基于解耦优化和环流APF的多平台协同攻击任务规划
2020-07-31贾正荣卢发兴王航宇
贾正荣,卢发兴,王航宇,*
(1.海军工程大学 舰船综合电力技术国防科技重点实验室,武汉430033;2.海军工程大学 兵器工程学院,武汉430033)
多平台协同攻击任务规划问题是任务分配与航路规划的综合问题。任务分配为每个攻击平台指派一个需要打击的目标;航路规划根据任务分配的结果,生成一个满足运动约束,规避障碍、规避攻击平台间航路冲突,且尽量同时到达的航路。
在理论上,任务分配与航路规划是耦合的。在任务分配时,需要考虑航路可行性、航路长度等参数,这些参数需要完成航路规划才能得到;而航路规划又需要任务分配的结果才能进行。然而,如果完全考虑任务分配与航路规划的耦合,在优化求解任务分配方案时,针对每个待评估的任务分配方案都实际地执行航路规划过程,计算量将无法接受。
针对任务规划中的耦合问题,现有研究的解耦框架可以分为2种:①任务分配—航路规划—航路调整。先单独进行任务分配过程[1-4],之后根据任务分配的结果进行独立的航路规划,最后考虑协同任务需求,对得到的航路进行调整[5-6]。②预估航程—任务分配—协同航路规划。先预估航程参数,之后以预估的航程参数作为参考进行任务分配,最后进行协同航程规划,如文献[7-8]。相比第1种框架,第2种框架由于多了预估得到的航程参数,在任务分配过程中得到更加利于协同航路规划的结果。
现有研究在多平台协同攻击任务规划及任务规划解耦方面给出了一定的方法参考,但是为了进一步提高规划效率(求解可行性与求解速度),明确方法应用场景,还需要针对以下问题开展研究。
首先,在解耦方面,航程的预估方法对于后续任务规划至关重要[8],但是目前缺少对于航程预估方法的归类与定量比较。需要在不同场景下对航程预估方法进行定量分析以给出应用建议。
其次,在航路规划方面,多平台协同攻击问题对于航路规划的求解速度、求解可行性有较高要求,以适应复杂多变的作战环境。目前主流的航路规划方法较多,包括Dubins方法[9],voronoi方法[10],人工势场(APF)方法[11],网格、航路点插值方法[12-13]及样条曲线插值航路点方法[14-15]等。其中,航路点插值方法、Q学习方法的航路调整需要事先全局地进行,实时性难以满足在线航路规划的要求。而实时性较好的Dubins方法与APF方法中,Dubins方法难以适应较为复杂的障碍环境,APF方法存在局部极小值(无解)的问题。需要给出一种求解速度快、求解可行性高的航路规划方法。
针对以上问题,本文给出一种用于多平台协同攻击任务规划的方法。采用“预估航程—任务分配—协同航路规划”的解耦框架,给出基于独立航路规划的解耦(ID)与基于直接距离的解耦(DD)2种解耦方式。在任务分配方面,给出了多平台协同攻击任务规划的目标函数与约束条件,并采用遗传算法进行任务分配方案求解;在航路规划方面,在传统APF方法的基础上,提出环流APF方法,解决了传统APF方法因局部极小值而无解的问题。
1 解耦方式
1.1 基于独立航路规划的解耦
在任务分配前,对于每个攻击平台与每个目标的组合,在假设只有1个攻击平台和1个目标的条件下,在障碍环境中进行航路规划,得到航程的预估值。
引入航路长度矩阵D=[dγη],dγη为攻击平台γ到目标η的航路长度。在ID方式下,dγη由实际的航路规划过程得到。
1.2 基于直接距离的解耦
直接以攻击平台与目标的距离作为航程的预估值。
在DD方式下,dγη为

式中:Xs,γ为攻击平台γ的初始位置;Xg,η为目标η的位置。
可见,ID方式由于实际地执行了航路规划过程,考虑了环境中的障碍,得到的航程预估值更加真实,因而在理论上具有更高的精度;而DD方式以直接距离作为航程预估值,无需进行实际的航路规划,因此计算耗时更少。
2 任务分配
任务分配方案表示为矩阵A=[μγη],矩阵维度为np×nt,表示np个攻击平台对nt个目标的分配方案,矩阵元素μγη取0或1,1表示攻击平台γ分配至目标η,0表示未分配。
可以采用遗传算法等方法进行任务分配[16-17]。基于遗传算法的任务分配求解有较多的方法参考,这里不再赘述,只给出目标函数与约束条件。特别地,在实际应用中,如果任务对象较少,可以压缩遗传算法中的种群规模以提高计算效率,也可以采用其他的任务分配优化算法[18-19]。
2.1 目标函数
考虑3个子指标,分别为打击目标价值总和、攻击平台与目标距离极差、攻击平台与目标距离总和,通过加权综合的方式形成总指标。
1)打击目标价值总和
设攻击平台γ对目标η的毁伤概率为pk,γη,目 标η的 价 值 为ψη,则 打 击 目 标 价 值 总和Hk为

Hk表示考虑毁伤概率情况下,任务分配方案能够达到的打击目标价值总和。
2)攻击平台与目标距离极差
为使分配至同一目标的所有攻击平台能够尽可能同时到达目标,在进行任务分配时,就应当尽量减少这些攻击平台到目标的距离差。
在不同的解耦方式下,航路长度矩阵D =[dγη]的计算方法不同。得到矩阵D后,攻击平台与目标距离极差指标HD,minmax为
式中:dminmax,η为所有分配至目标η的攻击平台与目标η距离的极差;HD,minmax为所有dminmax,η的最大值,取负值表示HD,minmax指标越小越优。
3)攻击平台与目标距离总和
为使攻击平台的攻击航程尽量小,需要考虑攻击平台与目标距离总和,该指标HD,sum表示为

取负值表示HD,sum指标越小越优。
4)加权目标函数
设权值向量α=[αk,αD,minmax,αD,sum]T,有αk,

则加权总指标H为

2.2 约束条件
任务分配过程中,考虑分配数量约束与航程约束。而攻击平台运动约束、障碍规避、航路交叉规避均由航路规划过程完成。
1)分配数量约束
每个攻击平台必须分配一个打击目标:

2)航程约束
分配方案不超过每个攻击平台的最大航程,即对于∀γ,有

式中:lmax.γ为攻击平台γ的最大航程。
3 协同航路规划
采用环流APF方法进行多平台的协同航路规划。传统APF方法形式简单,能够在线运行,求解速度快,但是存在局部极小值问题,导致航路规划无解。环流APF方法通过改变斥力势场的作用方向,避免了局部极小值。
3.1 环流APF方法


环流APF方法的引力势场与传统方法相同,区别在于斥力势场。在这2个方向中,环流APF方法斥力势场与攻击平台原有的运动方向尽量一致。记攻击平台航向的方向单位向量为Vp=[cosβp,sinβp]T,βp为攻击平台航向,则Fc,r,i为

为便于理论分析,引入理想移动平台的概念,理想移动平台总能沿着势场方向运动。环流APF方法能够保证理想移动平台航路规划有解。
值得注意的是,限定障碍为凸障碍的目的是:对于每个障碍而言,攻击平台与障碍之间的距离最小值点有且只有一个。而在凹障碍中,当攻击平台处于障碍凹陷部分时,可能会出现多个攻击平台与障碍的距离最小值点,从而无法定义障碍对于攻击平台的斥力。因此在求解之前,一般需要对环境中的障碍进行凸化处理。
定理1 在凸障碍环境中,环流APF方法的势场不存在局部极小值。
证明 采用反证法进行证明。设凸障碍环境中,环流APF方法的势场存在局部极小值点Xmin,即对于Xmin≠Xg,Xg为航路终点位置(即目标位置),有

式中:Fc(Xmin)为Xmin处的环流APF方法合势场;Fc,a为环流APF方法引力势场;Fc,r为环流APF方法斥力合势场。此时,Fc,a与Fc,r的分布如图1所示。
图1 合势场为0的情况Fig.1 Situation of resultant potential field being 0
设Vp(X)为指向Xmin处的单位向量。由于Xmin是局部极小值,因此存在Xmin的去心邻域,该去心邻域内的所有位置势场均指向Xmin。因而也存在位置微元δX,Vp(Xmin+δX)与Vp(XminδX)均指向Xmin,由于Vp是单位向量,因此有

注意到,环流APF方法斥力势场的方向定义,当攻击平台分别处于Xmin+δX与Xmin-δX位置并且航向指向Xmin时,攻击平台航向相反,环流APF方法斥力势场的方向也相反(见图2),即

图2 斥力势场相反的情况Fig.2 Situation opposite to repulsive potential fields

其中,由于Xmin不是终点,因而Fc,a≠0,与假设矛盾。因此Xmin不是局部极小值点。 证毕
定理说明,对于理想移动平台,环流APF方法能够保证有解,对于实际的移动平台,其角速度与角加速度是受限的,实际中仍然可能出现无解的情况。
3.2 同时到达控制策略
为使多个攻击平台同时到达目标位置,需要对攻击平台的航程进行控制。控制航程的原则是:对于到达目标所需时间较少的攻击平台,通过引入虚拟目标点(作为环流APF方法引力源)的方式延长航程。
1)预估到达时间
攻击平台从初始位置到达目标位置的时间ta由两部分构成,分别为已经航行的时间tp与剩余需要航行的时间tr,即

对于未完成的航路,已经航行的时间tp是已知的,而剩余需要航行的时间tr则需要进行估计,估计方法是计算攻击平台完成从当前位置到目标位置的直线航程所需的时间,即

式中:vs为攻击平台速度。
对于每一个攻击平台γ,可以得到该攻击平台的预估到达时间为


2)虚拟目标点构建

得到与Y垂直的向量Y⊥,即YTY⊥=0。从而构建虚拟目标点位置X*g为
图3中,虚拟目标位置处于方向Y指向的半圆上(不包括半圆的2个端点)。通过这种构建,Xs所受引力的方向发生改变,但是仍然与Xs→Xg方向一致,因此存在引力的分量使Xs向Xg运动,进而在理想情况下(不存在障碍),Xs与Xg之间的距离会不断减少,Xs仍然会运动至真实终点Xg位置。
另外,由于存在2个与Y=[xY,yY]T垂直的方向Y⊥,+=[-yY,xY]T与Y⊥,-=[yY,-xY]T,因此还需要对Y⊥,+与Y⊥,-进行选择。可以基于规避其他攻击平台的原则进行选择,即对于其他攻击平台Xs,γ,统计(Xs,γ-Xs)TY⊥,+>0(即攻击平台Xs,γ在Y⊥,+方向)与(Xs,γ-Xs)TY⊥,-≥0(即攻击平台Xs,γ在Y⊥,-方向)的攻击平台数量,选取数量较少的方向作为Y⊥。
控制引力点合成即确定系数c与d,由于攻击平台在环流APF方法的控制下运动较为复杂,难以采用解析方式给出一种最优控制策略进而确定系数c与d,因此采用一种启发式的方法对系数c与d进行分配。分配的原则是:当^τγ偏离基准τref越远,分配的c值越小,对应虚拟目标位置X*g越偏离真实目标位置Xg,从而进行更为剧烈的调整。
对于需要进行到达时间调整的攻击平台,选取
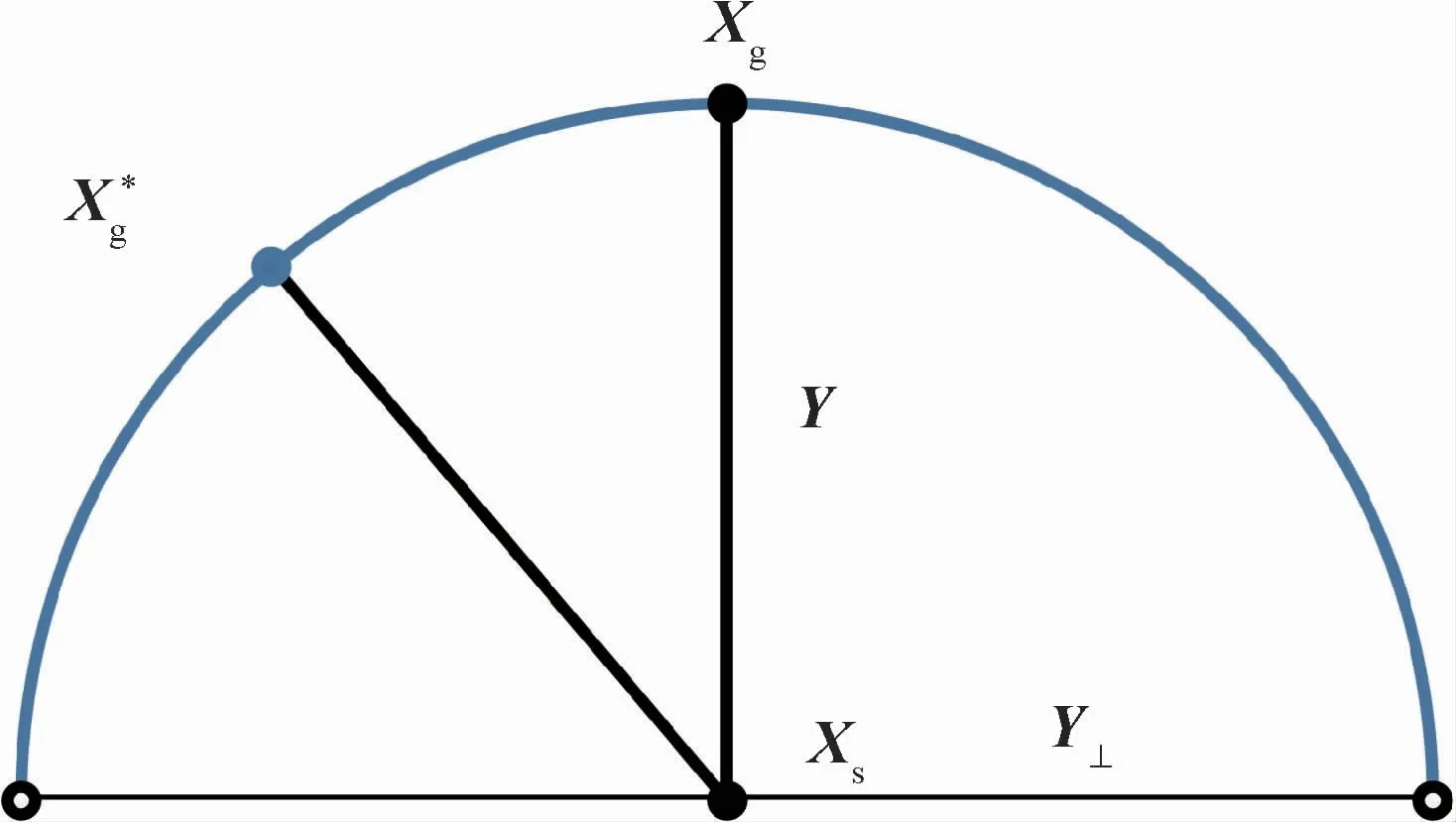
图3 虚拟目标位置的选择Fig.3 Position selection of virtual target position
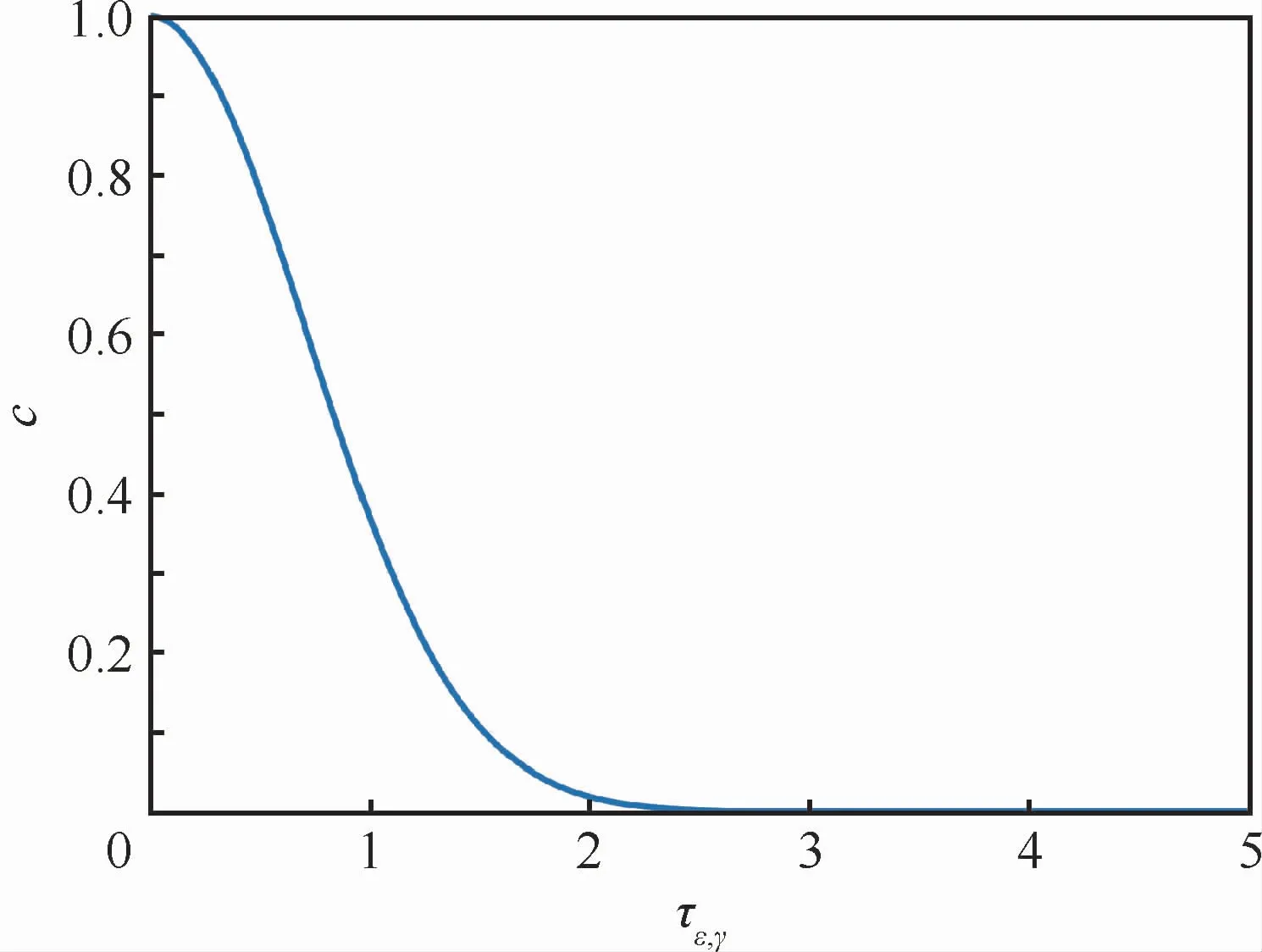
图4 系数分配Fig.4 Coefficient allocation
3.3 航路冲突规避策略
为了规避与其他攻击平台航路的交叉,可以将其他攻击平台当作斥力源,设其他攻击平台提供的斥力势场为Fc,p。因此,合势场变为

4 仿真分析
在不同场景下通过3种方式(耦合方式、ID方式、DD方式)求解任务规划方案,对解耦方式进行分析。另外,对于每种任务分配方案,分别采用传统APF方法、环流APF方法进行航路规划求解,以验证环流APF方法的有效性。
4.1 任务规划结果对比
在每种场景下,任务分配的求解参数为:种群数量500,连续15代最优指标差值小于10-3收敛,每一代保留前20%指标的种群,交叉种群比例30%,每个基因交叉位数30%,变异种群比例5%,每个基因变异位数30%。权值分配为0.60(打击目标价值总和)、0.20(攻击平台与目标距离极差)、0.20(攻击平台与目标距离总和)。航路规划的求解参数为:时间步长0.3 s(300 ms),攻击平台最大角速度1 rad/s,斥力作用距离12,速率3/s,同时到达控制允许时间误差3%。不失一般性,在求解过程中,所有长度去量纲化。
每个场景下的毁伤概率、目标价值、任务分配结果通过表1~表6给出,攻击平台的初始位置、初始航向与航路规划结果在图5~图11中给出。攻击平台通过前缀P-表示,目标通过前缀T-表示。
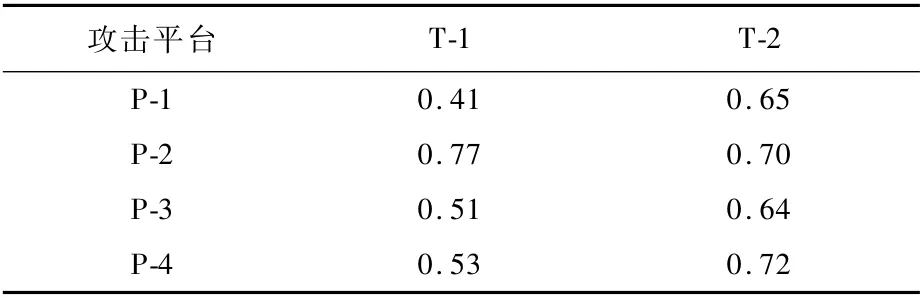
表1 攻击平台对目标的毁伤概率(场景A)Table 1 Kill probabilities of attack platforms to targets in Scenario A

表2 目标价值(场景A)Table 2 Target value in Scenario A
表3 任务分配结果(场景A)Table 3 Task assignment results in Scenario A
表4 攻击平台对目标的毁伤概率(场景B)Table 4 Kill probabilities of attack platforms to targets in Scenario B

表5 目标价值(场景B)Table 5 Target value in Scenario B
表6 任务分配结果(场景B)Table 6 Task planning results in Scenario B
图5 ID解耦与耦合方式下环流APF方法和传统APF方法的航路规划结果(场景A)Fig.5 Path planning results of circulating APF and traditional APF with ID decoupling method and coupling method(Scenario A)
1)场景A
在ID 解耦方式下,环流APF方法与传统APF方法得到的航路相同,如图5所示。
在DD解耦方式下,P-4需要经过大块障碍之间的区域到达目标位置,此时采用传统APF方法因局部极小值问题无解,如图7所示,而采用环流APF方法则有解,如图6所示。

图6 DD解耦方式下环流APF方法的航路规划结果(场景A)Fig.6 Path planning results of circulating APF method with DD decoupling method(Scenario A)

图7 DD解耦方式下传统APF方法的航路规划结果(场景A)Fig.7 Path planning results of traditional APF method with DD decoupling method(Scenario A)
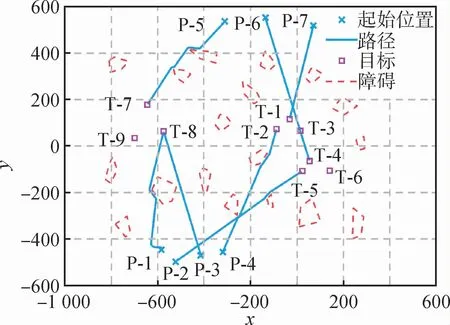
图8 环流APF方法的航路规划结果(场景B)Fig.8 Path planning results of circulating APF method(Scenario B)
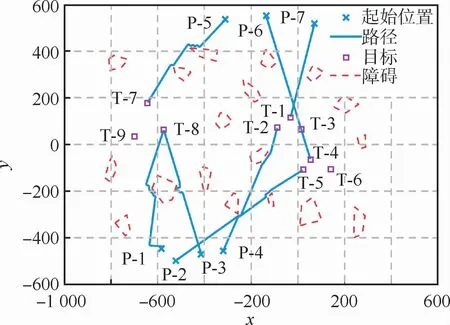
图9 传统APF方法的航路规划结果(场景B)Fig.9 Path planning results of traditional APF method(Scenario B)

图10 环流APF方法的航路规划细节(场景B)Fig.10 Path planning result details of circulating APF method(Scenario B)
图11 传统APF方法的航路规划细节(场景B)Fig.11 Path planning result details of traditional APF method(Scenario B)
2)场景B
在场景B中,障碍较为稀疏,耦合方式、ID解耦、DD解耦得到了相同的任务分配结果。在航路规划方面,传统APF方法与环流APF方法均有解,如图8和图9所示,但是传统APF方法存在航路振荡的问题,如图11所示,而环流APF方法得到的航路较为平滑,如图10所示。
4.2 结果分析
给出每个场景下,采用不同规划方式得到的优化总指标,并统计任务分配耗时与航路规划单步耗时,如表7所示,其中,优化总指标没有单位。
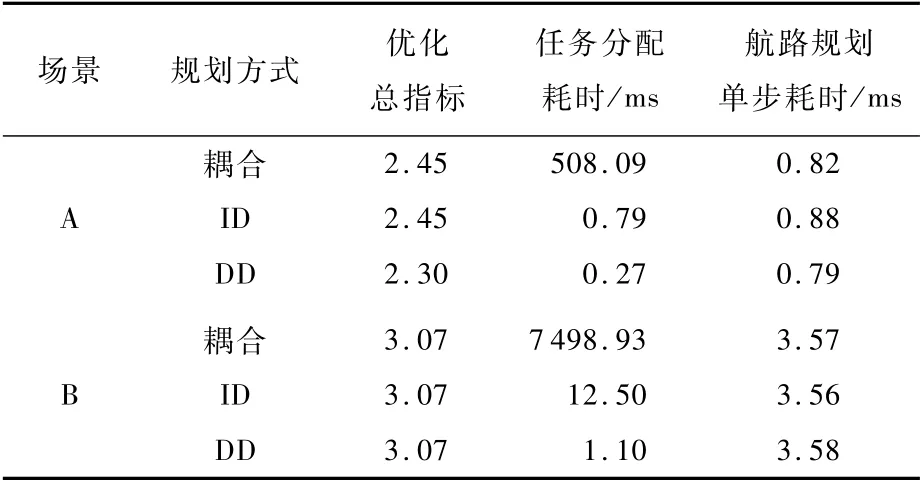
表7 不同规划方式下的指标与计算耗时对比Table 7 Index and time consumption comparison of different planning methods
根据结果可得:
1)耦合方式、解耦方式均能够在给定场景下给出满足约束条件的可行任务规划方案。ID方式得到的指标值与耦合方式相同,优于DD方式。
2)采用解耦方式后,相比于耦合方式,能够显著减少计算耗时。如表7所示,在场景A与场景B中,耦合方式与ID解耦方式得到的结果均相同,但是耦合方式计算耗时明显过长,这是由于在求解任务分配时,每一个生成的任务分配方案都需要通过实际航路规划过程得到航路后再计算目标函数值。而解耦方式下,只需要在任务分配前进行航程的估计。
3)当存在大块障碍,建议采用ID解耦方式。场景A中存在大块障碍,导致攻击平台到目标的实际航程与其直线距离相差较大,因此需要采用ID方式求解得到实际航程用于后续任务分配。
4)当障碍较为稀疏时,建议采用DD解耦方式。场景B中障碍较为稀疏,攻击平台到目标的实际航程与其直线距离接近,可以采用DD方式以直线距离作为航程的预估值。
5)采用环流APF方法可以提高航路规划的求解可行性,并提升航路性能。在场景A中,采用DD方式解耦时,传统APF方法的航路在障碍垂直于攻击平台运动方向(P-3)时,遇到局部极小值而无解,而采用环流APF方法则有解;在场景B中,虽然传统APF方法与环流APF方法均有解,但是如图10所示,环流APF方法得到的航路更为平滑,没有图11中传统APF方法的振荡现象。
5 结 论
采用解耦方式进行多平台协同攻击任务规划,相比耦合方式,可以明显减少计算量。
1)在解耦方式的应用方面,ID方式适合于存在大块障碍的场景,在这种场景下,攻击平台与目标的实际航程和其直线距离相差较大,采用ID方式能够得到更为真实的航程,代价是计算量相比DD方式有一定增加;DD方式适合于障碍稀疏的场景中,此时攻击平台与目标的实际航程和其直线距离相差相近,采用DD方式能够显著减少计算量。
2)在航路规划方面,由于环流APF方法能够避免传统APF方法因局部极小值而导致的无解问题,且能够在线运行,求解速度快,更适合作为多平台协同攻击任务规划中的航路规划方法。