基于Harris- SURF 描述符的图像配准方法
2020-08-11李慧慧
李慧慧
(安徽理工大学 测绘学院,安徽 淮南232000)
图像处理技术是计算机领域中较为重要的应用技术,而图像配准作为图像处理技术中一种,其应用范围较为广泛,例如数码显示、军事侦察、医学图像等。配准的目的是找到一种功能,该功能将一个图像的点映射到另一图像的对应点,从而在图像之间提供几何对齐。此过程可以补偿对象的运动或传感器之间的某些差异,从而实现在公共参考系中比较和分析图像[1]。
图像配准方法多种多样,主要是基于区域[2]和基于特征[3]两种方法。当图像没有特定的细节和独特的信息时,使用基于区域的方法进行图像配准更适宜。但是对于复杂图像,基于区域方法因通常更耗费时间而不适用作为配准方法。当图像包含足够独特且可有效检测的对象时,通常使用基于特征的方法更为有效。
最经典的基于特征的方法是SIFT(Scale Invariant Feature Transformation)方法[4],该方法通过引入高斯算子的Laplacet 提取了尺度和旋转不变特征点,实现了自动图像匹配。但缺点是它只能提取128 维针对每个检测到的兴趣点,在特征匹配步骤中需要更多时间的特征向量,为了解决此问题,Bay[5]在2006 年提出了SURF(Speed Up Robust Features)特征检测和描述符算法。SURF 特征检测器与SIFT 具有相似的鲁棒性,但是相比于SIFT,SURF 算法的运算效率更高,更能有效节约配准时间。虽然SURF 算法具有较高运算效率,但是SURF 算法在寻找的特征点时具有不稳定性,在进行点对之间匹配时,易造成较多的错误匹配,从而对配准正确率造成影响。
本文主要思想是是通过利用Harris 算法检测到角点作为图像特征点,提取的特征点需要计算出相应的描述符才能进行特征点的匹配,采用SURF 描述符对其进行描述符的计算,获取点对之间的对应点对。匹配后的点对会存在错误匹配,需要通过RANSAC 算法[6]对错误匹配点进行剔除并计算出几何变换矩阵。
1 Harris-SURF 特征描述
1.1 Harris 角点检测
经典Harris 角点检测主要思想是在2 维灰度图像中寻找各个方向上强度变化很大的点[7]。本文将探测到的角点作为图像配准的特征点。假设2D 灰度图像表示为I(x,y),在区域(u,v)上获取一个图像块并将其位移(x,y),这两个图像块之间的平方差M的加权和为:
其中,矩阵D 称为第二矩阵,它由图像I(x,y)的强度函数的一阶偏导数得来:

考虑到图像块中围绕角点的每个点的贡献应该不同,因此使用权重函数ω(u,v)为靠近角点的点分配较大的权重,为边界处的点分配较小的权重。通常,将高斯函数选作权重函数:

探测角点的度量函数:

其中,D 是2×2 的非奇异矩阵,所以它具有两个特征值λ1、λ2;φ 为经验值(通常在0.04~0.15 之间)。计算出图像中每个点的Pc 度量后,可以选择Pc 值高于特定阈值的点作为Harris 角点。
1.2SURF 特征提取
SURF 算法中包含四个步骤:特征点检测,方向分配(可选步骤),局部描述符和特征点匹配(使用其描述符)。本节主要计算由Harris 角点检测得到的特征点的描述符,通过描述的匹配从而匹配特征点对,寻求出图像的几何转换关系。
在SURF 中[8],描述符在特征点周围的20s 正方形区域中生成。将该区域划分为4×4 个正方形子区域。对于每个子区域,从5×5 个采样点计算水平方向dx和垂直方向dy上的Haar 小波响应。最后,对于每个子区域,将响应及其绝对值相加,并形成相应的4D 描述符向量(∑dx,∑dy,∑|dx|,∑|dy|)。对于所有4×4 子区域,将此4D 描述符向量组合起来,将得到长度为64的描述符向量。
1.3RANSAC 算法剔除错误匹配点
根据第二节描述的方法可以得到图像的之间的对应点对,但是由于图像的相似性,特征点之间也会存在相似性,会造成对应点对的错误。因此本文采用RANSAC 对误匹配点进行剔除。假设待配准的图像的对应点转换关系可以如下表示:
(1)在特征点的集合中随机抽取4 对对应点,计算其单应性矩阵H:

式中,(x,y,1)与(x',y',1)为待配准图像之间的对应点,H为单应性矩阵。
(2)计算余下特征对应点在H 变换下的结果,计算出匹配点之间的误差,如果误差小于给定阈值则视为内点,计算出内点的占比率,若该占比率大于设定阈值则接受H 值。
(3)若内点占比率小于设定阈值,重复步骤1~2。
2 实验结果与分析
为了验证所提方法的正确性,实景拍摄了两组不同角度具有一定重叠度的照片进行配准实验,如图1 所示。实验采用Matlab 语言进行数据处理。
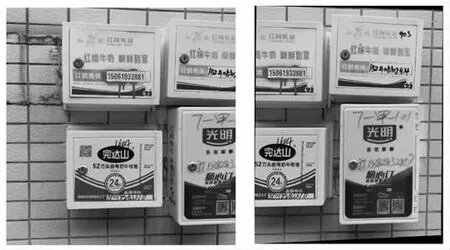
图1 配准前实验图像

图2 配准之后的图像
从图2 可以看出,所提出的方法配准效果良好,两张不同角度拍摄的图像几乎重合在一起。表1 对两种算法的配准效果作了对比,准确率的计算可以依据如下公式:

由表1 可以看出两种方法在匹配特征点对上有很大差别,由SURF 算法提取的特征点匹配到较多错误点对;其次,两者配对的准确率具有明显差别,说明本文所提方法可以在特征点的检测上进行改善,从而有效提高特征点匹配的正确率,达到提高配准精度的目的。
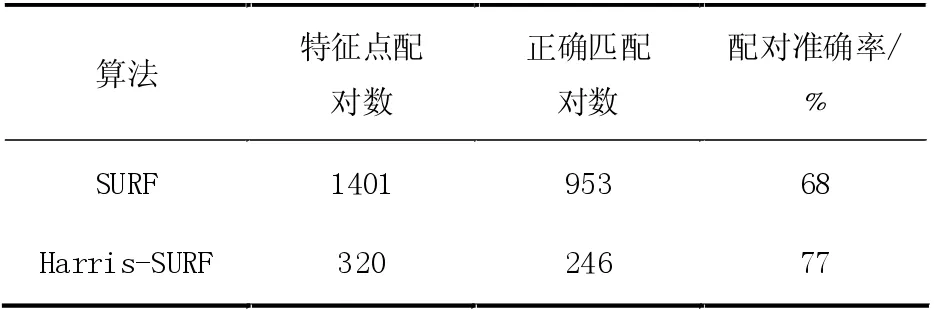
表1 两种算法下的效果对比
3 结论
本文针对SURF 算法提取的特征点具有不稳定性,对配准准确率造成影响的问题,提出了对SURF 算法进行了改进。利用Harris 角点代替SURF 特征点,并保留了SURF 算法的描述符优势来建立角点的描述符向量来实现图像的精确配准。实验结果表明基于Harris-SURF 方法利用Harris 角点检测代替SURF 算法特征点检测方法能有效提高特征点的匹配度,进而提高图像配准的精度。该方法既保留了SURF 方法原本的优势,又能有效改善SURF 方法的缺陷。
