行业动态(新技术)
2020-07-09
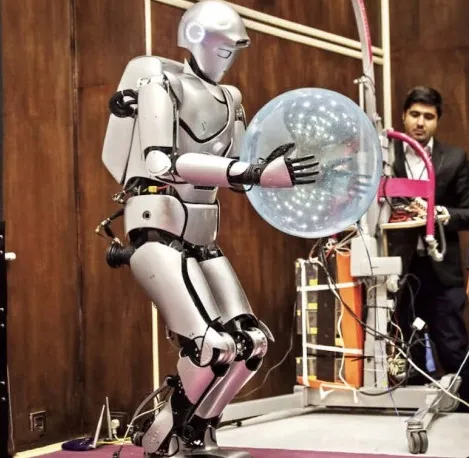
伊朗大学推出第四代人形机器人Surena IV
2月13日,伊朗德黑兰大学先进系统和技术中心(CAST)推出人形机器人Surena IV。
据了解,Surena IV高1.7m,重68kg,是在人形机器人Surena的基础上迭代的第四代产品。机器人全身共有43个自由度,行走起来非常灵活,脚底有一个定制的力量传感器,通过调整每只脚的角度和位置,机器人可以在凹凸不平的路面上自由行走,也可以上下楼梯,甚至还可以踢足球;能将录入的文字转换成语音播放;可以精确地跟踪物体,拥有一双灵巧的双手,可以完成握手、写字等动作,同时还能拿起水瓶,以及操纵各种物体,如电动工具;步行速度有很大提升,从第一代的0.3km/h提高到目前的0.7km/h。
自2008年第一代人形机器人Surena问世以来,Surena经历了从最初仅有8个自由度、只能用轮子移动的初代产品,到具有行走能力的Surena II,再到有31个自由度、能够踢球的Surena III。研发人员表示,Surena IV的运动能力和交互能力都达到了目前世界上的顶级水平。
研发人员表示,Surena IV虽然不能像波士顿动力公司研制的人形机器人Atlas一样完成体操和旋转跳跃等动作,但它的平衡能力也很强,可以依靠全身的运动控制器不断地调整姿势,避免自己跌倒。
(来源:德黑兰大学)
美国大学发明会“流汗”的软体机器人
日前,美国康奈尔大学的研究团队设计出一种可以通过“排汗”实现降温的软体机械抓手。该研究成果已发表在英文杂志《Science Robotics》上 。
据悉,该机械抓手上安装有5根可以同步弯曲、对物体抓握的“手指”,这些手指由水凝胶3D打印制成,储存了大量的水。手指的衬底中有通道,允许液体流动,其表层还含有一些小孔。当气温较低时,手指气孔关闭;当气温达到30℃时,表层水凝胶开始膨胀,其气孔也随之扩张,实现“排汗”降温。该降温效率为107W/kg,比哺乳动物的降温效率高。
研究人员表示,该项技术可以帮助长时间工作的机器人散热,避免因过热引发的各种故障。
(来源:科技日报)

日本公司升级人工智能芯片
2月11日,日本软银集团旗下的Arm公司正式发布一款人工智能芯片——Cortex-M55。
据悉,Cortex-M55是一款基于 Arm v8.1-M 架构、内建 Arm Helium 向量技术的处理器,具有执行SIMD指令的能力。与前几代Cortex-M系列处理器相比,Cortex-M55的数字信号处理能力提升了5倍多,机器学习的性能最高可提升15倍。
此外,Arm还发布了一款微神经处理器单元Ethos-U55,其采用了压缩技术,可以节省电力、缩小机器学习模型的尺寸,同时还能提升体积受限的嵌入式与物联网设备的机器学习推理能力。
Ethos-U55具有高度的可配置性,其搭配Cortex-M55可以提供手势识别、生物特征识别、语音识别等机器学习能力,大幅提升终端设备的智能应用。终端设备搜集数据的同时,也具备机器学习模型推论能力,除了加快反应速度,也能降低对云端人工智能、网络的依赖。
Arm方面表示,这些芯片技术功耗很低,只要一块电池就能工作数年,并且只有在有需要时才会进行联网。减少网络链接有助于保护隐私,而且医疗保健等许多领域更多是在本地处理数据,很少或根本不需要将结果发送回远程服务器。
(来源:TechWeb)
中科院研发多功能微型软体机器人
近日,中国科学院深圳先进技术研究院研发出一款多功能微型软体机器人,其集多模态运动、可控变形、光学伪装、可视化感知环境等功能于一体,极大提升了软体机器人在复杂限域空间内运动与执行多重任务的能力。该研究成果已发表在材料领域英文权威期刊《先进功能材料》上。
据介绍,该软体机器人采用透明度高的温敏性水凝胶材料,研究团队通过模仿章鱼的结构和功能,创新性的将分段式结构设计与智能材料结合:将磁响应钕铁硼颗粒仅设计在该软体机器人的头部作为驱动单元;将反蛋白石多孔结构设计在其尾部作为功能单元。通过调控磁场的方向与频率,该软体机器人能够在水中进行爬行、滚动、摆动、螺旋性推进等多种形态的运动,而且能够精准地穿过2 mm高和450 μm宽的狭窄通道。
除了能实现多种运动外,该软体机器人还具有变形和变色的功能。研究发现,在遇到孔洞尺寸比机器人自身尺寸更小时,该机器人在光热作用下身体可以缩小至原身体尺寸的35%,从而穿过尺寸更小的狭窄空间。同时,当外界温度发生变化时,机器人可以通过自身颜色变化实时反映周围环境的变化。
研究人员表示,他们此前模仿含羞草、变色龙等生物研制的微型软体机器人功能相对单一,而此次研发的微型软体机器人功能多样化,有望应用在生物医学、环境监测等多个领域。
(来源:中国科学院深圳先进技术研究院)
美校企联合研发可自学走路的机器人
日前,美国谷歌公司、佐治亚理工学院、加州大学伯克利分校的研究人员共同研发出一款可以实现自学走路的四足机器人。
据悉,该机器人名为 Rainbow Dash,结合了深度学习和强化学习两种不同类型的人工智能技术,可直接放置于真实环境中进行训练。 研究表明,该机器人可以在坚硬平坦的地面、有记忆海绵材质的床垫、镂空的地毯上等,花费1到数小时,自己学会向前、向后以及左右转弯等运动。
研究人员表示,当Rainbow Dash不小心离开了原本要学习的地面环境,他们会对其进行干预。例如,他们创建了边界,以防止它离开该区域,机器人只能在该边界内学习走路,此外,研究人员还设计了特定的算法来防止机器人摔倒。
据悉,该研究仍处于早期阶段,下一步,该团队计划在各种各样的机器人上以及更多样化的环境中测试该学习系统。
(来源:界面新闻)

日本大学设计触觉传感器令机器人“感受”疼痛
近日,日本大阪大学研发人员设计出一套能识别一系列触碰的触觉传感器,当该传感器与机器人连接时,机器人会发出情绪信号。他们表示,未来科学家有望研制出拥有触觉并“感受”身体疼痛的机器人,这些机器人或许也能对人类的痛苦“感同身受”。
据悉,该触觉传感器名为“疼痛神经系统”,嵌入了柔软的人造皮肤,可感知轻柔的触摸和有痛感的击打。研发人员将该传感器与一套名为“Affetto”(模仿孩子头部的机器人)的机器人系统连接时,触觉和疼痛信号可以转化成表达情绪的面部表情。
研发人员表示,该系统有望催生能识别他人疼痛的机器人,而识别他人疼痛是用于照看老年人的机器人需要具备的一项重要技能,利用机器人触觉传感技术有望实现这一目标。
