基于压敏漆的多羽流气动力效应试验研究
2020-07-31吴靖蔡国飙
吴靖,蔡国飙
(1.福州大学 机械工程及自动化学院,福州350116; 2.北京航空航天大学 宇航学院,北京100083)
航天器发动机工作时产生的羽流向真空中快速膨胀,会对航天器表面产生气动力效应,影响航天器的姿态控制[1-4]。当多台发动机共同工作时,羽流在膨胀过程中发生相互作用还将导致复杂的流场形态和流动特性,在相互作用区域形成羽流干扰流[5-7]。干扰流的密度和压力受到明显的增强,可能会对航天器表面造成额外的气动力。因此,研究羽流及干扰羽流的气动力效应对航天器的设计及稳定运行具有重要意义。
开展羽流气动力试验研究最常用的手段是基于测压孔的测量方法[8-9],即在模型表面加工数个至数十个离散的小孔,小孔通过导气管连接至微差压传感器,从而获得模型表面测压孔位置的压力分布,进而积分得到模型整体所受的气动力或气动力矩。这种方法虽然原理简单、精度较高,但要获得模型准确的气动载荷需要布置大量的测点,时间和经济成本较高。
压敏漆(Pressure-Sensitive Paint,PSP)表面压力测量技术,其作为一种非插入式的全场压力光学测量技术,具有空间分辨率高、准备简单、成本低等特点,并且具有与传统压力传感器相近的测量精度和响应速度,同时在测量过程中不影响流场,已成功应用于多个国家的各种风洞试验中[10-13]。目前,PSP在稀薄气体环境中的应用相对较少,仅有一些低密度条件下自由射流撞击平板的验证性试验[14-16]和高Kn数的微尺度流动试验[17-18]。
为了突破传统羽流气动力测量基于离散测压孔的局限,本文将PSP表面压力光学测量技术应用于真空羽流气动力的测量研究中,以常温空气为工质,利用PSP对单喷嘴羽流和双喷嘴干扰羽流以不同入射距离和入射角撞击平板造成的气动力分布进行测量,通过高分辨率的测量结果分析羽流及干扰羽流的气动力效应。
1 压敏漆原理及配制
PSP发光过程中包含复杂的相互作用、能量转换和光物理过程,对于工程应用,只需要从激发、辐射发光、非辐射转换和猝灭这几个主要过程对PSP的发光性质进行分析[19]。当压力变化超过一定范围时,可用非线性Stern-Volmer公式描述PSP发光强度I和PSP表面气体压力p的关系:

式中:Iref为给定参考压力pref下的PSP发光强度;A(T)、B(T)和γ(T)为与温度T相关的系数。
本文选用在低压环境下具有较高压力灵敏度和良好线性响应特性的PSP配方,以铂四(五氟苯酚)卟啉(PtTFPP)作为发光分子,以高透氧聚合物1-三甲基硅烷基-1-丙炔(poly(TMSP))作为固定发光分子的基层。PtTFPP/poly(TMSP)根据Egami等[20]的介绍进行配制以达到最佳的压力灵敏度,将4 mg的PtTFPP和80 mg的poly(TMSP)溶于10mL的甲苯中,并充分搅拌均匀,然后使用喷枪将配制好的PtTFPP/poly(TMSP)直接喷涂于模型上,置于阴暗干燥环境中保存。
2 试验系统
2.1 真空获取系统
基于PSP的羽流干扰气动力试验在一座小型真空获取系统中进行,真空舱为316 L不锈钢材质的卧式圆筒结构,长度1 015 mm,内径700mm。真空舱后端为椭圆形封头,前端为安装石英玻璃观察窗的平面封头,为光学试验提供光学通路。真空舱舱壁安装有1个冷阴极/皮拉尼全量程真空计(Pfeiffer PKR),以及4个相同的电容薄膜真空计(Leybold CERAVAC CTR),量程为1 torr(约133 Pa),精度为1%F.S.,用以监测真空舱内真空度并互相校验。真空舱配备1台螺杆泵(Leybold SV630)和2台罗茨泵(Lebold WAU2001和WH7000),舱内极限真空度可达10-3Pa。
2.2 压敏漆标定及气动力测量装置

图1 基于PSP的羽流撞击平板气动力试验系统示意图Fig.1 Experimental system schematic of aerodynamic force induced by plumes impinging plate based on PSP
基于PSP的羽流撞击平板气动力试验系统如图1所示。真空舱中设置的气动力模型为一铝质平板,平板面积相对于羽流气动力的作用范围足够大,在其表面100 mm×200 mm的范围喷涂PSP。平板中线上设置4个直径2 mm的测压孔,孔间距10 mm,第1个测压孔距离平板边缘10mm。测压孔中直接安装科莱特(Kulite)压力传感器,其测量端与平板模型表面平齐,能无延迟地响应平板表面的压力变化,参考端通过导气管延伸至远离流场的位置。2个相同的圆柱形长尾喷嘴平行放置,以干燥空气为工质在真空环境下产生羽流,气体流量2 SLPM(标准升每分钟),通过置于真空舱外的流量计控制。喷嘴出口内径de为0.6mm,间距s为9.6mm(16倍喷嘴出口内径),喷嘴和平板模型间的羽流入射距离h设置为5mm和2mm,入射角β设置为20°和10°。其中一个喷嘴的出口位于第1个测压孔的正上方。
PSP的激发光源采用Luminus公司的CBV-120UV大功率发光二极管(LED)芯片,发光峰值波长为405 nm,半波宽10 nm,光功率大于10W。LED芯片前方安装440 nm低通滤光片及凸透镜,分别用以吸收热辐射及增大光密度。PSP的发射光使用Phantom CMOS 12位高速摄像机进行采集,频率设定为100 Hz,镜头前安装570 nm高通滤光片,用以将PSP的发射光从激发光中分离出来,采集图像对应平板的分辨率约为2像素/mm。
通过运行真空泵组或通过喷嘴向舱内注入空气,使真空舱内压力可在0.5~5 000 Pa的范围内变化及维持。真空舱外的计算机负责整个试验系统的同步工作和信号采集,包括控制流量计和温度控制器,以及接收、显示并保存数据采集系统、真空计和高速摄像机采集到的信号。
2.3 试验系统坐标系
试验系统坐标系如图2所示,平板沿喷流方向为X轴,平板法线方向为Z轴,以右手定则确定Y轴。坐标原点O在单股羽流气动力试验中设置在喷嘴正下方的平板位置,在双股羽流气动力试验中设置在2个喷嘴对称点正下方的平板位置。

图2 气动力试验系统坐标系XOY平面Fig.2 XOY plane of coordinate system in aerodynamic force experiment
3 试验及数据处理流程
试验中,经喷嘴喷出的常温气流快速向真空环境中扩散形成羽流。由于羽流极其稀薄,对平板模型造成的气动热和气动力很低,因此羽流对PSP的温度改变及对模型的位置偏移可以忽略。
在风洞试验中,为了将光学探测器采集到的模型表面PSP的发光强度转换为压力,一般需在准备PSP气动力模型的同时准备PSP试样,预先在压力和温度可调的容腔中对该种PSP进行标定,获得式(1)中的标定系数,然后将光强图像转换为压力数据。模型表面由于气动热效应造成的温度不均匀会产生压力误差,往往需要同步测量表面温度分布,如利用红外相机或温度敏感涂料测量模型表面温度分布,并进行温度修正,才能减小这种误差。相比于在风洞中进行的PSP气动力试验,真空舱具有一个独特的优势,即真空舱自身可作为一个压力调节装置,直接对模型表面的PSP进行标定。因此,本文采用一种原位点对点标定法将CMOS相机采集到的图像转换为模型表面的压力分布。
3.1 试验流程
试验流程如图3所示,步骤如下:
步骤1 关闭真空舱,保持黑暗环境,开启真空泵组对舱内抽真空。
步骤2 真空舱内达到极限真空度后,打开激发光源,喷嘴喷气产生羽流,CMOS相机获取平板表面的喷气图像Iwind-on(图中暗的区域压力相对较大,亮的区域压力相对较小)。CMOS相机采集图像后停止喷流并关闭光源。
步骤3 更改喷嘴工况,重复步骤2。

图3 真空舱中进行的PSP气动力试验流程Fig.3 Flowchart of aerodynamic force experiment based on PSP in vacuum chamber
步骤4 工况完成后关闭真空泵组,并逐步向真空舱内通入空气,使真空舱内环境压力从0.05 Pa分段上升至5 000 Pa,在每一环境压力下,记录舱内真空度,打开激发光源,同时CMOS相机分别获取不同真空度下的标定图像I1,I2,…,Iref,…,In-1,In(图像亮度不均匀是由于涂料厚度和光照强度不均匀造成的)。
步骤5 真空舱复压,更改喷嘴相对平板模型的位置。
步骤6 重复步骤1~步骤5,结束试验。
3.2 数据处理流程
数据处理流程如图4所示,步骤如下:
步骤1 对连续拍摄的100帧图像求平均以消除随机误差,并截取图像中气动力作用的主要区域进行分析。
步骤2 利用2D平面图像拟合方法修复喷气图像和标定图像中的测压孔位置。
步骤3 将标定图像的每一像素点当作一个独立的PSP,通过式(1)分别计算每一像素点的标定系数,得到系数分布图。
步骤4 参考图像Iref和喷气图像Iwind-on求比值,得到比值图像。
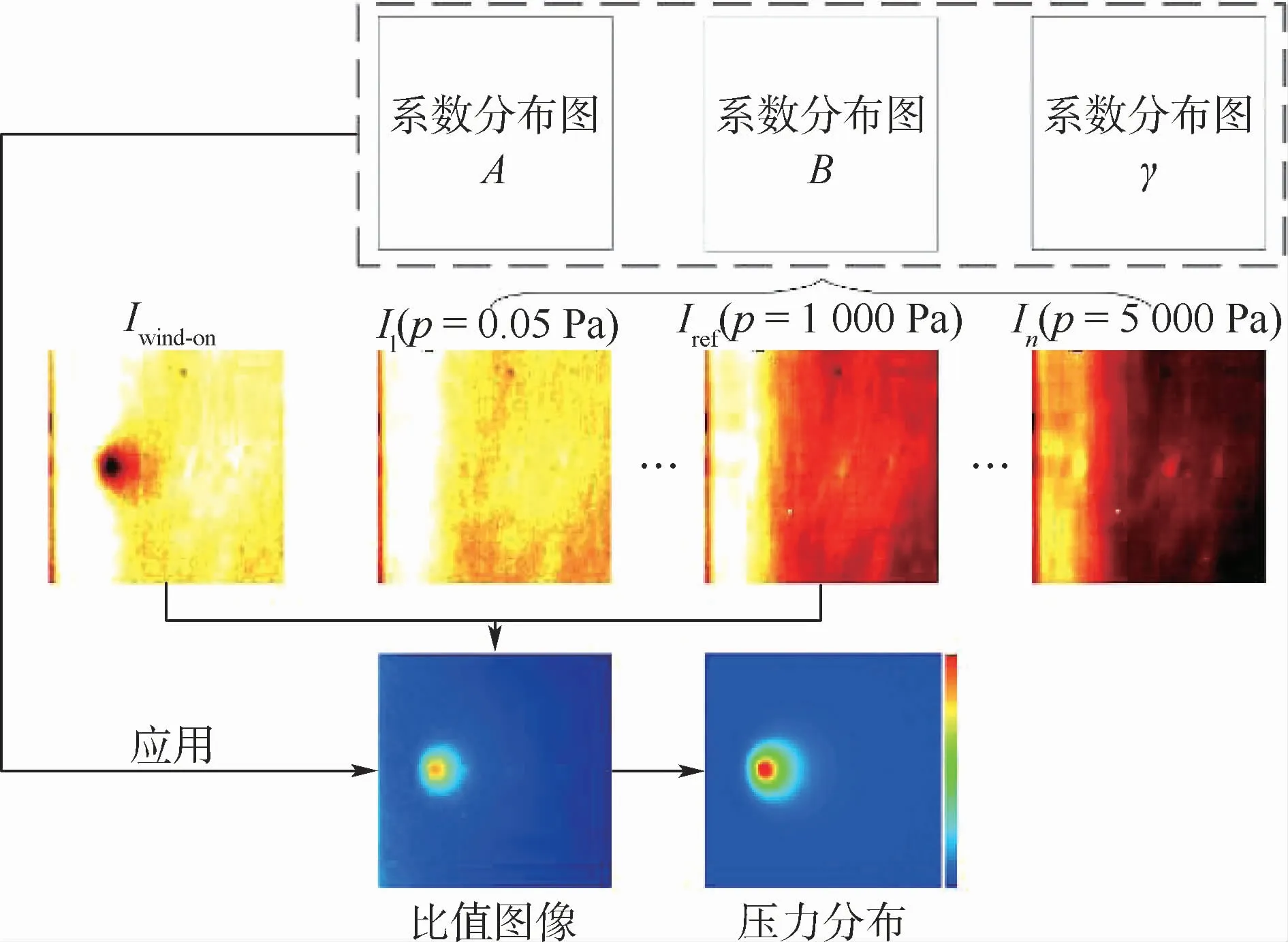
图4 原位点对点标定法计算表面压力分布流程示意Fig.4 Flowchart of calculating surface pressure distribution using in-situ point-to-point calibration method
步骤5 按照每一像素点一一对应的关系,将系数分布图通过式(1)应用到比值图像中,得到模型表面的压力分布。
通过原位点对点标定法获得的图像噪声较低、质量较高,可以不对图像进行空间滤波处理。
4 试验结果与分析
4.1 传感器与压敏漆压力比较
本文中PSP在单位面积上获取的压力值数量约为传感器的12.57倍,获取的图像每一像素均可转换为平板模型对应点压力,因此PSP的空间分辨率和数据采集量均远远高于传统基于离散测压孔的羽流气动力测量方法。

图5 Kulite压力传感器压力和PSP压力随时间变化的典型关系曲线(h=5mm,β=20°)Fig.5 Representative time-history p lots of Kulite sensor and PSP pressures(h=5mm,β=20°)
图5为Kulite压力传感器采集的压力信号和PSP经原位点对点标定法计算得到的压力数据随时间变化的典型关系曲线对比。喷嘴喷气时间设置为30 s,位于X=40mm处的Kulite压力传感器因当地压力过低而无法有效采集压力数据,故不在图中进行对比。由图5可见,在压力跃升阶段,PSP对压力的响应速度与Kulite压力传感器基本相同,证明PtTFPP/poly(TMSP)在低压环境中具有快速响应的特性,可以应用于以短时脉冲工作为主的真空羽流气动力试验中。本文中使用的Kulite压力传感器热零点漂移约为20 Pa/K,其在恒温条件下显示了良好的线性压力灵敏度,但由于传感器体积较小,热容也较小,且与平板模型保持热绝缘,羽流的气动热效应使传感器温度发生变化,导致在喷气过程中传感器热零点发生漂移,由此带来的测量误差在低压环境中无法忽略。而PtTFPP/poly(TMSP)的温度敏感度较低,且平板模型的热容比Kulite压力传感器高得多,所以模型表面PSP的温度变化极小,测量的压力数值稳定[21]。
4.2 单喷嘴羽流气动力结果分析
图6为单喷嘴羽流以不同入射距离和入射角撞击平板表面的压力分布云图,取平板包含羽流主要作用区域的50mm×50mm范围分析。可以看出,利用PSP表面压力光学测量方法获得的压力分布均匀,对称性良好,可分辨Pa级的压力变化。当入射距离相同时,入射角的减小明显降低平板表面的压力,说明羽流的气动力效应随着入射角的减小而减弱。当入射角相同时,随着入射距离的减小,压力集中区域面积减小,压力梯度增大。对于如此大的压力梯度,即使采用直径仅2mm的Kulite压力传感器,也无法准确捕捉测压孔所在位置剧烈的压力变化,只能测得当地的平均压力;而利用PSP表面压力光学测量方法则可以获得每一像素点的所在位置压力,描绘大梯度下的压力变化趋势,准确地给出压力最大值所在的位置。若提高采集图像的分辨率,还可以进一步提高压力峰值测量的准确性。
图7对单喷嘴羽流在不同入射距离和入射角时平板中线上的压力分布曲线进行了比较,压力最大值及相应位置在表1中列出。图7中可以明显看出单喷嘴在不同姿态下羽流气动力的大小及主要作用范围。压力最大值位于喷嘴出口正下方平板的下游位置,受气流攻角的作用,入射角为10°的压力作用范围比入射角为20°的压力作用范围向喷流下游方向移动,其中最大值点位置移动0.5 mm。入射距离2 mm的工况在入射角20°和10°时压力的最大值分别大约为入射距离为5mm时的5.4倍和4.5倍,说明入射距离的减小极大地增强了平板表面的局部压力。而在最大值下游的部分区域内(X>5mm),入射距离2mm工况的压力开始小于5mm工况的压力,并随着喷流向下游移动而逐渐趋近于0。相比于入射距离5mm工况,2mm工况的压力集中区域更窄,压力最大值位置向上游移动了1.5 mm,更接近喷嘴出口。
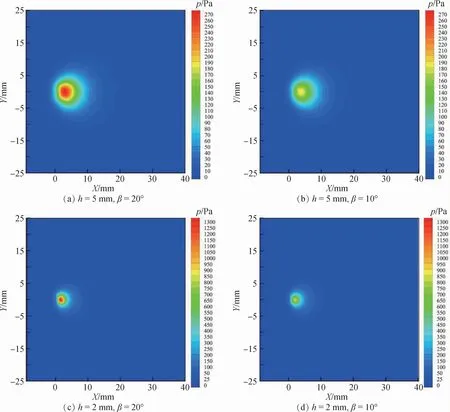
图6 单喷嘴羽流撞击平板模型表面压力分布云图Fig.6 Surface pressure distribution contour of single-nozzle plume impinging plate model
图7 单喷嘴羽流在不同入射距离和入射角时沿平板中线上的压力分布曲线Fig.7 Pressure distribution curves along plate center line of single-nozzle plume with different incident distances and angles
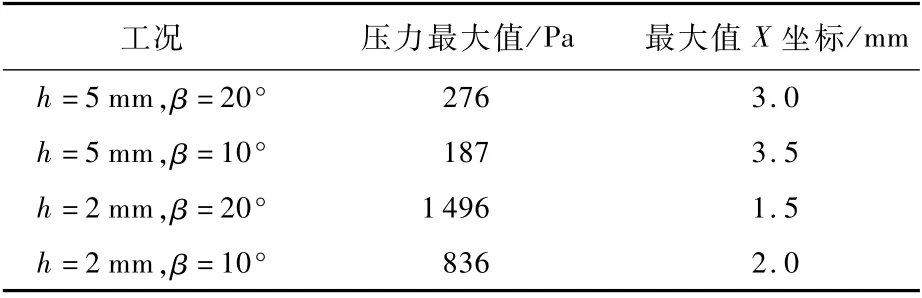
表1 单喷嘴羽流在不同入射距离和入射角时平板中线上的压力最大值及位置Table 1 Maximum pressures and their locations on plate center line of single-nozzle plume with different incident distances and angles
4.3 双喷嘴干扰羽流气动力结果分析

图8 双喷嘴干扰羽流撞击平板模型表面压力分布云图Fig.8 Surface pressure distribution contour of dual-nozzle interacted plumes impinging plate model
图8为流量同为2 SLPM的双喷嘴干扰羽流以不同入射距离和入射角撞击平板表面的压力分布云图。不同入射距离和入射角度的双喷嘴干扰羽流压力云图同样有很好的均匀性和对称性,显示了双喷嘴工作状态的一致性。与单喷嘴工况类似,在喷嘴正下方平板沿X方向的下游位置,出现了对应于2个喷嘴的压力集中区域。而在2个压力集中区域中间,出现了新的压力增强区域,这是由于来自于喷嘴的两股羽流在流场中相互干扰,形成了压力和密度都增强的羽流干扰流,干扰流撞击到平板上,使得该处的压力增大。羽流相互作用还使得平板上压力集中区域下游处的气动力也得到了增强,表现在压力云图形成了向下游突出的形状,并且随着向下游的发展,气动力的增强向平板两侧扩展。入射距离为5mm时,羽流相互作用产生的干扰流对平板表面产生的气动力增强效应明显,平板中线上的最高压力接近羽流主流撞击产生的压力,从而形成了将羽流主流产生的压力集中区域“连通”的图像;而入射距离为2mm时,由于喷嘴距离平板模型较近,流场中的羽流相互作用未充分发展,因此干扰流造成的气动力压力相对于主流压力较低。
以入射距离5mm、入射角20°为例比较双喷嘴干扰羽流相对于单喷嘴羽流对平板气动力效应的增强作用。图9为单、双喷嘴羽流气动力沿Y方向且经过压力最大值(即X=3 mm)的压力分布对比。可以看出,单、双喷嘴工况下平板压力关于X轴均显示了良好的对称性;双喷嘴干扰羽流对平板形成了2个压力峰,压力峰值与单喷嘴压力峰值相同;2个压力峰值之间由于羽流相互作用对气流的增强作用,造成了气动力的增强作用,形成一个新的表面压力极大值。图9中沿Y方向气动力增强的范围约为±1.4mm,其余范围气动力未受到羽流相互作用的影响,与单喷嘴羽流气动力压力分布保持一致。
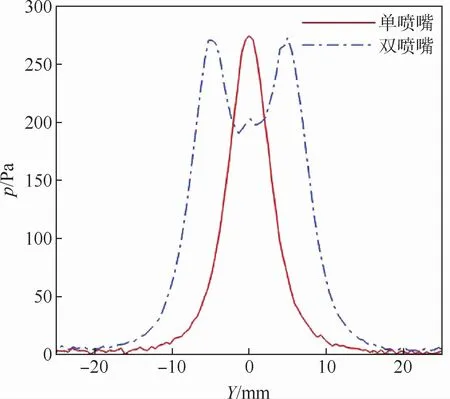
图9 单、双喷嘴羽流沿平板X=3mm的压力分布对比Fig.9 Comparison of pressure distribution along line X=3mm on plate between single-and dual-nozzle plumes
图10为双喷嘴干扰羽流气动力沿平板中线的压力分布与单喷嘴羽流在相同轴线偏移线(即图6(a)中Y=4.8mm)上的压力分布比较。可以看出,双喷嘴干扰羽流压力明显高于单喷嘴羽流压力,再次说明了羽流相互作用对气动力效应的增强作用。单、双喷嘴羽流压力的最大值位置相同,在X=4.5 mm位置,处于喷嘴轴线投影线压力最大值的下游;最大值分别为77 Pa和219 Pa,双喷嘴干扰羽流压力最大值是单喷嘴的2.84倍,且其余位置的双喷嘴压力均为单喷嘴压力的2~3倍,说明干扰羽流产生的气动力效应不能用单股羽流的气动力效应进行简单的线性叠加。在返流区(X<0),双喷嘴干扰羽流压力高于单喷嘴羽流压力,这是由于羽流相互作用使气体分子相互碰撞的概率增大,从而提高了羽流返流的流量,使平板返流区的压力增大,这证明了羽流相互作用对羽流返流的增强作用,并将带来额外的气动力、热、污染效应,在航天器的设计中需要进行考虑。
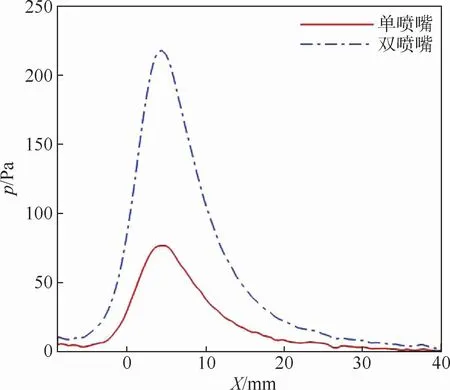
图10 双喷嘴干扰羽流气动力沿平板中线的压力分布与单喷嘴羽流在相同轴线偏移线的压力分布比较Fig.10 Comparison of pressure distribution of aerodynamic force along center line of p late in dual-nozzle interacted plumes and along the same off-axis line in single-nozzle plume
5 结 论
本文采用在低压环境中具有快速响应特性的压敏漆PtTFPP/poly(TMSP)对单喷嘴羽流和双喷嘴干扰羽流撞击平板的气动力效应进行了试验研究和分析,结论如下:
1)通过对比压力传感器及PSP测量的压力数据,证明了PtTFPP/poly(TMSP)在羽流气动力测量中具有快速响应、温度敏感度低的特性,能分辨Pa级的微小压力变化;且PSP测量压力的空间分辨率高,数据获取量大,全场压力测量能捕捉大梯度的压力变化,更加真实、准确地描述羽流气动力效应。
2)羽流相互作用给平板表面气动力带来了增强效应,在双喷嘴各自的压力集中区域之间形成压力增强区域;当入射距离较大时,干扰羽流造成的气动力增强作用明显,增强程度大于单喷嘴羽流压力的2倍;而当入射距离较小时,流场中的羽流相互作用未充分发展,干扰羽流造成的气动力压力相对于主流压力较低。
3)羽流相互作用使得羽流返流流量增大,返流区平板压力升高,证明了对羽流返流的增强作用,这会对航天器带来额外的气动力、热、污染效应,在羽流防护设计时应予以考虑。