基于2.5维有限元法和虚拟激励法的地铁交通场地随机振动分析
2020-08-06朱志辉刘禹兵王力东王东旭
朱志辉,刘禹兵,王力东,王 凡,王东旭
(1.中南大学 土木工程学院,湖南 长沙 410075;2.中南大学 高速铁路建造技术国家工程实验室,湖南 长沙 410075;3.长沙理工大学 土木工程学院,湖南 长沙 410114;4.武九铁路客运专线湖北有限责任公司,山东 武城 430000)
随着我国轨道交通的不断发展与列车行驶速度的逐步提升,铁路交通的环境振动问题对人们的日常生活和工作产生重要影响[1],因此也越来越受人们重视。为了系统地了解轨道交通产生振动的规律和机制,就需要建立起相应的振动模型来分析研究,以便对轨道沿线做出正确的环境振动分析与评估。
近些年来,研究人员针对轨道交通引起的环境振动问题进行了大量的工作[2]。Sheng 等[3]采用半解析法研究了移动简谐荷载作用下层状土体的振动响应;之后,Sheng等[4]研究了考虑轨道高低不平顺条件下列车荷载引起的地面振动;冯青松等[5-8]通过建立车辆—轨道—路基—地基耦合系统振动解析模型,研究了轨道不平顺下耦合系统各部分的振动响应。这些解析和半解析模型具有计算工作量小、效率高的特点[7-8],但通常需要满足很多前提假定,对地基的几何形态有严格限制[9],当大地横截面并非平行土层或包含有隧道等异质结构物时,该方法便很难适用。
针对地铁列车在隧道中运行时引起的环境振动问题,数值计算方法强大的分析能力使得其比解析和半解析法能更好地适应这种复杂的结构状况[10]。2D 模型不能模拟波在三维空间的传播[11-13],而3D 模型出现计算模型大,计算步长短的情况时,会导致时间成本非常大[14-15]。假定轨道和地基的几何形状以及材料特性沿轨道方向均匀不变,这时2.5D 模型能获得较好应用。由于2.5D 模型仅在平面上进行离散,通过沿轨道方向的波数变换将3 维问题变为平面应变问题[16],使得计算效率相比3D模型大大提高。边学成[16]、高广运[17]等采用2.5D 有限元方法分析了移动轴荷载作用下的地基振动,但未考虑车辆与轨道结构的耦合。Ama⁃do[18],Jin[19]和Lopes[20]等采用2.5D 有限元法研究地铁列车引起的地面振动时,将轨道高低不平顺激励考虑为谐波不平顺激励或各谐波不平顺激励分量的叠加,但未考虑场地随机振动响应的统计特征及其变化规律。
本文基于2.5 维有限元法和虚拟激励法,通过建立轨道—隧道—地基土2.5维数值模型,对地面的随机振动特征以及车速和轨道不平顺等级对其影响规律进行研究。
1 基于虚拟激励法求解轮轨力功率谱
为构造轨道—隧道—地基土2.5 维有限元模型的外部激励,需先求出轮轨力功率谱密度函数。车辆—轨道—隧道—地基土垂向耦合模型如图1所示。移动车辆考虑为弹簧和阻尼器连接的多刚体系统,车轮与钢轨为线性赫兹弹性接触,钢轨为无限长的欧拉梁,对无砟轨道而言,当频率低于200 Hz 时,离散支撑的影响可以忽略不计[22],因此,将轨道板、隧道简化为沿轨道方向质量均匀分布的梁,用均布的线性弹簧和阻尼器模拟扣件、垫层以及弹性土体的刚度和阻尼。地基采用Winkle 地基模型,将其考虑为层状半空间体,忽略地基土的振动对耦合系统振动的影响。
考虑黏滞阻尼与应变阻尼的影响,建立轨道—隧道—地基土系统的振动微分方程[15]

式中:Er,Es和Ed分别为钢轨、轨道板和隧道的弹性模量;Ir,Is和Id分别为钢轨、轨道板和隧道的水平惯性矩;mr,ms和md分别为钢轨、轨道板和隧道的单位长度质量;zr,zs和zd分别为钢轨、轨道板和隧道的竖向挠度;cre,cri,cse,csi,cde和cdi分别为钢轨、轨道板、隧道的黏滞阻尼和应变阻尼系数;kp,km,kc和cp,cm,cc分别为单位长度扣件、弹性垫层、土体的刚度和阻尼;Fl为轨道不平顺引起的第l个轮对的动态轮轨力;v为车速;pl为初始时刻第l个轮载距原点的距离,假设第1 个轮载初始时刻位于原点处;N为车厢数量。
黏滞阻尼系数ce和应变阻尼系数ci与结构前2阶竖向自振频率ω1和ω2以及结构阻尼比ξ的关系为


式中:m为结构的单位长度质量;E为结构的弹性模量。
假定轨道不平顺为零均值高斯平稳随机过程,根据虚拟激励法[21]原理,当地铁列车在具有高低不平顺的轨道上运行时,各激励之间完全相干,车辆受到多点异相位平稳随机激励∆z(t),考虑由车轮间相对位置所产生的各轮对随机激励相位差,则有

其中,

式中:tl为第l个激励点距第1 个激励点的滞后时间;p1为初始时刻第1个轮载距原点的距离,p1=0。
轨道不平顺功率谱为波数kx表示的单边功率谱Sv(kx),由于Ω=kxv,则以时间圆频率Ω表示的单边功率谱Sv(Ω)为

设∆z(t-tl)相应的虚拟激励的轨道谐波不平顺为(t-tl),则得

假设车轮和钢轨为线性赫兹弹性接触,由轮轨接触点处位移限制条件,得到动态轮轨力求解方程[15]

其中,

式中:F(Ω)为与(Ω)对应的虚拟动态轮轨力幅值;AW和AR分别为车辆在轮对处和轨道—隧道—地基土在轮轨接触点的柔度矩阵;A∆为轮轨线性赫兹接触的柔度系数矩阵;Aw,j为第i节车厢的柔度矩阵;Kv,j,Cv,j和Mv,j分别为第j节车厢的刚度、阻尼和质量矩阵;kh为轮轨间线性赫兹弹性接触时的接触刚度;G为挠度系数;Fh为轮轨接触弹簧刚度线性化时接触点的法向力,近似取轴重;zrs,q为单位力作用于第q个轮轨接触点引起的第s个轮轨接触点处钢轨位移。
由此可得动态轮轨力的功率谱

式中:(Ω)*和(Ω)T分别为(Ω)的共轭和转置向量。
利用式(10)得到的轮轨力功率谱密度,基于虚拟激励法构造虚拟动态轮轨力激励(t,Ω)

假定各轮对具有相同的几何参数与材料参数,车辆的各轮对所历经的轨道不平顺除固定的时间差之外是完全一致的。这样,时间—空间域中虚拟动态轮轨力的分布函数(t,Ω,x)为

在频率—波数域中式(12)可表示为

式中:ω为频率—波数域内的频率。
2 基于2.5D FEM-PEM 的场地随机振动模型
2.1 轨道—隧道—地基土数值模型
本文基于2.5 维有限元—最佳匹配层法[20]建立轨道—隧道—地基土数值模型。最佳匹配层(Perfectly Matched Layers,PML)单元具有吸收任意方向的波而不产生虚拟反射的功能,且最佳匹配层区域内的波将在两侧边界之间衰减至零,PML单元中波的衰减如图2所示。

图2 PML单元中波的衰减示意图
在2.5 维轨道—隧道—地基土有限元模型关注区域外围施加最佳匹配层,在该特殊层的外边缘施加Dirichlet 和Neummann 边界条件,将关注区域和最佳匹配层区域各单元振动方程整装,得到虚拟动态轮轨力作用下轨道—隧道—地基土系统频率—波数域总振动方程[15]为

式中:KFEM(kx)和KPML(kx,ω)分别是有限元关注区域和最佳匹配层区域的总刚度矩阵;MFEM和MPML(kx,ω)分别为对应的总质量矩阵;(kx,Ω,ω)为频率—波数域中轨道—隧道—地基土系统的虚拟位移向量;(kx,Ω,ω)为频率—波数域中的虚拟动态轮轨力向量。
由式(14)中频率—波数域的虚拟位移可得到虚拟速度和加速度分别为

分别将,和经双重傅里叶逆变换,得到相应的时空域虚拟响应ud,vd和ad,时空域虚拟响应向量的共轭与转置相乘即可得到时变功率谱。因此,地面振动加速度的时变功率谱为

式中:ad(Ω,t)*和ad(Ω,t)T分别为ad(Ω,t)的共轭和转置向量。
利用式(17)的加速度时变功率谱对环境振动进行评价,第i个三分之一倍频带的加速度有效值ai[23]为

其中,
SA(ω,t)=πSA(Ω,t)
式中:ωs、ωe分别为第i个三分之一倍频带的上、下限频率,频率范围为1~80 Hz;SA(ω,t)为以频率表示的地面随机振动加速度双边功率谱密度。
按全身振动垂向计权因子修正后的加速度a′为

式中:Wi为第i个三分之一倍频带的计权系数。
Z振级计算公式为

式中:a0为基准加速度,取值为1×10–6m ∙s-2。
以列车通过时段内Z 振级的最大值VLzmax作为环境振动预测评价指标,VLzmax的计算公式为

采用频率采样三角级数法[24]反演地面振动响应时程R(t),得

其中,
式中:SR为地面随机振动响应功率谱,可为位移、速度和加速度功率谱的任1 个;R(t)和Rk分别为与SR对应的随机振动响应时程和频谱幅值;φk为0到2π 之间总数为η的随机均匀分布序列的第k个数;Ω+和Ω-分别为SR(Ω,t)的圆频率采样上、下限;∆ω为频率采样间隔。
由地面随机振动响应功率谱SR(Ω,t)可得到地面随机振动响应方差σ2(t)为

将确定性轴重向量F(t)代入式(14)中,根据前面的推导可得出确定性轴重引起的地面振动响应向量(即响应均值μ),基于3σ准则可得到地面振动响应上限值(μ+3σ)。
2.2 模型验证
选用文献[11]中的轨道—隧道—地基土参数,轨道结构采用UIC60 钢轨,轨距为1.5 m,沿轨道方向轨枕按0.6 m 离散支撑,厚和宽为0.4 和2.5 m 的轨道板。混凝土轨道板的弹性模量为28.5 GPa,混凝土轨道板的密度为2 500 kg ∙m-3,隧道的中心距地表13.5 m,隧道直径5.4 m,衬砌厚度0.3 m,具体参数如图3所示。建立如图4所示的轨道—隧道—地基土2.5D 有限元模型,分别采用解析法和2.5D有限元法计算钢轨的柔度曲线,通过在零频率处匹配钢轨响应得到等效的轨道—隧道解析模型参数[15]。用解析法和2.5D 有限元法得到的钢轨柔度系数曲线如图5所示,轨道—隧道解析模型等效参数见表1。

图3 文献[11]中的隧道—地基土模型参数
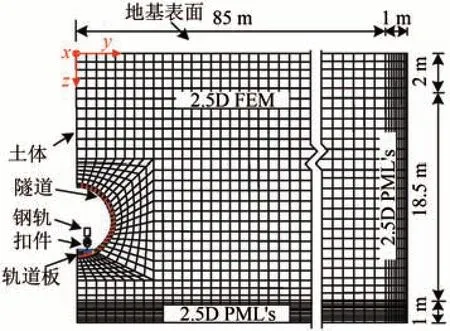
图4 轨道—隧道—土体有限元模型示意图
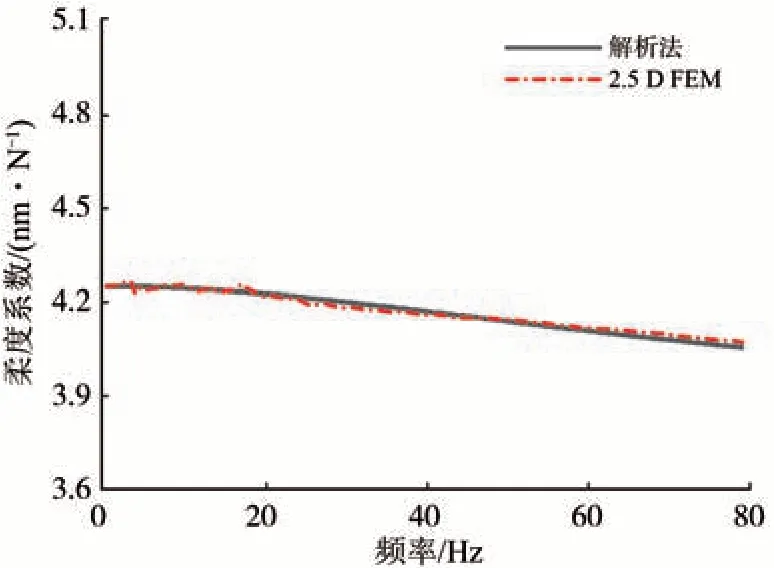
图5 钢轨柔度曲线
文献[11]中地铁列车为6节相同车厢的编组形式,车辆参数见表2。图6为利用式(22)反演的仰拱处(图3中B点)垂向振动速度时程。该结果与文献[11]结果吻合较好,验证了本文模型的可靠性。
3 地面振动影响
3.1 车速的影响
地铁列车运行速度分别选取40,60 和80 km·h-1,每次计算仅改变列车速度,轨道不平顺激励采用美国联邦铁路局(Federal Railroad Administra⁃tion,FRA)5 级轨道高低不平顺功率谱,其他参数与2.2 节相同,得到的第1 个轮对处的轮轨力功率谱密度如图7所示。
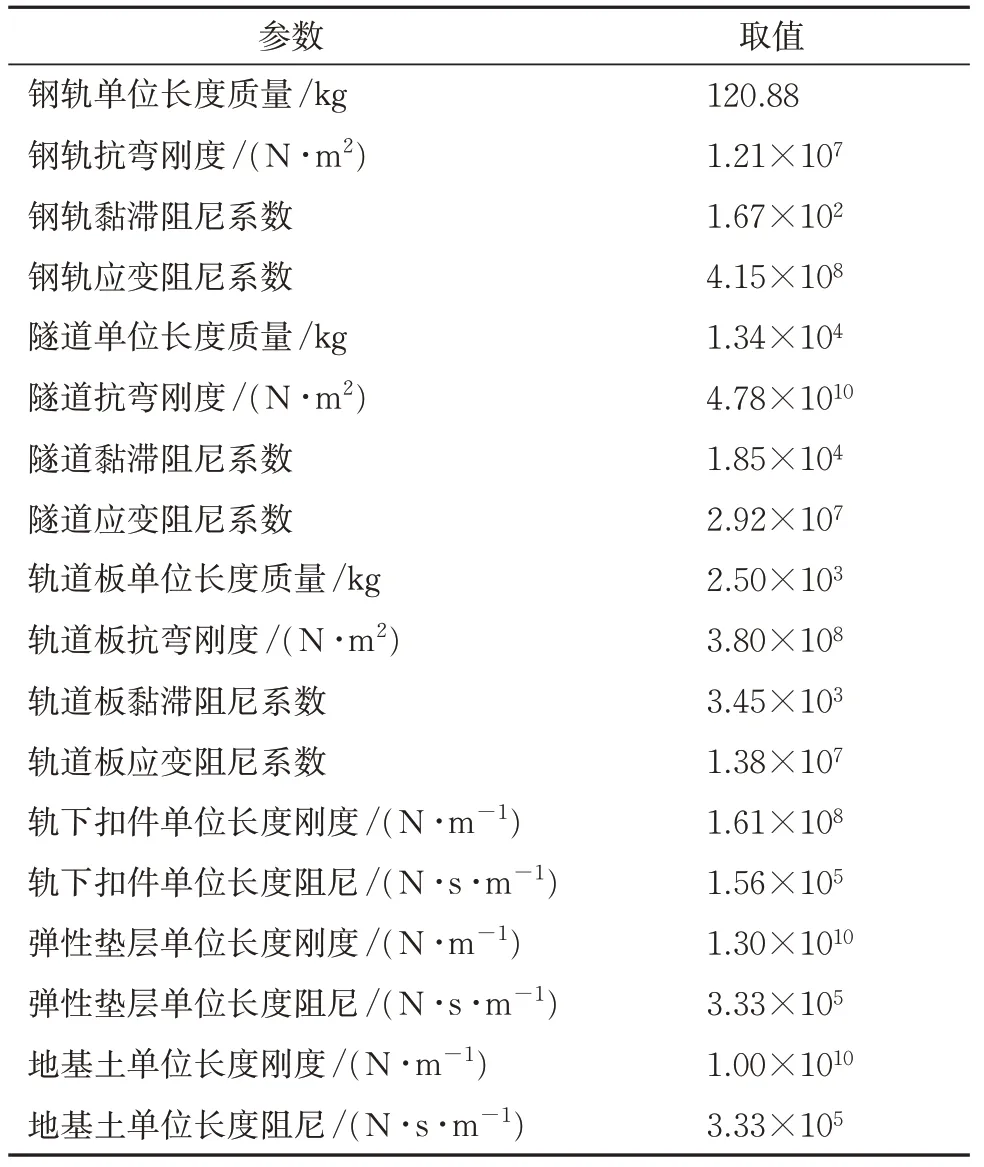
表1 轨道—隧道解析模型等效参数
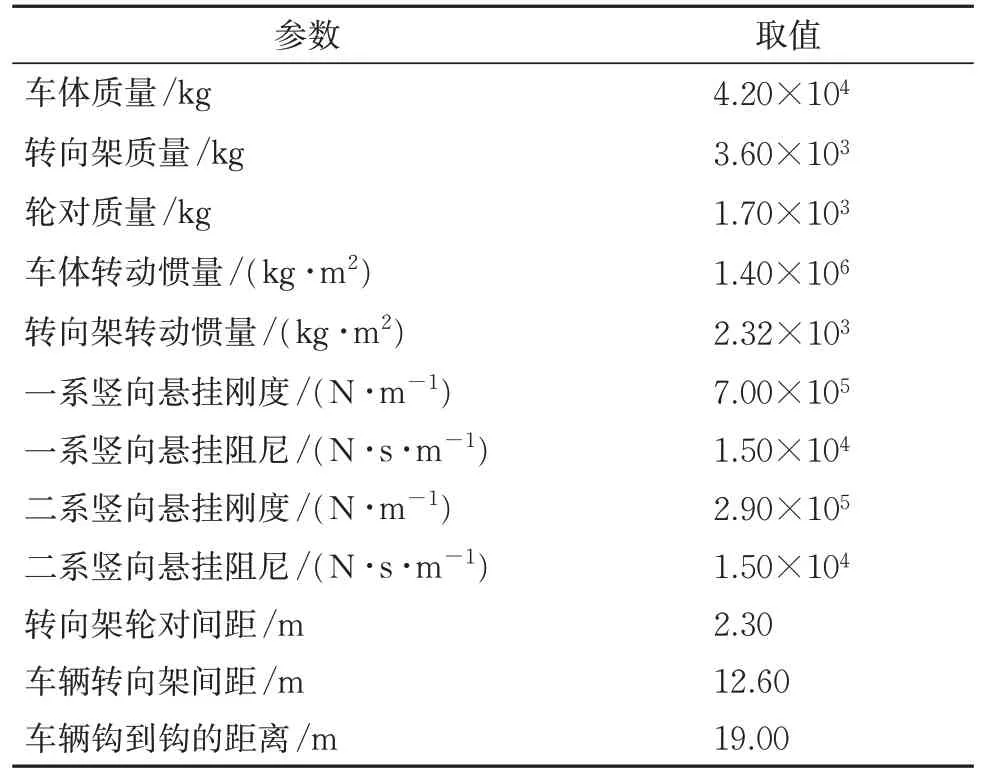
表2 车辆参数
由图7可知:轮轨力功率谱密度随着速度的增加而显著增加。车速为60 和80 km·h-1时,主频f1=0.9 Hz处动态轮轨力功率谱密度分别比40 km·h-1时增大5.22和7.39倍。
运用虚拟激励法,将图7的轮轨力功率谱密度作为不同速度条件下轨道—隧道—地基土系统2.5D有限元模型的外部激励,进行数值计算。

图6 仰拱处垂向振动速度响应时程
图8为距轨道中心线20 m 处(图3中A 点)振动响应的最大功率谱密度。由图8可知:地面振动位移以低频振动为主;振动速度和加速度以高频(40~60 Hz)振动为主且主频相同,车速为40,60 和80 km·h-1时的主频分别为45.3,46.1 和50.0 Hz,主频随着车速的增加显著增大。
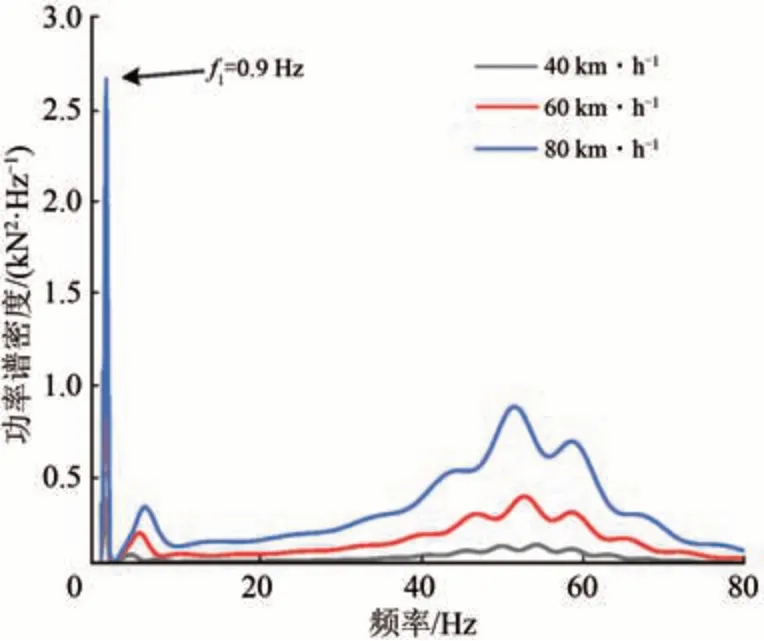
图7 不同速度下第1个轮对处的轮轨力功率谱密度
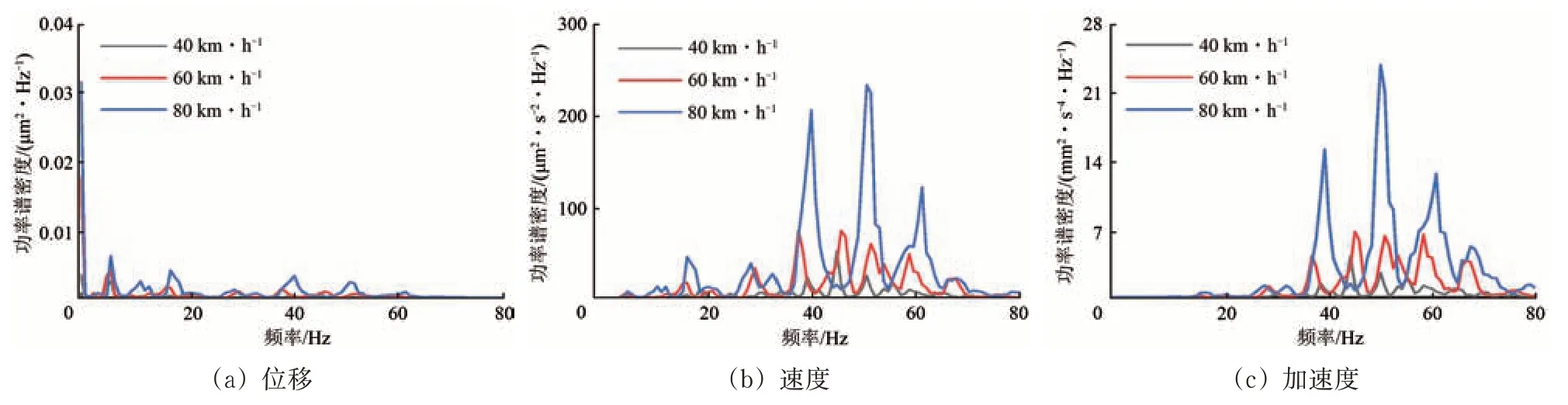
图8 不同速度下A点振动响应最大功率谱密度

图9 不同速度下A点垂向振动响应标准差
不同车速条件下A 点的振动响应标准差σ和均值μ分别如图9和图10所示。由图9可知:地面振动响应标准差随着车速增加显著增大,车速为40和80 km·h-1时的振动加速度标准差最大值分别为0.008 9 和0.025 2 m·s-2,表明车速越大,地面振动响应的离散性越大。
将图9中A 点振动响应标准差与图10的均值结果对比可知:地面振动响应上限值(μ+3σ)受确定性轴重和动态轮轨力的双重影响。地面振动位移上限值主要由确定性轴重引起,振动加速度上限值主要由动态轮轨力引起。
图11给出了地铁运行引起的场地振动上限值。由图11可知:车速的增加对场地的位移上限值影响很小,最大位移上限值出现在轨道中心线处;振动速度和加速度上限值随着车速的增加显著增大。随机动态轮轨力作用下,地面的振动速度和加速度上限值在垂直于地铁运行方向的衰减出现明显波动,最大值并不位于轨道中心线处。
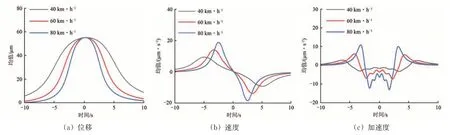
图10 不同速度下A点垂向振动响应均值

图11 场地垂向振动响应上限值
依据GB 10070-1988《城市区域环境振动标准》[25]的规定,要求居民、文教区昼间的振动容许限值为70 dB。图12给出了地铁通过过程中地面振动Z 振级最大值。由图12可知:地铁以80 km·h-1运行时,除距轨道中心线10~15 m范围内超限,其他区域符合规范要求;对于40 和60 km·h-1的运行速度,各距离处的振动均符合规范要求。
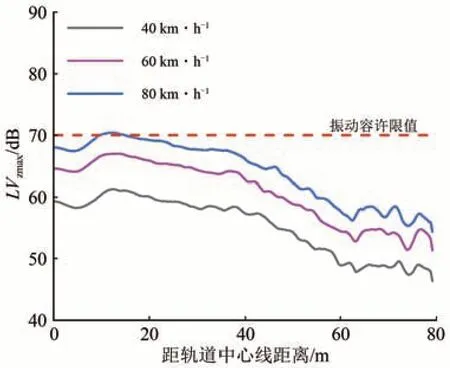
图12 不同速度下的Z振级最大值
3.2 轨道不平顺的影响
地铁列车运行速度为60 km·h-1,轨道不平顺激励选取FRA 4 级,FRA 5 级和FRA 6 级轨道高低不平顺功率谱,每次计算仅改变轨道不平顺等级,其他参数与2.2 节相同,得到的第1 个轮对处的轮轨力功率谱密度如图13所示。

图13 不同轨道不平顺下第1个轮对处的轮轨力功率谱密度
由图13可知:0.9 Hz 处的动态轮轨力功率谱密度在轨道不平顺条件为FRA 5 级和FRA 4 级时,相比FRA 6 级分别增大了6.18 和15.9 倍,这表明轨道不平顺加剧了车速对动态轮轨力的影响。
结合虚拟激励法,将图13的轮轨力功率谱密度作为不同轨道不平顺条件下轨道—隧道—地基土系统2.5D有限元模型的外部激励,进行数值计算。
地面A 点不同轨道不平顺条件下振动响应的最大功率谱密度曲线如图14所示。由图14可知:轨道不平顺等级从FRA 6 级变为FRA 4 级,振动位移、速度、加速度功率谱最大值均增大15.9倍。不同轨道不平顺下振动响应的最大功率谱密度曲线波形近似,幅值不同,说明轨道不平顺不改变地面振动响应功率谱的频谱分布特性。
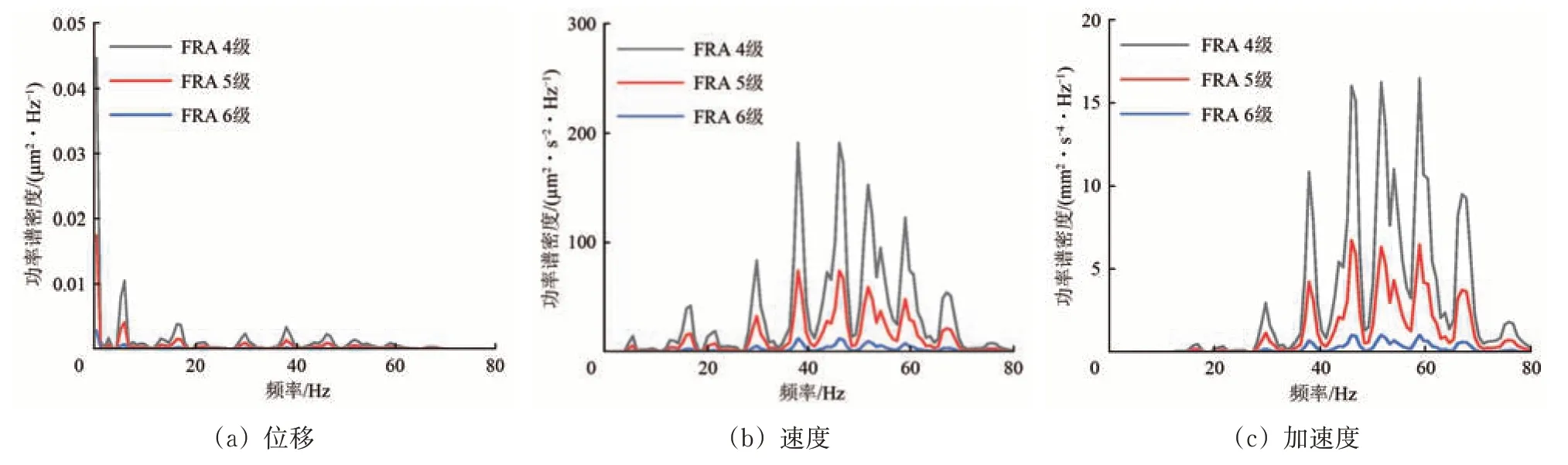
图14 不同轨道不平顺下A点振动响应的最大功率谱
图15为不同轨道不平顺条件下A 点的振动响应标准差。由图15可知:随轨道不平顺等级的降低显著增大,地面随机振动响应的离散性明显增大,轨道不平顺加剧了车速对振动响应离散性的影响。

图15 不同轨道不平顺下A点垂向振动响应标准差
图16给出了不同轨道不平顺条件下场地的振动响应上限值。由图16可知,轨道不平顺等级的降低对场地的位移上限值几乎不产生影响,位移最大值出现在轨道中心线处。结合图11可知,振动速度和加速度上限值随着轨道不平顺等级的降低显著增加,两者最大值分别出现在距轨道中心线约13 和14 m 处。距轨道中心线60 m 外,地面振动速度和加速度的衰减趋势变缓。
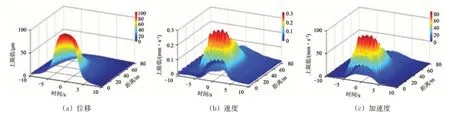
图16 场地垂向振动响应上限值
图17为不同轨道不平顺下的Z 振级最大值。由图12和图17可知:由于土体振动加速度在垂直于地铁运行方向的衰减出现明显波动现象,VLzmax曲线最大值出现在距轨道中心线13.5 m 处。距轨道中心线60 m 外,Z 振级最大值的衰减趋势变缓。当车速为60 km ∙h-1,由于FRA 4 级轨道高低不平顺的轨道平顺性较差,除距轨道中心线8~20 m 范围超限,其他区域符合规范要求;对于FRA 5 级和FRA 6 级轨道高低不平顺条件,各距离处的振动均满足规范要求。

图17 不同轨道不平顺下的Z振级最大值
4 结 论
(1)地面的振动位移主要取决于车辆的确定性轴重激励,以低频振动为主;地面振动速度和加速度以高频(40~60 Hz)振动为主。地铁车速和轨道不平顺等级的改变对地面振动位移上限值的影响很小,对速度和加速度上限值影响显著,其中加速度上限值主要由轨道不平顺激励引起。
(2)轨道不平顺加剧了地铁车速对地面振动响应标准差的影响。车速越高,轨道不平顺等级越低,地面振动响应的离散性越高,从而导致振动响应上限值越大。
(3)地铁车速的增加导致振动速度和加速度主频增大;轨道不平顺等级仅改变振动响应频谱幅值,不改变频谱分布特性。
(4)轨道不平顺随机激励下,地面振动速度和加速度的上限值以及Z振级最大值在垂直于地铁运行方向的衰减出现明显波动,距轨道中心线60 m外衰减趋势变缓。
