港口水域使用雷达的局限性及对策
2020-07-20胡晓慧
胡晓慧
一、引言
由于港口水域航行环境和海上开阔水域存在明显差异,雷达设备存在诸多性能限制,因而在港口水域使用雷达应与在海上开阔水域有所区别。本文根据上海港的航行环境和雷达使用情况,就雷达设备的性能限制、图像调节等方面,探讨在港口水域使用雷达时的注意事项,以提醒驾引人员注意因雷达设备的性能限制和复杂航行环境所带来的风险。
二、在港口水域使用雷达设备的局限性
港口水域内船舶通航密度大,船舶间距离近且机动频繁。这些会导致雷达难以稳定跟踪目标,降低目标数据精度。
(一)雷达的目标分辨能力有限制
根据IMO雷达设备性能标准MSC.192(79)的规定,在平静的海面使用1.5海里或更小的量程,在量程的50%~100%范围内,两个点物标的距离分辨力应不低于40米,方位分辨力应不低于2.5度[1]。当目标间距离小于40米或方位差小于2.5度时,雷达可能无法分辨目标,也无法稳定跟踪目标。这种超出雷达分辨能力的情况,在通航密度大的港口水域较为常见。
图1是上海港南槽航道进口高峰时拍摄的雷达图像。图中出现了严重的回波粘连现象。其原因就是船舶密度过大,目标间距离太近,超出了雷达的目标分辨能力。雷达无法分辨这些粘连在一起的目标回波,也无法准确捕获并稳定跟踪这些目标。对那些尚可分辨的目标,即使雷达能够捕获,在跟踪的过程中也极易发生目标丢失或交换,难以获取目标的准确运动数据。

图1 上海港进口高峰雷达图像
(二)雷达跟踪处理目标信息存在延时
雷达捕获目标后,需要对目标信息进行滤波处理,才能稳定地跟踪目标。在滤波过程中,雷达需要累积目标的过往数据,滤除各种传感器误差,平滑目标及本船的运动和气象海况等的不利影响[2]。在完成这些过程后,雷达才能预测目标未来的航向和航速,计算并输出目标的运动数据。从滤波的过程可以看出,雷达捕获目标后要延迟一段时间才能输出目标的运动数据。当目标发生机动航行时,由于滤波过程的耗时,导致雷达不能及时反馈目标的机动变化,对目标运动的预测存在延时。滤波过程造成了雷达对目标机动处理的延时,因而影响了雷达对近距离、高机动目标的跟踪精度[2]。
图2中的3号目标(箭头位置)是在上海港北槽航道作业的测量船,在作业过程中多次穿越航道,其机动尤为频繁。图2是在其掉头时所拍摄。通过图中3号目标的真尾迹,可以看出测量船已经完成了掉头,并开始向东北方向航行,但其真矢量却依然指向西南方向,存在明显错误。在面对高机动的目标时,雷达提供的目标运动数据并不可靠,甚至会给出错误的数据。

图2 机动目标雷达图像
三、港口水域内雷达图像的调节
由于海上开阔水域的航行环境和港口水域存在较大区别,船舶从海上进入港口水域时,雷达回波组成变得更为复杂。简单地减小雷达量程,直接沿用海上的图像调节参数,难以发挥雷达应有性能。
(一)雷达图像应随航行环境的变化而不断优化
在港口水域,雷达回波的组成要比海上开阔水域更为复杂。除了海上常见的海浪杂波、雨雪杂波外,还有多种假回波。这主要是因为,在港口水域目标距离近,岸吊、高楼等强反射目标多,使得雷达波反射更为强烈,易形成多种假回波和杂波。使用雷达时,应选择合适的量程和脉冲宽度,有针对性地调节增益和杂波抑制控钮,使雷达图像与航行环境时刻保持匹配。
以船舶在上海港北槽航道进口航行为例,到达横沙岛以前,船舶密度通常不大,但航道两侧水域常有小渔船活动,这时应优先考虑雷达对弱小目标的探测,应适当加大增益并选择宽脉冲。到达横沙岛后,船舶密度开始变大,强反射目标增多,小渔船数量有所减少,这时应优先考虑雷达的探测精度和目标分辨力,可选择窄脉冲并适当减小增益。
(二)注意调节雷达图像时各参数之间的矛盾
在调节雷达图像时,有些参数之间往往是互相矛盾的。比如,为了提高雷达对弱小目标的探测能力,需加大增益,选择更大的脉冲宽度,但这可能导致其他目标回波失真,杂波增强,雷达探测精度和目标分辨力降低。为了应对港口水域船舶密度高、强反射源多的航行环境,使用雷达时应减小增益,选择窄脉冲,以提高雷达的探测精度和目标分辨力,但这会降低雷达对弱小目标的探测能力。因此很难找到一组适合所有航行环境的调节参数。雷达图像调节的过程实际上是雷达各性能之间相互平衡的过程,不可能找到某一组参数使得雷达的各种性能都达到最佳状态。
四、港口水域使用雷达时的注意事项
(一)雷达不适合在港口水域避碰
1.雷达的CPA精度不能满足港口水域避碰要求
根据IMO雷达设备性能标准MSC192.(79)规定,在雷达对目标建立稳定跟踪后,CPA精度为±0.3海里[1]。在海上开阔水域,船舶间CPA通常控制在2海里左右,±0.3海里的CPA精度能够保证安全。在港口水域,船舶间CPA可能会减小到仅有几十米。例如在上海港的北槽航道、黄浦江这样的狭水道内,船舶间CPA很可能小于0.1海里,这样的CPA数据已经远远超出了雷达设备的性能标准,不能用于避碰。有资料认为当CPA控制到0.8海里仍不能满足航行需要时,雷达提供的信息就只能作为参考[2]。因此,在船舶密度较大的港口水域不能简单依据雷达数据采取避碰措施。
2.雷达解算目标运动数据耗时过长不满足港口水域避碰要求
在IMO雷达设备性能标准MSC192.(79)中规定,雷达应在3分钟内显示目标预测运动[1]。从雷达捕获目标,到解算出满足精度要求的目标运动数据,存在近3分钟的延时。使用雷达避碰时,通常应选择12海里量程[3]。这是考虑到了雷达避碰的原理和相关性能限制的合理做法。但在港口水域内,雷达多使用3海里或1.5海里甚至更小的量程(黄浦江内多使用0.75海里量程)。面对距离如此近的目标,3分钟的等待时间过长,会引发更多的碰撞风险。有资料显示,全世界每年因雷达延时造成碰撞的船舶达数百艘之多[4]。
在复杂的航行环境中,雷达可能无法分辨目标,出现目标丢失、目标交换、处理延时等问题,也可能出现因目标数据超出雷达性能标准,导致目标数据不可信、雷达频繁报警等问题。这些因素使得雷达在港口水域不能用于避碰。
(二)在港口水域使用雷达时不适合使用对水速度
在港口水域航行时,雷达目标种类和数量都远多于海上,既有浮标、抛锚船等静止目标,更有大量航行船舶这类运动目标。驾引人员在面对大量雷达目标时,不可能将注意力平均分配给每个目标。因此,如何在大量目标中快速准确地找出危险目标,对港内安全航行有着重要意义。雷达的真尾迹功能可以起到快速区分目标的作用[4],但要有效使用该功能,还需正确选择本船的速度。
图3、图4是上海港江亚锚地出口航行时拍摄的雷达图像。图3中本船速度选择的是对水模式。该模式下,抛锚船、浮标等静止目标以与风流压差相反的方向和速度移动,其显示的对水真尾迹和运动目标的对水真尾迹很相似,难以通过雷达快速区分并找出危险目标。本船的对水真矢量也不能直观准确地反映本船风、流压差的大小,不利于监控船位和避让固定目标,特别是在水流复杂的水域会产生更多的航行风险。图4中本船速度选择的是对地模式。该模式下,驾引人员通过雷达能快速分辨出哪些是应该重点关注的目标,可以时刻掌握本船的风、流压差,有利于港口水域的安全航行。
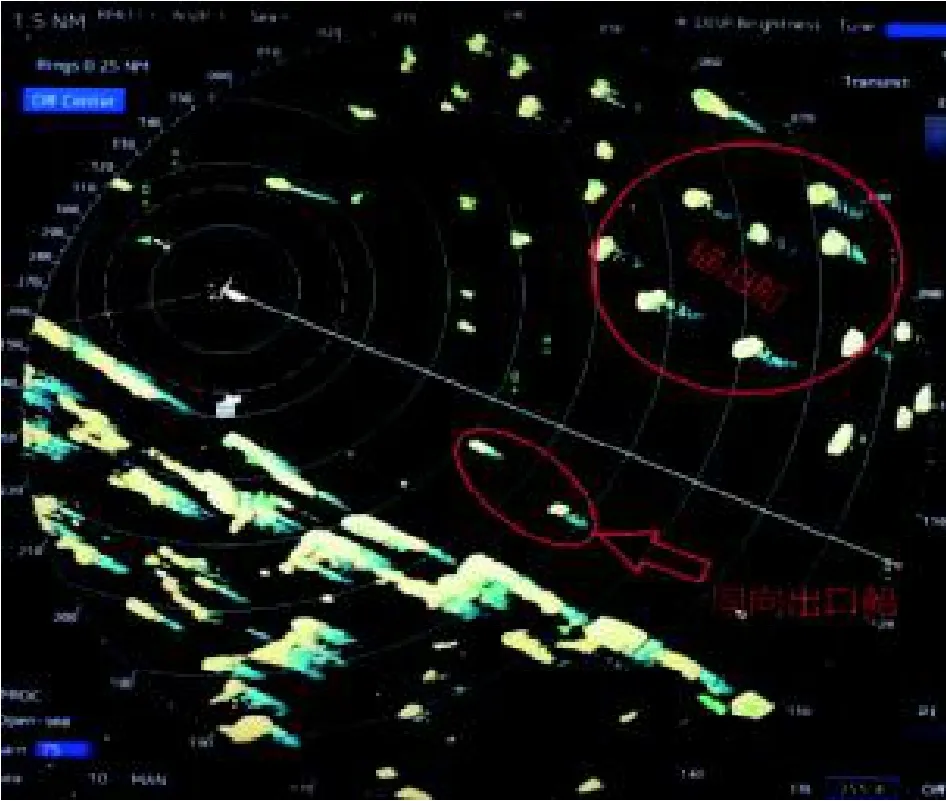
图3 对水真运动模式雷达图像

图4 对地真运动模式雷达图像
在实际工作中,常遇到有些船舶为满足避碰要求,进入港口水域后仍坚持选择对水速度(如图5所示)。这可能与船公司体系文件的规定有关。有些公司为了规避可能产生的法律风险,在体系文件中明确要求船长或驾驶员,在港口水域使用雷达时选择对水速度。面对港口水域复杂的航行环境,这种为了规避法律风险,不考虑具体环境的做法是不明智的,也可能是危险的。船公司在制定相关体系文件时应该更为细致,最好将港口水域和海上开阔水域区分开来,分别制定相应体系文件。

图5 某船雷达使用规则
(三)谨慎使用雷达的自动杂波控制功能
雷达自动杂波抑制主要有自动海浪杂波抑制(AUTO-SEA)、自动雨雪抑制(AUTO-RAIN)、自动抗杂波(CFAR)等。自动杂波抑制功能通常只适合回波组成比较简单的水域[2]。在港口水域,雷达回波组成复杂,包含多种类型目标回波及杂波。自动杂波抑制无法等效处理这些复杂多样的回波,可能导致弱小目标回波被当成杂波抑制。特别是当本船雷达处于不稳定显示模式下,本船首向的变化会引起目标回波的不稳定,弱小目标的回波更容易被抑制。因而,在使用自动杂波抑制功能时,要更为谨慎地对待弱小目标,同时要避免在不稳定显示模式下使用自动杂波抑制功能。
五、结束语
驾引人员在使用雷达时,应充分考虑本船周围的航行环境和雷达设备的性能限制。尤其是进入港口水域时,要注意复杂的航行环境会对雷达设备带来诸多不利影响,甚至导致雷达的部分功能不适用。不应强调在港口水域内使用雷达的避碰功能,而应合理使用雷达的定位、导航、瞭望、观测等其他有助于航行安全的功能。同时,为了更好地使用雷达,应该选择合适的显示模式和速度,并对雷达图像进行适当的调节。沿用在海上开阔水域的雷达设置,可能无法发挥雷达设备的应有性能,并带来额外的航行风险。
