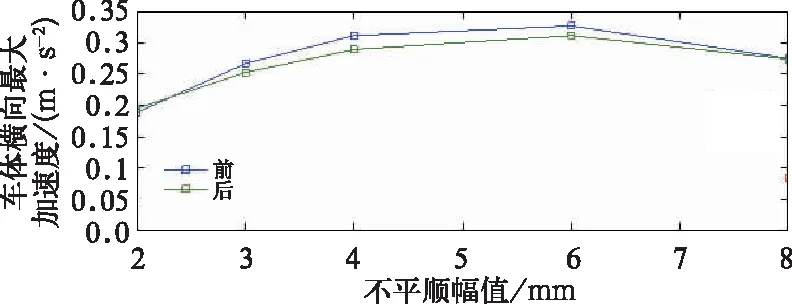
图7 横向不平顺幅值对车体横向加速度最大值的影响
图6为不平顺幅值对车体前部横向加速度的影响。图7为不平顺幅值对车体横向加速度最大值的影响。由图6可知,在横向不平顺的影响下,车体前部横向加速度呈现较强烈的波动。由图7可见,车体横向加速度最大值随不平顺幅值的增大先增大后减小,不平顺幅值为6 mm时,车体的横向加速度最大,约为0.32 m/s2。整个车体的横向加速度最大值在0.2~0.35 m/s2之间波动。车体前部加速度大于车体后部的加速度。
3.2 垂向不平顺的影响
垂向不平顺研究采用与横向不平顺研究类似的方法。轨道横向方向施加ISO-good不平顺谱,模拟轨道导向面不平顺。走行面不平顺(垂向不平顺)采用长波、中波和短波叠加的形式,如图8所示,其表达式如下:
y(s)=A1sin(2πs/L+φ1)+
A2sin(2πs/l+φ2)+A3sin(2πs/d+φ3)
式中,L,l和d分别为长波、中波和短波不平顺波长,A1,A2和A3分别为长波、中波和短波不平顺幅值。
长波代表由墩柱不均匀沉降及施工误差引起的不平顺,波长40 m。中波代表轨道梁挠曲、制造误差造成的轨道不平顺,波长20 m。短波不平顺代表加劲肋焊接残余变形所引起的不平顺,波长1.5 m。
图9为短波不平顺幅值对车体垂向加速度的影响。图9(a)为垂向加速度在时域上的变化曲线,图9(b)为最大的垂向加速度随不平顺幅值的变化曲线。如图所示,车体加速度在不平顺的影响下发生较强烈的振动,振动幅值随不平顺幅值的增大而线性增大,垂向不平顺幅值从1 mm增大到4 mm,最大的垂向加速度从0.58 m/s2增大到2.1 m/s2,已超过了最大允许值,增幅约为260%。图10为短波不平顺幅值对前转向架轮轨垂向力的影响。如图可知,垂向力随垂向不平顺幅值的变化规律与车体加速度变化规律相似,呈现较强烈的波动。轮轨垂向力随不平顺幅值的增大而线性增大,垂向不平顺幅值从1 mm增大到4 mm,轮轨垂向力最大值从75.6 kN增加到95.6 kN,增加幅度为26%,增幅较大。

图8 垂向不平顺谱
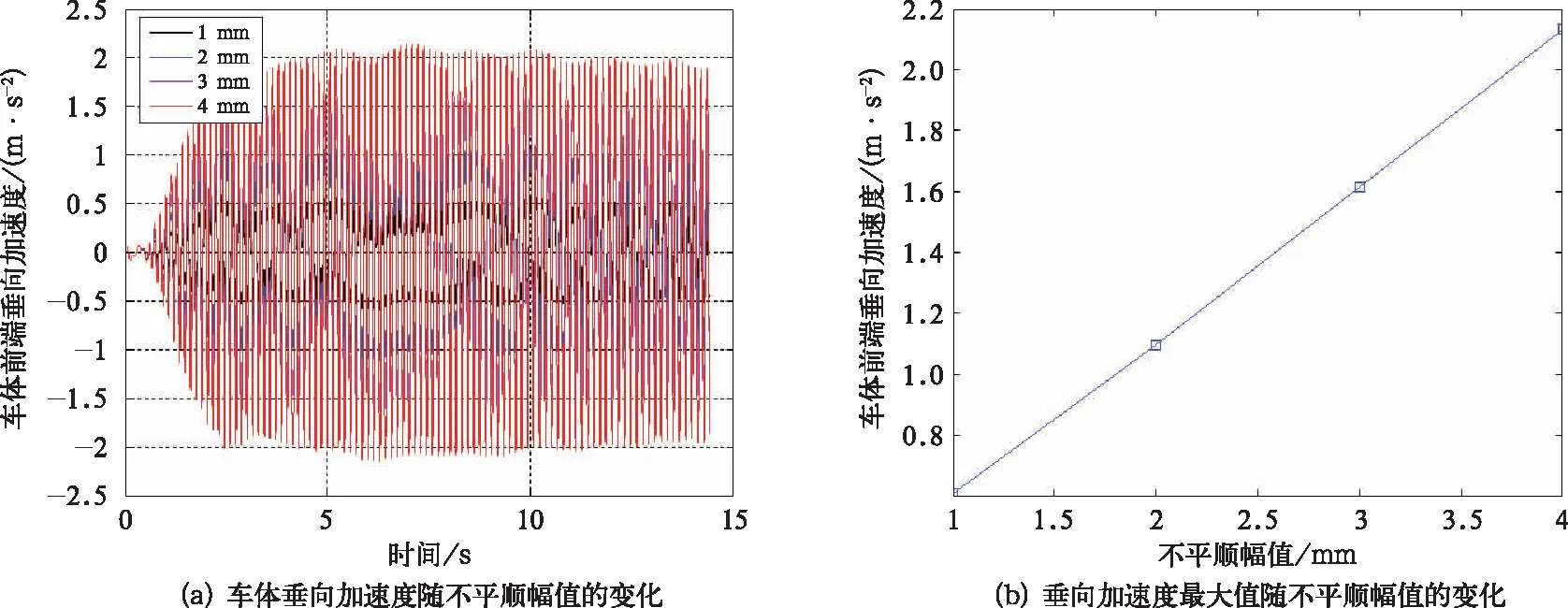
图9 短波不平顺幅值对车体垂向加速度的影响

图10 短波不平顺幅值对轮轨垂向力的影响
图11~图14分别为中波和长波不平顺幅值对车体垂向加速度和轮轨垂向力的影响。由于与短波不平顺作用下的规律相似,为控制篇幅,此处未给出它们在时域上的变化曲线。由图可见,随垂向不平顺幅值的增大,车体加速度最大值和轮轨垂向力的最大值基本上呈线性增大的规律。中波不平顺幅值从2 mm增大到6 mm,车体垂向加速度最大值从0.58 m/s2增大到0.67 m/s2,增幅约为15%,轮轨垂向力最大值从74.6 kN增大到75.8 kN,增幅约为2%,增幅均较小。长波不平顺幅值从2 mm增大到12 mm,车体垂向加速度最大值从0.63 m/s2增加到0.69 m/s2,增加幅度为9.5%,轮轨垂向力最大值从74.9 kN增加到75.7 kN,增加幅度为1%。
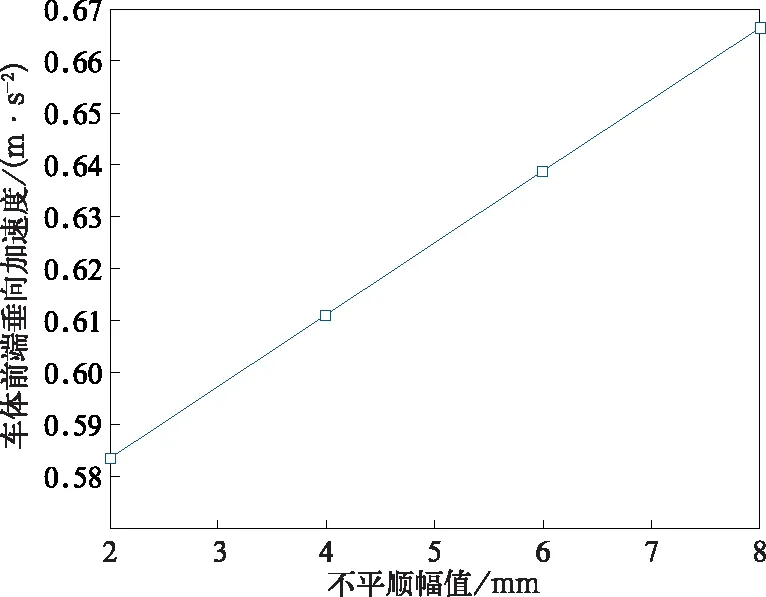
图11 中波不平顺幅值对车体垂向加速度的影响
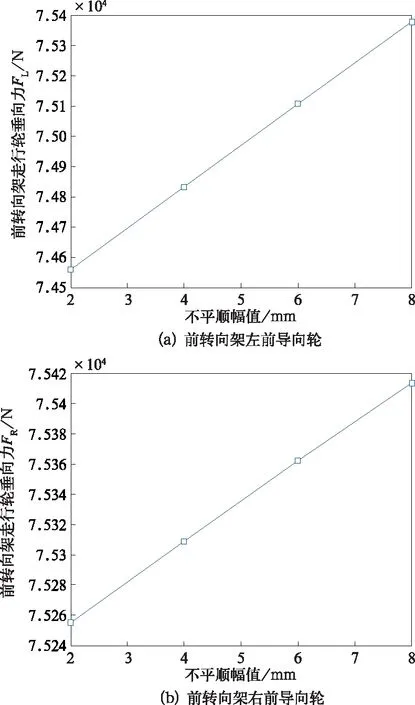
图12 中波不平顺幅值对轮轨垂向力的影响
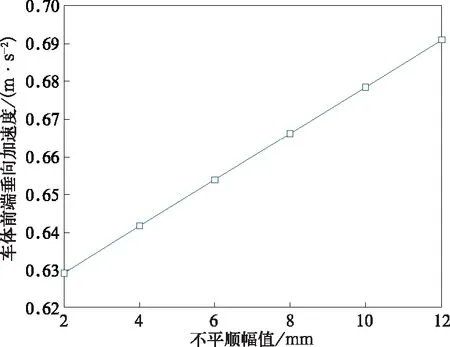
图13 长波不平顺幅值对车体垂向加速度的影响
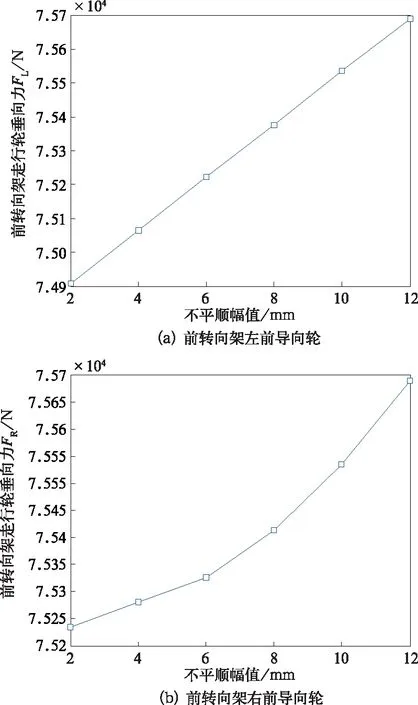
图14 长波不平顺幅值对轮轨垂向力的影响
4 结 论
(1) 车体横向振型频率,车体上心摆为0.31 Hz、车体摇头为1.49 Hz和车体下心摆动为1.95 Hz。车体垂向振型频率,车体点头为2.86 Hz和车体浮沉为2.47 Hz。在运行速度15~30 km/h范围内,悬挂式货运单轨车辆的横向振动敏感波长范围为13.44~26.88 m,垂向振动敏感波长范围为1.46~3.36 m。
(2) 车体横向加速度最大值和轮轨导向力随横向不平顺幅值的增大基本上呈线性增大的趋势,车体横向加速度最大值随不平顺幅值的变化在0.2~0.35 m/s2之间波动,始终在最大允许值范围内。不平顺幅值从2 mm 增大到8 mm时,最大轮轨导向力从18 kN增加到约28 kN。
(3) 车体垂向加速度和轮轨垂向力均随垂向不平顺幅值的增大而线性增大。其中短波不平顺的影响最显著。短波不平顺幅值从1 mm增加到4 mm,车体垂向加速度幅值从0.58 m/s2增加到2.1 m/s2。在工程实际中,应重点对走行面上的短波不平顺进行监测和控制。