自动变速器驻车机构设计与分析
2020-08-17郭厚保洪龙龙戴焰彪
郭厚保 洪龙龙 戴焰彪
(麦格纳动力总成 格特拉克(江西)传动系统有限公司,江西 南昌 330013)
引言
自动变速箱通常有P、R、N、D四个功能挡位。驻车机构即是大家俗称的P挡装置,是实现自动变速器中用于锁止整个传动系统,防止汽车出现意外滑行的装置,使汽车在平地或一定角度的斜坡上可无时间限制的停驻[1-2]。根据GB7258-2017《机动车运行安全技术条件国家标准》要求,驻车制动使用电子控制装置时,锁止装置应为纯机械装置,发生断电情况锁止装置仍应保持持续有效。驻车机构在自动变速器中的作用至关重要,设计上需满足以下要求[3-4]:(1)当汽车实现驻车后,尤其在坡道上驻车时,驻车机构不能自动脱挡,从而导致驻车功能失效。(2)当汽车处于正常行驶工况下,驻车机构不能发生自动驻车。(3)当汽车低于临界车速时(一般推荐值为5Km/h,也可同主机厂商定),驻车机构能实现驻车功能;当车速超过临界值,即使外部操纵杆执行了挂P挡动作,驻车机构也必须保证不能实现驻车功能。
本文以一套成熟的自动变速器驻车机构为例,对该机构中实现驻车锁止的几个重要零部件进行受力分析,从而得出驻车机构中主要的零件设计参数对驻车性能,包括溜车距离、自动解锁性能、自动锁止性能、临界车速计算、电机锁止力矩、电机解锁力矩等主要性能的影响,为驻车机构的设计提供一些理论依据。
1 驻车机构结构分析
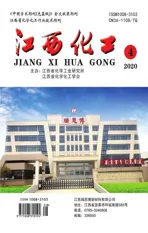
驻车机构设计要求简单可靠,文中讨论的驻车机构主要包括驱动电机、双联齿轮、定位钢球总成、扭簧、驱动轴、驱动齿轮、凸轮、驻车棘爪、安装销、导向销及驻车棘轮等。当驾驶员挂P挡时,外操纵机构转化成电信号给TCU,从而使驱动电机逆时针旋转,带动驱动轴总成旋转。凸轮旋转与驻车棘爪上斜面接触,产生向下的压力使得驻车棘爪进入驻车棘轮齿槽内。驻车棘轮通过内花键安装在输出轴上,通过锁定驻车棘轮从而实现驻车锁止功能。当驾驶员摘除P挡时,外操纵机构转化成电信号给TCU,从而驱动电机顺时针旋转,带动驱动轴总成旋转。凸轮施加在驻车棘爪上的压力降消除,同时驱动齿轮内槽与安装与驻车棘爪上的槽配合将驻车棘爪抬升,脱出驻车棘轮齿槽从而解除驻车功能。
注:1-驱动电机 2-双联齿轮 3-定位座总成4-扭簧5-驱动轴 6-驱动齿轮7-驱动凸轮 8-驻车棘爪 9-支撑销 10-驻车棘轮 11-导向销
2 溜车距离计算
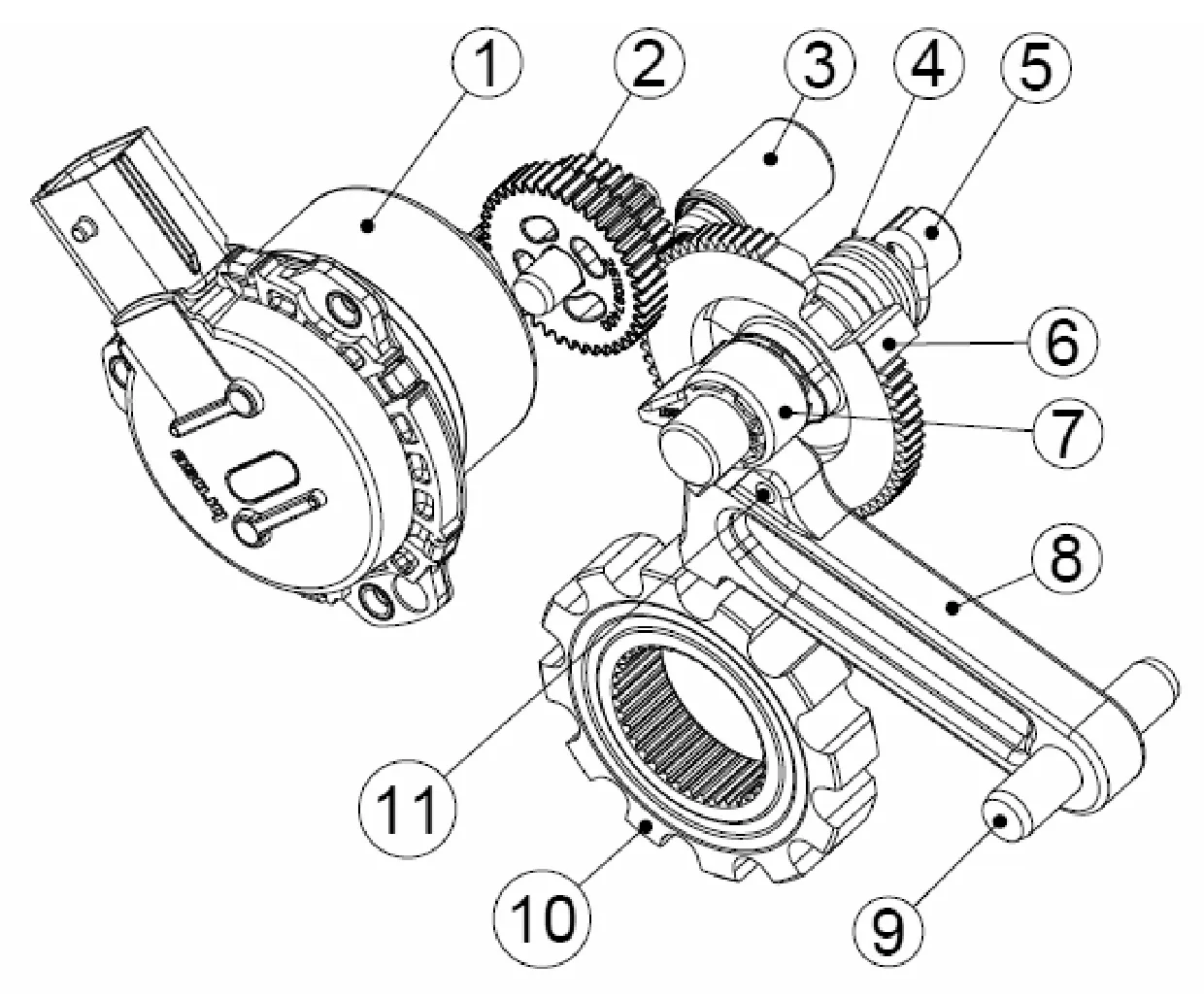
当驾驶员将操纵手柄推到P挡后,由于Park Lock的驻车棘轮和驻车棘爪有可能是齿对齿接触,此时车辆并未锁止。当车辆发生溜车,车轮带动驻车棘轮转动一个齿后驻车棘爪和驻车棘轮啮合工作,锁止车辆。将棘爪从一个齿到下一个齿面,驻车棘轮转过的角度记为α,这段角度车辆移动的距离为L,则有:
(1)
式中i为驻车棘轮安装所在轴与车轮的的速比,下面各式i均相同。
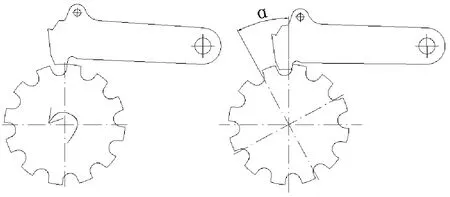
图2 驻车棘轮和驻车棘爪工作示意图
3 自动解锁功能校核
当汽车在坡度为β的斜坡上驻车时,假设所有整车通过驻车机构锁止。此时对驻车棘爪受力分析,FN为驻车棘轮对驻车棘爪的正压力,驻车棘轮受到的驻车棘爪正压力为FN′。大小与FN相等,方向与FN相反,计算驻车棘轮承载扭矩:
(2)
T0=FN′*R棘轮
(3)
(4)
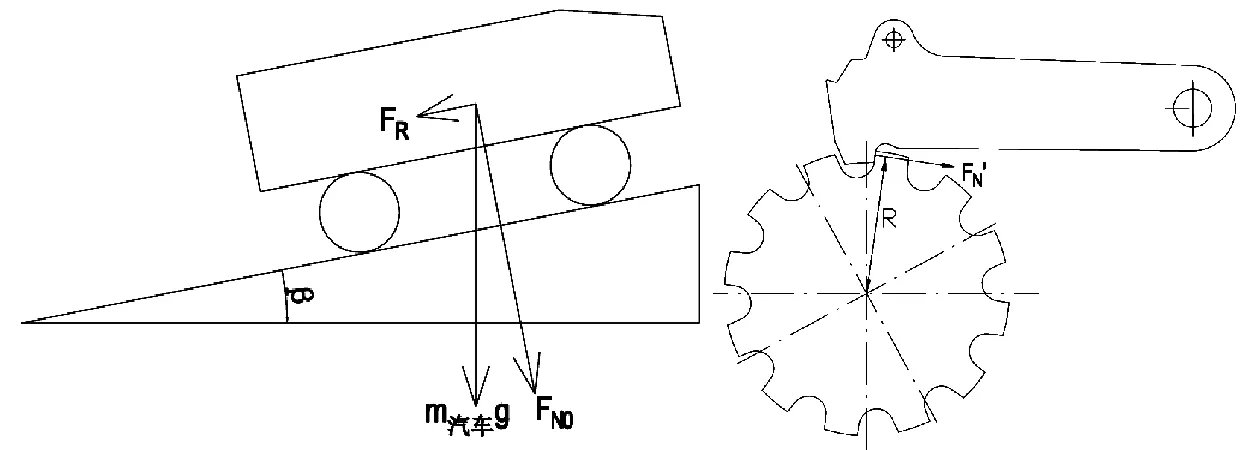
图3 汽车在斜坡上受力情况
当汽车处于非驻车工况下,发生任何异常情况驻车机构不能自动驻车。即驻车棘轮对驻车棘爪的旋转力矩能克服摩擦力、棘爪重力、支撑销处旋转产生摩擦力的合力矩,将棘爪弹出来。此时对棘爪受力分析,FN为驻车棘轮对驻车棘爪的正压力,LF为FN相对于驻车棘爪回转中心的力臂。f1为驻车棘爪对驻车棘轮的摩擦力,摩擦系数为u1,lf1为棘爪受到的摩擦力相对于棘爪回转中心的力臂。G为驻车棘爪重力,为避免路面颠簸或追尾等情况导致汽车本身振动较大,一般按照2g加速度计算。力臂为LG,M1为支撑销处的摩擦力矩,则有:
FN*LF>f1*lf1+2G*LG+M1
(5)
其中f1=u1*FN,根据式(4),则有:
(6)

图4 棘爪受力情况
4 自动锁止功能校核
当汽车处于驻车工况时,驻车机构不能自动脱挡。此时凸轮会对驻车棘爪产生一个向下的压力防止驻车棘爪弹起,同时定位钢球通过与驱动齿轮上的斜面结构配合产生扭转力矩,防止凸轮回转,造成驻车脱挡。选取下坡驻车工况进行分析,如图5进行受力分析。FN为驻车棘轮对驻车棘爪的正压力,LF为FN相对于驻车棘爪回转中心的力臂。f1为驻车棘爪对驻车棘轮的摩擦力,lf1为棘爪受到的摩擦力相对于棘爪回转中心的力臂。G为驻车棘爪重力,力臂为LG,M2为定位钢球与驱动齿轮斜面配合产生的扭转力矩,F′为驻车棘爪对凸轮的正推力的反作用力,凸轮对驻车棘爪的正推力作用力臂为LF′,f1为驻车棘爪与驻车棘轮的摩擦力,摩擦系数为u1,力臂为lf1。凸轮与棘爪的摩擦力为f2,摩擦系数为u2,力臂为lf2,则有:

图5 驻车时棘爪受力情况
FN*LF-f1*lf1-G*LG=F′*LF′
(7)

(8)
无法自动脱挡的条件为:
M2+f2*lf2-F′*L1>0f2=u2*F′
(9)

(10)
根据式(4),则有:
(11)
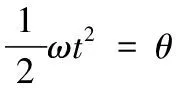
5 临界车速计算
所谓临界车速,即驻车锁止机构能够完成啮合时的最高整车车速[5]。临界车速的计算条件为:驾驶员已经将汽车挂入P挡,但是由于驻车棘轮和驻车棘爪处于齿对齿接触。电机继续带动驱动齿轮转动直到限位点,此时扭簧处于受压缩状态,凸轮持续给棘爪一个压力。在驻车棘轮由于车轮带动转过一个驻车棘轮齿槽宽与驻车棘爪齿厚弧长差时间内,驻车棘爪由于扭簧力的作用正好从起始斜面接触转化为与顶部弧面接触,驻车棘爪也同驻车棘轮完成锁止动作。假定一个驻车棘轮齿槽宽与驻车棘爪齿厚弧长差对应的角度为δ,驻车棘爪转过的角度为θ。t为运动时间,则有:
(12)

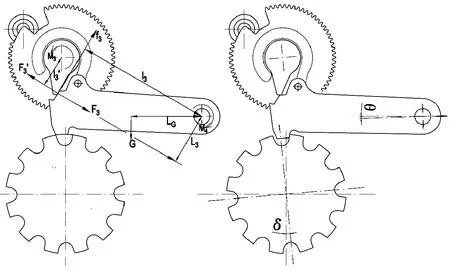
图6 驻车进挡时棘爪的受力情况
F3*L+G*LG-f3*l3-M4=J*ω
(13)
式中F3=F3′,f3=u3*F3,J为驻车棘爪的转动惯量,ω为驻车棘爪的转动角加速度。
F3=M3/l3′
(14)
(15)

(16)
6 驱动电机锁止力矩
驾驶员已经将汽车挂入P挡,驱动电机驱动驻车棘爪转动,假定驻车棘轮和驻车棘爪处于齿对齿接触。电机继续带动驱动齿轮转动直到限位点,此时扭簧处于受压缩状态,凸轮持续给棘爪一个压力。当驻车棘轮和驻车棘爪齿对齿接触后,如图6驱动齿轮转过的角度为γ,扭簧的刚度系数为K,安装初始压缩扭矩为T0。则驱动电机的锁止力矩为:
(17)
式中i1为驱动电机到驱动齿轮的传动比。
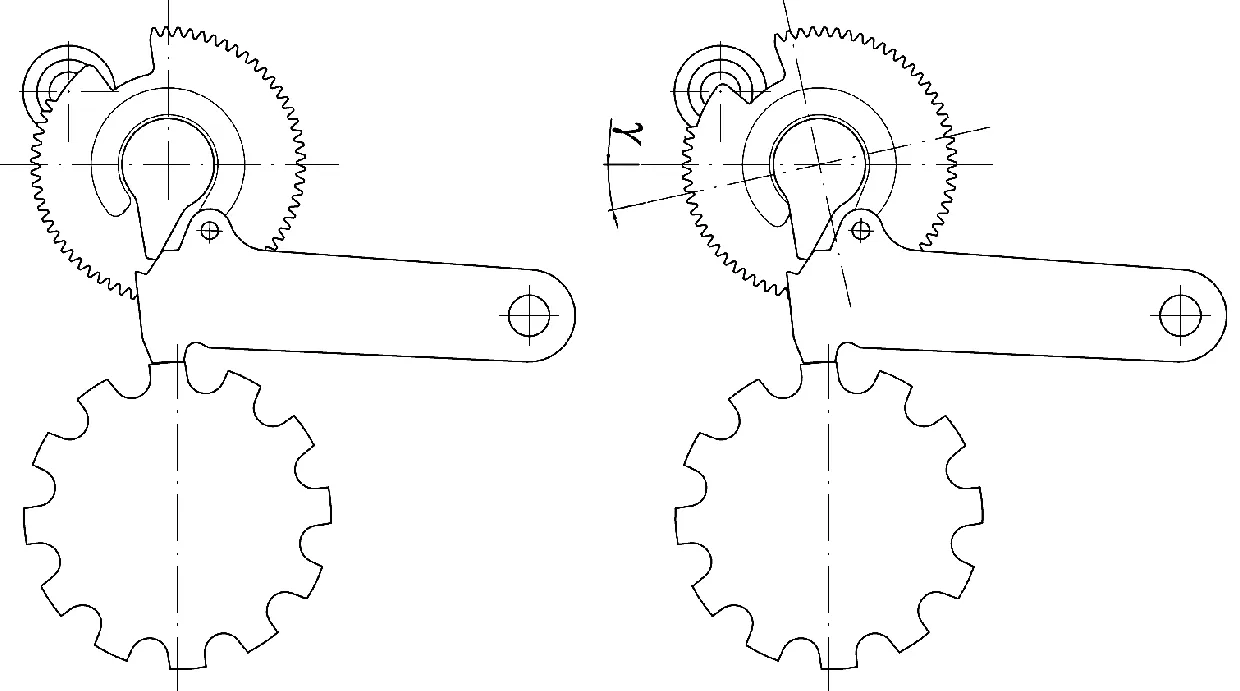
图7 驱动齿轮转动角度
7 驱动电机解锁力矩
当需要启动汽车时,驾驶员必须要摘掉驻车挡,这就要求在正常情况下,驻车机构驻入后能随时摘出。对机构的受力分析和上述自动锁止功能校核的图5一致。
驱动电机解锁力矩为:
(18)
根据式(4)和(8),则有:

(19)
式中i1为驱动电机到驱动齿轮的传动比。