腹腔镜手术机器人技术发展综述
2020-07-09闫志远梁云雷杜志江
闫志远 梁云雷 杜志江
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨,150080)
0 引言
腹腔镜手术机器人是医疗机器人领域的典型代表,是全球商业化最成功的手术机器人。其具有微创、精细、灵活、滤抖等显著优势,可以极大地扩展外科医生的手术能力,有效解决传统手术所面临的各种问题。目前外科手术正从开放式手术经由普通微创手术向机器人辅助微创手术的方向发展,机器人辅助微创外科手术是临床的刚性需求,发展趋势显著,成为未来外科手术发展的必然趋势。
微创手术是利用人体天生管腔或手术小孔来导入细长的医疗器械,并通过专用摄像头帮助医生操作医疗器械以处理解剖组织及病灶的技术[1],具有创伤小、减轻患者痛苦、术后恢复快、利于提高手术质量等优点[2]。不同于传统的开放式手术——医生需要在患者身体上切开较大切口来处理病灶,造成患者治疗过程较为痛苦——微创手术只需要若干个10mm左右小切口即可完成治疗。1987年,法国里昂医生Mouret成功为患者实施世界第一例腹腔镜胆囊切除手术[3],自此,微创手术技术正式进入飞速发展的时代,逐渐成熟并被广泛应用。
相比传统外科手术,微创手术虽然有诸多好处,但也存在医生手眼协调性较差、无法精细分离与缝合等缺陷[4]。例如,手术器械在患者开孔处产生的杠杆运动导致医生操作不灵活,而且手部的抖动也会造成器械末端动作不准确,医生不能直观观察病灶动态,长时间操作手术器械易产生疲劳等等。随着机器人技术的发展,医疗机器人技术逐渐融入到微创手术当中,其凭借操作精准、灵活性强等优点,成功解决了传统微创手术的弊端,成为当前医学、机械、图像学、力学等领域的研究热点。
本文详细介绍国内外腹腔镜手术机器人的主要研究成果,并对腹腔镜手术机器人的结构设计、运动路径规划、医学三维立体图像等技术进行分析,最后讨论其未来发展方向。
1 国内外研究现状
近年来,随着机器人技术的不断发展,世界各国广泛开展医疗机器人的研究,目前已有多家研究院所和公司推出了产品样机,并进行相应的动物试验及临床试验,其中部分研究成果已成功投入市场应用,实现商业化。
1.1 国外研究现状
1.1.1 AESOP系列微创手术机器人
1994年,美国Computer Motion公司研制出著名的微创手术机器人系统AESOP(见图1),成为全球首个获得FDA(美国食品药品监督管理局)注册的微创手术机器人系统[5-6]。
AESOP主要通过一条具有7个自由度的机械手臂来代替医护人员控制内窥镜,辅助医生完成手术,并有效解决了人手抖动所造成腔内图像不稳的问题,降低了手术中医护人员的工作强度。同时,AESOP可依靠语音指令实现医生对机械臂的控制,并随着语音识别技术的发展,其自身语音识别功能被不断完善。该公司分别于1996年和1998年研发出AESOP 2000[7]和AESOP 3000[8]手术机器人。优化后的AESOP机器人不仅提高了语音识别的准确性,还提高了微创手术操作的灵活性和安全性。
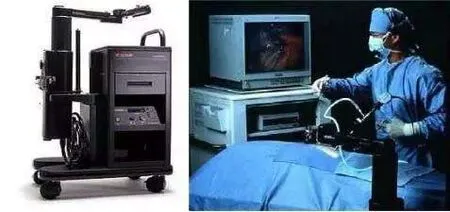
图1 AESOP微创手术机器人系统
1.1.2 ZEUS腹腔镜手术机器人
1998年,Computer Motion公司根据AESOP系列机器人的研发经验,成功研制出新一代腹腔镜手术机器人系统ZEUS(见图2)。ZEUS是第一代真正实现主从遥操作的手术机器人系统[9]。
ZEUS主要包括两部分:医生操作控制台和机械臂执行系统。机械臂执行系统包括2条7个自由度的器械臂、1条持镜臂和一个手术床,3条机器臂均集成在手术床上;医生操作控制台包括两个主手和若干脚踏开关,医生通过操控两个主手和脚踏开关来控制手术床上的3条机械臂进行微创手术[10-11]。
ZEUS通过多例动物试验和人体胆囊切除试验证明了主从遥操作手术的可行性,其中最为著名的“林白手术”就是运用该系统顺利完成的[12]。该系统的优点是:不仅消除了内窥镜抖动问题,还解决了医生手术时的手部抖动问题,使微创手术操作更加精准,有效降低了医生的疲劳度。

图2 ZEUS腹腔镜手术机器人系统
1.1.3 Da Vinci外科手术机器人
2001年,美国Intuitive Surgical公司研制出Da Vinci(达芬奇)外科手术机器人系统(见图3),并获得FDA认证[13]。
Da Vinci系统也采用主从遥操作模式来控制机械臂运动,主要包括医生控制台、床旁机械臂系统及手术器械、腔镜图像系统。不同于ZEUS机器人的机械臂与手术床一体的模式,Da Vinci的机械臂安装在移动平台上,该移动平台与手术床分离,并且装有可移动轮子,医生可根据不同手术空间安排其停靠在手术床旁边,从而增大机器臂的工作空间。
该床旁机械臂系统包含3条器械臂和1条持镜臂,每条机械臂都具有7个自由度,其中4个被动自由度用于术前摆位,3个主动自由度用于手术操作。医生控制台集成主操作手、控制脚踏和三维立体视觉腔镜显示系统,医生可通过控制脚踏开关与主操作手实现对机械臂的控制,进而完成手术[14]。

图3 Da Vinci外科手术机器人系统
Da Vinci是目前世界上最为成功的临床外科手术机器人系统,可为医生提供与传统开放式手术同样的直观术野和手术操作范围,同时具备滤除医生手部抖动、降低医生疲劳度的能力。截至目前,该系统在全球范围内已完成超过200万例手术,而最新一代Da Vinci Xi系统则进一步优化了Da Vinci的核心功能,提升了机械臂的灵活性,可覆盖更广的手术部位。
1.1.4 RAVEN外科手术机器人
美国华盛顿大学开发的新一代小型微创外科手术机器人系统为RAVEN(见图4)[15],该系统同样采用主从遥操作控制方式,由2条手术器械臂和1条持镜臂组成,每条器械臂具有7个自由度,分别包括5个旋转关节、1个移动关节和1个夹持关节。与Da Vinci外科手术机器人相比,RAVEN具有体积小巧、重量轻等优点。
在上一代RAVEN的基础上,该研发团队于近年又推出了RAVEN-Ⅱ手术机器人。该机器人基于开源Linux系统软件开发,最多可同时支持4条机械臂协同操作。
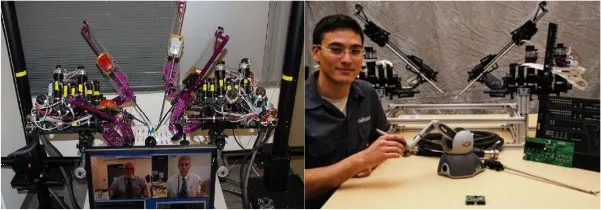
图4 RAVEN微创手术机器人
1.1.5 Robin Heart系列微创外科手术机器人
波兰罗兹理工大学在“波兰心脏外科机器人项目”的支持下,相继开发出类似Da Vinci系统的微创外科手术机器人系统,包括Robin Heart 0、Robin Heart 1、Robin Heart 3[16]。该系列机器人操作臂较Da Vinci系统简单,但灵活性和可操作性存在一定差距。

图5 Robin Heart 3机器人手术场景
1.1.6 MiroSurge微创手术机器人
德国宇航中心利用其在轻型臂研究方面的优势,开发出一款轻型臂微创手术机器人系统MiroSurge[17](见图6)。该手术机器人采用类似ZEUS系统的结构类型,将2条器械臂和一条持镜臂均安装在手术床上,便于实现多机械臂的空间位姿标定;机械臂依然采用主从控制方式,在机械臂关节处装有力传感器,能够实时检测关节处的力矩信息,便于实现机械臂的柔顺控制及术前摆位规划。

图6 德国轻型臂微创手术机器人
1.1.7 Revo-i腹腔镜手术机器人
2017年,韩国Meere公司发布一款类似Da Vinci的腹腔镜手术机器人Revo-i(见图7),并获得韩国医疗主管部门 MFDS(Korea’s Ministry of Food and Drug Safety) 批准上市。
REVO-i与Da Vinci极为相近,但手术器械直径比Da Vinci略小一些,主控制台采用带有双目镜筒的封闭式布置方式,从端执行机构由3条夹持手术器械的机械臂以及1条装有内窥镜的机械臂构成。

图7 Revo-i腹腔镜手术机器人系统
1.1.8 Hugo RAS手术机器人
模块化机械臂组合是近年腹腔镜手术机器人研发的重点方向。2019年9月,美国美敦力公司宣布其新一代手术机器人系统Hugo RAS(见图8)研发成功,该系统包括手术塔、控制台、手术臂和机械手推车,最大特点是其为一个模块化系统,即有多个独立组件,可以适应特定患者或医院病床的需求,并且可以随着技术的发展而升级。Hugo RAS另一特点是配有4个装在推车上的手术臂,这让其具有极大的灵活性。

图8 Hugo RAS手术机器人
1.1.9 Versius手术机器人
2019年3月,英国CMR Surgical公司研发的Versius系统(见图9)获得欧盟CE认证。其机械臂具有9个自由度,包含3个器械姿态自由度,另外6个自由度可通过不动点完成对末端位置的控制。

图9 Versius手术机器人
1.1.10 Senhance微创手术机器人
2018年10月,美国医疗设备厂商TransEnterix宣布旗下微创手术机器人系统Senhance(见图10)获得欧盟CE认证。该机器人系统已于2017年10月获得美国FDA认证。

图10 Senhance手术机器人
Senhance系统内置的光学传感器可辅助外科医生移动摄像头(通过一副眼镜和匹配的三维监控能力实现),并通过医生眼球运动来选择指令(相机系统能跟随医生眼睛的移动而移动聚焦视野),同时提供触觉反馈,从而在手术过程中根据仪器的压力和张力而带来触觉和感觉,极大方便医生观察手术视野过程的灵活性和敏捷性。
1.1.11 Avatera腹腔镜微创手术机器人
德国Avatera Medical公司将3D视野与AR技术相结合,研发出腹腔镜微创手术机器人系统Avatera(见图11),该机器人系统于2019年获得欧盟CE认证。
Avatera系统主控制台采用双目镜筒型结构布置方式,从端执行机构由固定在移动台车上的4条轻质串联机械臂构成,手术系统采用德国图宾根科技公司基于RADIUS技术研制的直径为5mm的非手腕型器械。
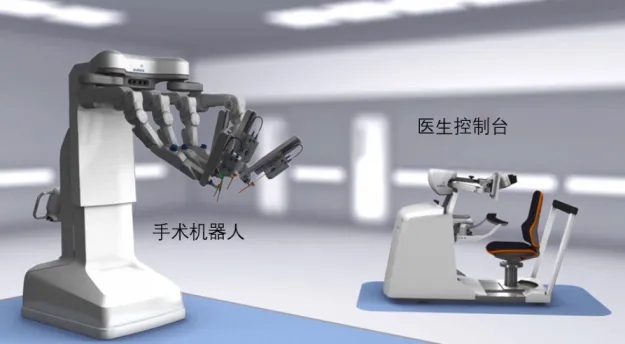
图11 Avatera手术机器人
1.2 国内研究现状
在腹腔镜手术机器人研究方面,我国虽然起步较晚,但在众多高校、研究院所和公司的共同努力下,也取得了一定的研究成果。
1.2.1 “妙手S”腹腔微创手术机器人
2005年,天津大学、南开大学与天津医科大学总医院联合研制出“妙手S”腹腔微创手术机器人(见图12)。该机器人依然采用主从控制方式,主从控制具有可调节比例功能,可以完成直径1mm以下的微细血管的剥离、剪切、缝合和打结等手术操作[18-19]。

图12 “妙手S”腹腔微创手术机器人
“妙手S”机器人包括主操作手、机械臂系统、图像处理系统和手术器械。其中,主操作手采用美国SensAble公司研发的Phantom Desktop(串联力反馈设备),具有三维力反馈功能,并可通过自身机械结构实现重力平衡。
1.2.2 哈工大微创手术机器人
2007年,哈尔滨工业大学机器人研究所联合南开大学、中国人民解放军总医院,研制出腹腔镜手术机器人系统[20](见图13)。该系统包括医生控制台、手术辅助系统及手术执行机构,其中手术执行机构包括机械臂系统及手术微器械;医生控制台与Da Vinci系统控制台相似,包含主操作手、高清三维立体视觉显示系统、脚踏及功能控制面板;手术辅助系统主要包括3D成像设备、能量仪器、气腹机等。
经试验证明,该系统能够实现抓取、缝合及打结等手术操作,具有较好的灵活性且操作空间范围较大,三维视觉可将患者腔内影像放大10倍以上,突破了人眼的观察极限,极大提高了手术的安全性和可靠性。

图13 哈工大微创手术机器人
1.2.3 苏州康多腹腔镜手术机器人
苏州康多机器人有限公司研制成功多款腹腔镜手术机器人,这些产品具有微创、精细、灵活、滤抖等显著优势,采用开放式观察的模式,机械臂系统摆位灵活,可以极大地扩展外科医生的手术能力,有效解决传统手术所面临的各种问题,这些机器人产品目前处于临床试验阶段。
此外,该公司研究团队率先在国内进行了5G远程手术研究,自2018年12月陆续开展了几次5G远程机器人手术动物实验。实验显示,术中机器人高清3D影像及声音传输即时、稳定,床旁机械臂操作平顺、灵活,主从跟踪性好,无误操作产生,主从映射模型正确;移动执行器末端运动指令到机器人臂末端运动平均延误时间小于150ms,为实现更复杂的外科手术创造了可行性。

图14 苏州康多腹腔镜手术机器人
1.2.4 上海图迈腹腔镜手术机器人
2014年,上海微创医疗器械(集团)有限公司研发了一款腹腔镜手术机器人,该产品被命名为“图迈内窥镜手术系统”,其由患者手术平台、图像台车、医生控制台3部分组成,可用于辅助完成腹腔镜微创外科手术,特别是针对以开放术式或常规腹腔镜术式完成较为困难的高难度复杂手术。

图15 图迈腹腔镜手术机器人
此外,国内近年涌现出多家腹腔镜手术机器人研发团队,如北京术锐技术有限公司、重庆博恩思医学机器人有限公司、重庆金山科技有限公司、杭州术创机器人有限公司等,另如深圳市精锋医疗科技有限公司、淄博科智星机器人有限公司等也在开展相关技术的研究工作。
2 关键技术分析
微创手术机器人系统的研究涉及医学、机器人学、计算机技术等众多学科领域,具体包括机器人结构设计、机械臂运动轨迹规划、医学三维图像建模技术和虚拟手术系统仿真技术等方面。
2.1 结构设计
手术机器人的结构设计是医疗机器人的关键技术之一,不仅要满足微创手术的手术特点,还要保障患者术中安全。目前主流的商用手术机器人采用的是主从控制方式,包括机械臂系统和控制台两部分,其中机械臂系统主要采用远心点运动机构、插入点处机器人主动控制和被动式关节结构3种方式实现机器人的定点运动;控制台主要采用串联结构,以及具有7个自由度的主操作手结构来实现从臂的灵活控制。
远心点运动机构是整个腹腔镜手术机器人系统的核心机构,可实现术中微器械绕患者腹壁创口的远心点运动,主要包括被动机构、冗余自由度机构、圆弧导轨机构、球面机构及复合平行四边形机构。在这几种典型的远心点结构中,被动机构和冗余自由度机构在实现时需要较为复杂的控制算法;圆弧导轨机构及球面机构对加工精度的要求较高,且占用较大的术中空间;复合平行四边形机构由多个平行四边形机构组装而成,对杆件的加工及装配精度要求较高。
目前,常用于微创手术机器人臂系统的远心点机构主要有球面运动机构、圆弧导轨机构及复合平行四边形机构。此外,许多研究人员对这几种机构进行优化后加以应用,如在球面机构的基础上研制出双连杆支撑的球面机构[21]。
截至目前,虽然微创手术机器人已被广泛应用,但仍然存在体积庞大,操作复杂等弊端,远心点机构的实现方式是腹腔镜外科手术机器人设计的关键,如何在保证良好的实用性的基础上,设计出体积更小巧轻便,操控更灵活的腹腔镜手术机器人系统是未来发展方向之一。
2.2 运动控制
目前,主流手术机器人采用主从异构的模式进行手术操作,为保证手术安全、提高手术效率,事先需要对机器人进行运动轨迹规划。机器人主操作手与机械臂运动学模型的差异导致主从运动空间不一致,这种典型的异构系统不能在关节空间内实现主从的运动映射,需要在笛卡尔空间内对其进行运动轨迹规划[22]来实现主从跟随性,保证主从位姿的一致性。笛卡尔空间轨迹规划较为直观,易于理解,但是涉及大量的笛卡尔空间和关节空间的转换,导致计算量较大,实施控制性能相对较弱。
此外,机器人主从轨迹跟踪是基于主手的绝对位置进行的,然而由于主手和器械末端工作空间的大小不同,医生为了获取舒适的操作空间,需频繁切换主手的位置,这种切换所带来的器械末端剧烈的跟随运动可能会引起严重的手术事故。因此,在微创手术中,在保持手术操作灵活、精准、安全的前提下,如何提高机器人主从轨迹跟踪的实时性及跟随性是未来研究的关键技术之一。
3 未来展望
从传统开放性手术到微创外科手术,再到如今商用化的腹腔镜手术机器人,医疗手术方式始终在不断演变进化中,手术机器人凭借准确性、可靠性、精确性等优势得到广泛应用。未来,腹腔镜手术机器人将会设计得更加小巧,具有更高的安全性、稳定性和更优异的操作性能,以满足更多复杂环境下手术的需求。
随着计算机技术和医学成像技术的发展,手术机器人可以利用图像信息为医生进行手术导航和定位,并为手术方案的制定提供直观的信息,有利于医生实时掌握主从控制映射的状态,实现机器人在手术中的定位导航功能。另外,虚拟现实(VR)和增强现实(AR)技术发展迅速,而且与手术机器人导航、培训等方面的结合日益紧密,成为重要交叉研究方向之一。因此,腹腔镜手术机器人系统与AI(人工智能)、VR、AR等高技术模块相结合,必会为手术机器人技术带来更大的发展。
