一款安保警戒机器人的设计与实现
2020-08-10赵晓慧秦绪玲
赵晓慧, 秦绪玲
(营口职业技术学院机电工程学院,辽宁营口115000)
近年来,大型集会场所的公共事故频发,例如:2014年上海外滩踩踏事件造成了36人死亡,49人受伤.究其事故原因,主要是现场管理不力,安保警力不足,疏散不当,指引不及时[1].因此,迫切需要设计一款具有辅助疏散指引功能的安保机器人.近年来,国内外安保类机器人产品逐渐进入大家的视线,主要功能包括巡逻警戒、自动巡航与路径规划、语音对讲、火灾报警等.然而,针对集会场所的人流疏散与监控并没有相应产品.结合国家安全应急部门在处置反恐、驱暴等方面的实际需求,研制一款能够辅助公安干警监控人流密集场所并可完成一系列安保工作的安保警戒机器人.该机器人能够临时定点安置在人流密集的大型活动场所、节假日广场及景点.系统可由一台机器人形成警戒点,或由多台机器人形成警戒线,警务人员统一调度指挥.安保警戒机器人可替代公安干警24 h不间断监控重要活动场所的警戒区域,可根据现场的实际需要灵活布置,采用声光等方式对靠近的人员予以劝诫,对集中人流进行合理疏导,对违纪违规的行为进行取证和警告.该款安保机器人能够辅助完成安保警戒任务,大幅度减少现场警力,从而有效预防事故发生,加强防御控制能力.现就安保警戒机器人的整体设计及其功能模块进行分析.
1 机器人系统概述
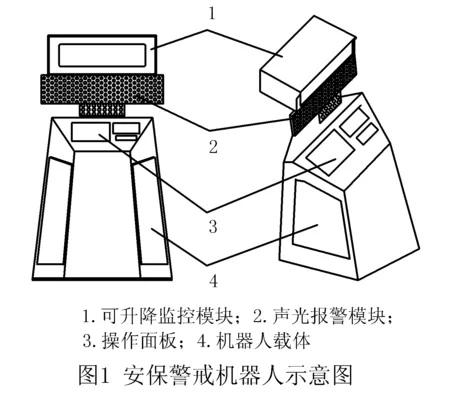
安保警戒机器人主要由可升降监控模块、声光报警模块、操作面板和机器人载体四部分组成(如图1所示),可伸缩支架连接监控模块与机器人载体.其中,监控模块为安保机器人的头部,安装在可伸缩支架上方,主要装载车牌识别摄像头、区域警戒摄像头、声光报警系统和网络数据传输天线.机器人操作面板采用友好化交互界面,主要用于显示和识别身份信息,机器人载体装载可伸缩支架的控制模块及机器人的电源模块.四部分功能模块相互配合完成一系列安保工作.
机器人具有以下主要功能:
(1)实时监控人流密集场所动向,并将拍摄画面实时传输到后方指挥平台,后方平台指挥人员可根据需要调整机器人监控模块的高度及方向.
(2)实时记录过往车辆,建立车辆信息库,对可疑车辆进行声光报警提示并取证.
(3)可在后方指挥平台根据现场需要设置警戒线,机器人对越界人员进行警告及疏导.
(4)机器人可验证人员身份信息,对可疑人员进行记录.

2 机器人载体结构设计
机器人载体采用轮式行走机构[2].为防止机器人受外力作用倾倒发生危险,机器人载体底部安装可伸缩撑脚,在架设机器人时可拉出,以增强机器人的稳定性.
机器人载体为整体式框架结构(见图2).底部为动力层,安装电池、驱动电机和电压转换模块;中部为控制机器人可伸缩支架的动力系统;上部安装机器人控制系统.
3 机器人动力控制系统设计
机器人采用冗余的供电系统,可以自由切换AC220V或DC24V.采用AC220V供电时,为机器人直流电源自动充电.这里选用两档开关直接切换机器人动力系统供电模式.控制系统用于分析机器人的头部动作,主要有机器人头部左转、右转、上升和下降.
机器人头部的转动通过步进电机经减速器连接桅杆实现.电机驱动的控制方式主要有微机控制系统、运动控制卡和PLC控制等形式[3].考虑到适应工厂恶劣的操作环境,同时希望简化操作工人对机器的操作过程, PLC可以使用专用的运动控制模块控制步进电机单轴或多轴的位置,故采用可编程控制器(PLC)作为控制元件.
机器人头部的升降动力系统以气源为动力,通过空气的压缩推动多节缸套活塞的运动,从而达到升降重物的目的.相对于电动升降杆和液压升降杆来说,气动桅杆的升降传动机构较为简单,且不会因为钢丝绳的断裂而造成设备损毁和人员伤害,也不会因液压系统的泄露对环境造成污染,具备重量轻、维修方便、安全、寿命长、耐候性好和价格低的特点.多方面考虑户外风、机器人本体尺寸和轻量化的设计原则,气动桅杆的直径不易过大,且桅杆压缩长度应控制在机器人本体高度的范围.机器人头部的升降动作通过控制气动充气泵的充放气来实现.
4 机器人后场平台
机器人采用一体化5.8 G无线网桥与后场通讯,系统总体框架结构如图3所示.后场软件系统采用模块化的设计方法,集人员身份识别、车辆识别、人员越界识别和机器人云台控制等多个子系统,并嵌入视频监控的联动应用,能同时显示三台机器人前端的视频图像.软件集成车牌识别摄像头及区域警戒摄像头SDK,采用开放API,以方便后续功能设备嵌入开发,人性化的操作界面操作方便.
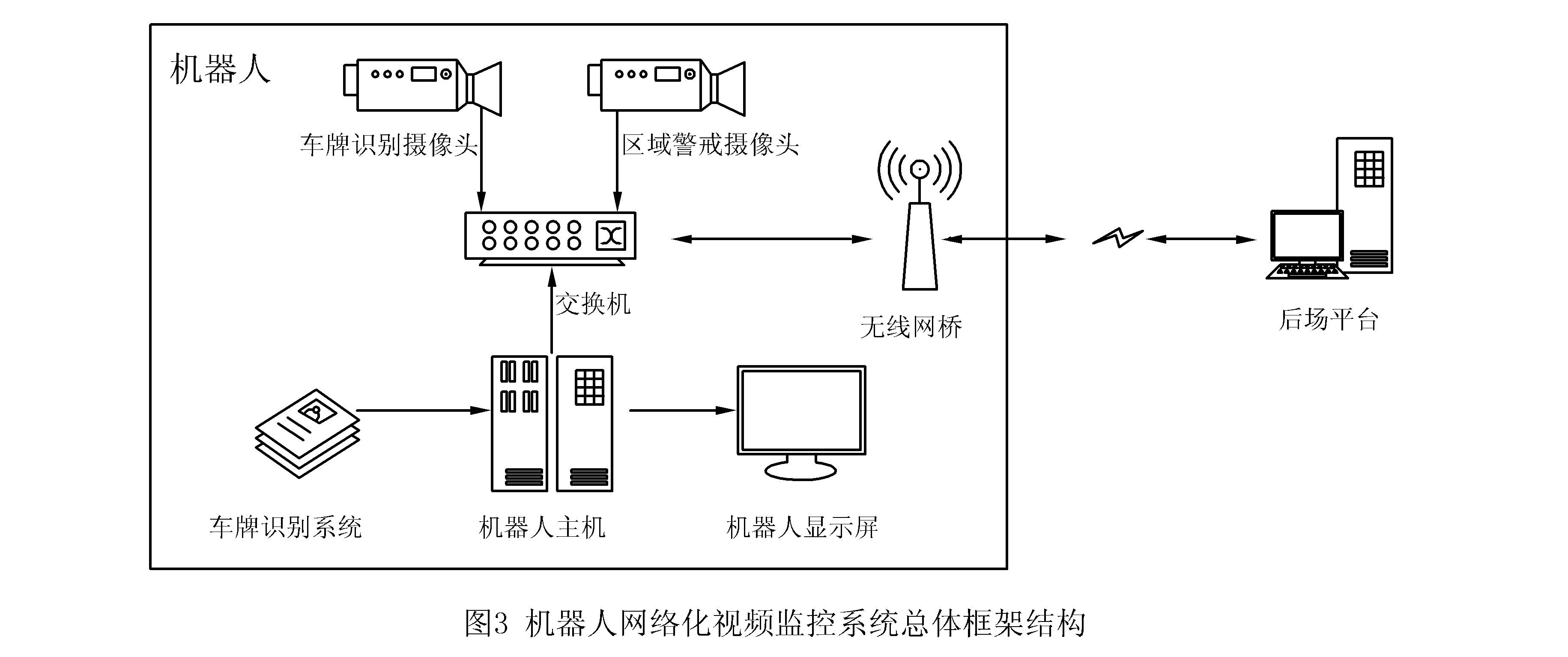
人员身份信息识别,可通过二代身份证、摄像头拍照采集信息,系统对机器人前端读取的身份信息与已录入信息库的信息进行比对识别,并对读取信息进行存档;车牌识别系统可通过手动输入的方式建立管理信息库,机器人前端抓拍过往车辆,系统比对车辆信息库,机器人前端发出相应的声光报警提示,警告无权限车辆,后场软件将车辆信息录入系统;人员越界识别系统可根据真实物理警戒线的摆放,在后场设置虚拟警戒线,对穿越警戒线人员机器人前端发出声光警告,后场系统对其越界行为抓拍取证;云台控制系统能够调节机器人的监控范围,包括伸缩支架的高度和伸缩摄像头的转动角度.
5 安保警戒机器人样机试验
安保警戒机器人试制样机如图4所示.为验证安保警戒机器人的实际使用功能,分别进行了监控系统测试、车牌识别准确度测试、人员越界识别准确度测试和声光报警系统分贝测试.试验结果如表1所示,安保警戒机器人具备优良的功能性,在白天及夜间均能发挥安保警戒功能,对人流进行有效的管控及警示,识别准确率较高.因车辆行进角度和光线原因,机器人视觉识别仍存在一定的误差.另外,夜间的取证准确率相对白天低,可以考虑后期在机器人头部加装照明装置,增加其夜间的可视范围.
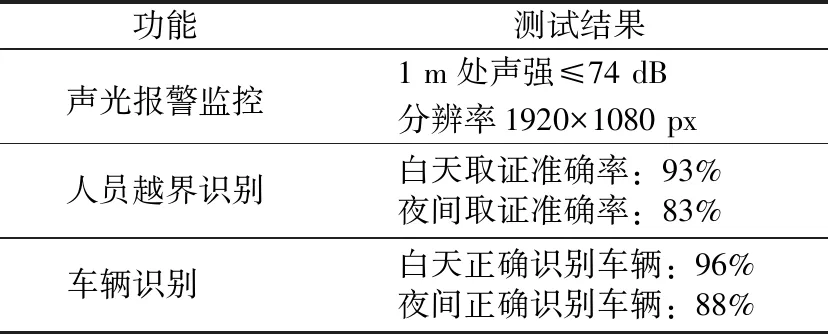
表 1 安保警戒机器人样机功能测试结果

6 结语
本研究设计了一款面向公共安全的安保警戒机器人,可临时定点安放在人流密集场所,协助公安干警疏导人流及开展警戒工作,分别对机器人前端系统设计以及后场软件系统的实现进行了论述.同时,通过测试验证了机器人的功能.机器人能够辅助完成大量安保警戒任务,大幅度减少了现场警力,有效预防了安全事故的发生.
