一种行星锥齿轮无级变速机构的传动特性研究
2020-08-26叶友东蔡志盛张建文
叶友东,蔡志盛,张建文
(安徽理工大学机械工程学院,安徽 淮南 232001)
行星式无级变速传动是由作行星运动的中间滚动体、依靠滚动副间的摩擦力来传递运动和动力的,其传动原理与一般锥齿轮行星轮系很相似,通过改变太阳轮或行星轮的工作半径来实现无级变速目的。RX型环锥行星式无级变速器就是其中常见的一种行星式牵引无级变速装置,具有结构简单、工作可靠等特点,在食品、包装、造纸、卷烟等轻工业得到广泛应用[1]。但由于依靠滚动体的摩擦力来传递动力,存在摩擦功耗大、效率低的缺点,因此考虑用锥齿轮传动来代替其中的摩擦轮传动,进而改善摩擦、磨损状况。
1 结构特点
行星锥齿轮无级变速机构的主传动部分在基本结构的布置形式上仍然沿用原环锥行星无级变速机构的基本形式,而将其中的输入端、行星轮、输出端由原来的锥轮改为锥齿轮,行星锥齿轮无级变速机构的传动示意图如图1所示。其结构特点是:主、从动中心锥齿轮1和3分别在行星锥齿轮2的两侧与其啮合,主、从动锥齿轮同轴线,其中1与2外啮合,3与2内啮合;行星锥齿轮浮动安装在行星架H上,可绕行星架架转动,行星架H的轴两端通过轴承分别支承于输入、输出轴内;行星锥齿轮2上固连一个调速锥2′(圆锥体),其一侧母线要保持与输入、输出齿轮1和3轴线平行(水平),调速锥2′与调速环4之间保持点接触形成摩擦传动,在变速器工作过程中调速环4静止不动,调速时由调速机构带动其沿调速锥2′锥面水平移动,改变它与调速锥2′锥面的接触位置及相应的工作半径,从而实现不同的转速输出。
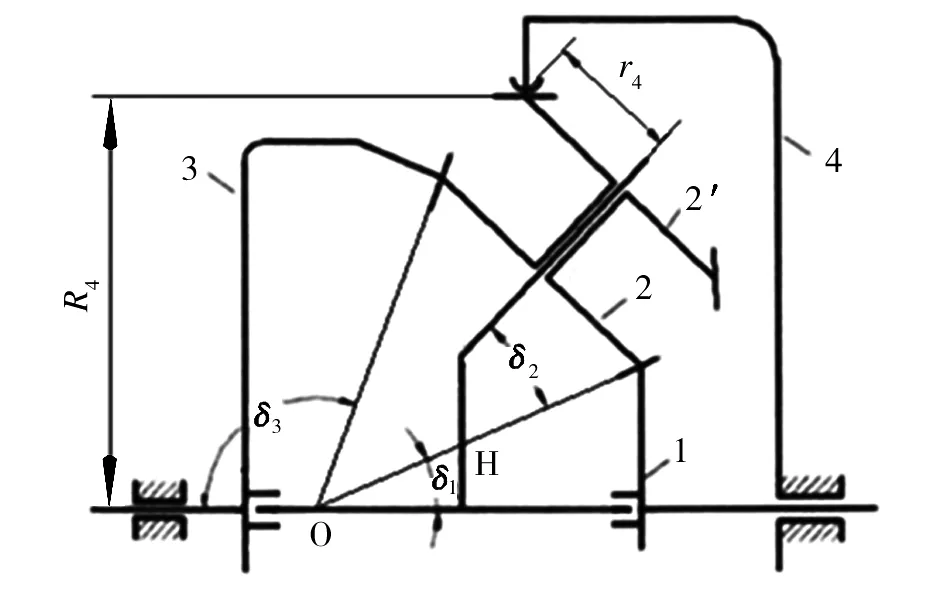
图1 行星锥齿轮无级变速机构示意图
2 过零调速机理
行星锥齿轮无级变速传动相当于一个3K行星轮系,由3个周转轮系复合组成,即1-2-2′-4-H和3-2-2′-4-H及1-2-3-H,其中主、从动太阳轮1,3和行星架H的轴线平行,利用转化轮系法可求得传动比,对于1-2-2′-4-H有
(1)
对于3-2-2′-4-H有
(2)
式中:r4为调速环4与调速锥2′接触点至行星锥齿轮轴线的距离;R4为调速环4与调速锥2′接触点至中心锥齿轮1(或3)轴线的距离。
由于变速器工作过程中调速环4静止不动,即n4=0,联立式(1)和(2)可得行星锥齿轮无级变速机构的传动比计算公式为
(3)
3 传动效率计算
无级变速机构的传动效率是评价器性能优劣的重要指标之一,行星锥齿轮无级变速机构传动中的功率损失主要由啮合损失、轴承损失、液力损失等组成[2],后两项效率计算在现有文献中均作近似计算且与机构传动比大小无关,本文仅讨论啮合功率损失引起的传动效率计算。
由于行星锥齿轮无级变速机构可视为一个3K行星轮系,结构较为复杂,三个中心轮1、3、4为基本构件,行星架H不作输入、输出构件用,其转化机构中的功率流向不易判断,因此,在推导机构传动效率时,应先判定其转化机构中的功率流方向。由机械效率定义及“啮合功率法”原理,可得行星锥齿轮无级变速机构的传动效率可由式(4)表示。
(4)

同理,可得轮3轮的啮合功率系数
(5)
不计摩擦损失时的力矩平衡条件可得
T1+T3+T4=0
(6)
联立式(5)和(6),可得
(7)
将式(7)代入式(4),则得行星锥齿轮无级变速机构传动的效率公式为
(8)
(9)
不计摩擦损失时的力矩平衡条件可得
T1+T3+T4=0
(10)
联立式(9)和(10),可得
(11)
将式(11)代入式(4),则得行星锥齿轮无级变速机构传动的效率公式为
(12)
4 传动效率分析
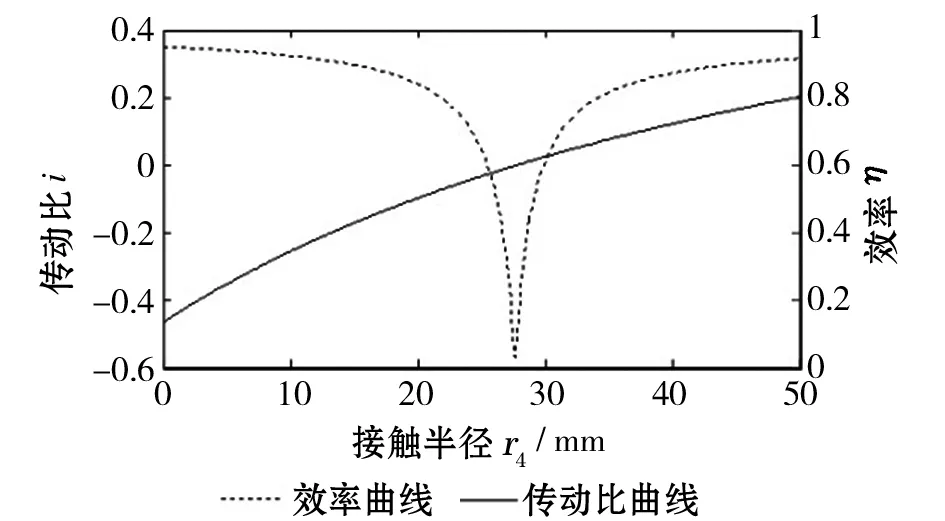
图2 传动比及效率随接触半径变化规律曲线
由图2所示曲线可知
(3)当输入转速取1 500rad/min时,通过计算,传动效率最佳区段应为-200~-700rad/min或200~700rad/min,在此期间传动效率基本保持在85%以上,而对于输出转速(正转或反转)在100rad/min以下时传动效率低于60%在实际使用中应尽量避免。
5 结论
在分析了新型行星锥齿轮无级变速机构的结构特点、运动学关系的基础上,推导出机构的传动比及传动效率的计算公式,分析了该无级变速机构的调速机理,给出了传动比、传动效率在调速过程中的变化规律。通过分析研究可知:行星锥齿轮无级变速机构较原机构的调速性能有较大改善,具有更大的调速范围,且能实现过零调速;为防止传动效率过低,行星锥齿轮无级变速机构应当避免工作在输出转速极低的场合。
