远程手术机器人研究与关键技术分析
2020-07-09闫志远梁云雷杜志江
闫志远 梁云雷 杜志江
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨,150080)
0 引言
随着计算机技术和机器人技术的不断发展,医疗机器人开始走进大众的视野,并应用到医疗领域的各个方面,在很大程度上提高了人类的医疗技术水平。其中,手术机器人作为医疗机器人领域的重要组成成员,集成临床技术和高精尖机器人技术,成为医疗领域中最具潜力的产业分支和战略高地,以及全球机器人科学研究和商业应用的热点,市场前景广阔。
与传统人工手术相比,机器人辅助手术具有很多优势。首先,在手术过程中,机器人能在很大程度上消除医生手部颤动的问题,极大地提高手术操作精度,并且可以通过运动缩放功能帮助医生实现更加精细的手术操作;其次,由于机器人的参与,减轻了医生的工作强度,同时医生与机器人的相互配合,能在一定程度上减少患者创伤,提高手术质量。
远程医疗技术以向远程患者提供医疗服务、遥测医疗信息、传播医学知识为目标[1]。远程手术作为远程医疗的重要组成部分,可以有效改善医疗资源的偏态分布、节省医疗资源与费用,提高病人的救治率。远程手术是指医生与患者分别处于不同的地理位置,手术医生借助视频、音频、图像、力觉等临场感的装备与技术开展手术的过程[2],我们一般把患者所在位置称为患者端,手术医生所在位置称为医生端。理论上,机器人辅助手术极大缩小了医生与患者的距离限制,通过远程手术,大城市的医生能够很方便地为医疗条件较差的偏远地区患者提供手术指导。同时,在射线、地震灾害、战场等危险手术环境中,通过机器人的协助,医生不需要到现场便能对患者进行诊断,避免了医生身体受到伤害。此外,我国人口众多,幅员辽阔,医疗资源分布不均,不同地区的医疗水平存在着较大差异,机器人辅助远程手术能够很好地平衡不同地区的医疗水平差异,提高医疗资源的利用效率。比如,医生在手术室中通过操作主端机器人,可以控制远在千里之外的末端手术器械,从而对患者实施手术。
1 国内外研究现状
近年来,国内外高校及科研院所对远程手术机器人技术进行了广泛研究,并取得了一定成果。
1.1 国外研究现状
2000年,Micali等人首先报道了5例从美国巴尔的摩市到意大利罗马的机器人远程手术指导实验,其中4例获得成功;同年,Cheah等人完成了自新加坡到美国巴尔的摩市的远程腹腔镜胆囊切除术。
2001年,Marescaux等人完成了世界首例从美国纽约到法国斯特拉斯堡横跨大西洋的机器人远程胆囊切除术,即著名的“林白手术”[3-4],这是远程手术的一个里程碑,验证了远程手术技术的可行性 ,标志着外科手术跨时代的飞跃。
1.2 国内研究现状
国内一些科研机构也开展了远程机器人系统研究。2003年,海军总医院利用“黎元”手术机器人系统完成了我国首次脑外科异地手术[5]。2006年,北京积水潭医院利用自主研发的主从式机器人辅助胫骨髓内钉内固定手术系统进行远程骨科手术操作,结果证实了远程骨科机器人手术系统安全有效[6]。脑科手术和骨科手术相对于腹腔外科手术来说,重要的是影像导航和定位,不需要全程无间断的实时手术视频远程传输操作,对网络延时的要求不大,对数据传输要求也不高。
2012年12月,北京航空航天大学和海军总医院合作开发的BH-7机器人系统完成了我国首次海上远程手术。手术实施过程中,医生位于北京的海军总医院远程中心,患者位于太平洋某海域的医院船上,手术通过卫星通信建立通信连接,最后手术获得成功[7]。然而,卫星通信远远不能满足远程手术要求,其信号延迟的不确定性和数据丢包率等问题制约了远程手术的安全开展。
随着4G网络通信的发展,其网络状态远远高于卫星通信,推动了远程手术的发展。2015年,国产“妙手S”微创手术机器人借助10兆带宽商用网络,完成了约170km的远程无线动物实验,平均手术延时在250ms左右,两地之间控制信号单项网络时延最大为12.3ms,系统双向总延时最大为302.6ms,丢包率最大为4.10%[8-9]。虽然整个实验较为成功,但4G网络的窄带宽及网络高时延仍限制了远程手术的临床应用推广。
随着第5代移动通信技术的到来,医疗领域结合5G技术的优势开展了相应的探索与尝试。5G技术可为远程手术提供高速率、多连接、大带宽及低时延的网络环境,满足远程手术实时性、高效性及稳定性的需求。
2018年12月,中国人民解放军总医院第一医学中心与苏州康多机器人有限公司(以下简称康多机器人)合作,利用康多机器人公司自主研发的手术机器人在福州顺利完成5G远程手术动物实验。手术过程中,主刀医师远程控制2个机械臂和镜头臂(如图1所示),楔形切除约2cm×2cm×3cm大小的猪肝脏。术中高清3D影像及声音传输实时、稳定,机械臂操作灵活,主从跟随性及一致性好,移动执行器末端运动指令到机械臂末端平均时延小于150ms[10]。
2019年3月16日,中国人民解放军总医院完成了世界首例5G远程人体手术,位于三亚的解放军总医院海南医院的远程操控专家成功对北京的一名患者进行远程帕金森“脑起搏器”植入手术[11],手术跨越3000km,开启了5G远程手术的新篇章。
2019年9月,全军肝胆外科研究所与康多机器人公司合作,完成全球首例多点协同5G远程多学科机器人手术试验(如图2所示),两位手术医生分别在北京和苏州,通过远程操控机械臂对试验动物实施了胃肠切除和肝切除手术[12]。实验结果表明,手术期间通信时延小,手术操作准确有效,试验动物的生命体征平稳。此次多点协同远程手术打破了以往患者与医生单点会诊及手术的模式,可让多位不同领域的专家共同远程会诊并为患者实施手术,这为未来远程手术机器人协同操作手术奠定了技术基础,实现了临床医学、机器人学和通信工程交叉领域的重大创新。

图2 多点协同5G远程手术试验示意图
综上分析表明,我国越来越重视远程手术技术方面的研究工作,并且在远程人体手术和多点远程协同手术等方面均取得重大突破,但是在研制具有自主知识产权的远程手术机器人方面仍处于起步阶段,涉及到的多学科交叉领域等关键技术问题尚待进一步研究。
2 关键技术分析
本节主要从系统架构、信号传输机制、视频压缩处理机制、主从安全处理机制4方面对远程手术机器人的关键技术进行分析。
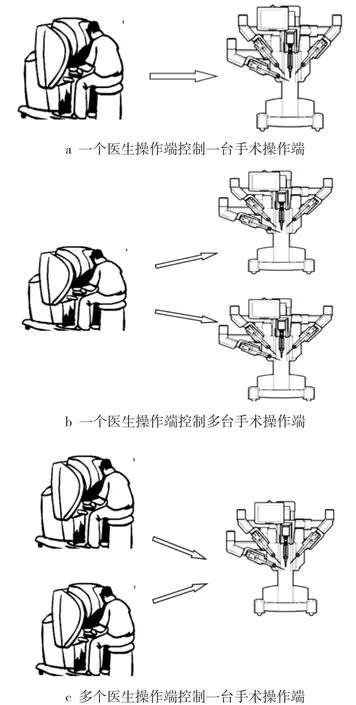
图3 机器人远程手术系统模型
2.1 系统架构
远程手术机器人系统的研发是远程手术的关键技术之一。不同于传统同一物理空间下的手术机器人,远程手术机器人需要将医生操作端及手术操作端放置于不同物理空间下,其模型可以分为3种,如图3a-3c所示。其中,图3a为一个医生操作端控制一台手术操作端,图3b为一个医生操作端同时控制多台手术操作端,图3c为多个医生操作端共同控制一台手术操作端进行远程手术。
目前,商用手术机器人主要在同一物理空间下使用,若要构建远程手术机器人系统,不仅要考虑其功能是否稳定,还要为其添加可靠的远程通信系统。其中,机器人系统包含远程手术机械臂、医生操作台、附属的腔镜系统和手术器械单元;远程通信系统主要为机器人主从两端的多模态信号的传输提供网络通道。远程手术机器人系统具体架构如图4所示。

图4 远程手术机器人系统架构
2.2 远程信号传输机制
在机器人远程手术中,医生不仅需要发送操作指令控制患者端的机械臂进行手术操作,还需不断确认患者端的反馈信息,以确保手术的安全进行,因此远程信号的传输需是具有较高实时性的双向传输机制。目前的远程通信系统传输硬件主要以上位机为主,针对较高实时性的需求,大多数传输机制采用基于UDP的机器人控制信息传输协议。但由于UDP传输协议的传输可靠性较低,因此研发一种实时性较高且可靠的传输机制是远程手术机器人未来发展的重要研究方向之一。
2.3 视频压缩处理机制
随着计算机及医学成像技术的发展,医生可通过3D腹腔镜图像获取更宽阔、更清晰的术野,使手术操作更简便、更安全,而医生如何获取分辨率较高的3D腹腔镜图像是机器人远程手术的关键技术之一。由于腹腔镜图像为3D高清图像,需要较高的带宽和网络实时性,因此在患者端需采用外置高速数据采集卡对图像进行采集和3D压缩处理,这能够有效节约系统处理及传输时间,降低图像传输时延;同时增加断点续传功能,可在图像中断后再连接时,从断点续传,确保术中图像的连续性。
此前,3D高清腹腔镜图像远程传输一直受网络带宽的限制,随着第5代移动通信技术的发展,如何在5G网络环境下稳定传输高清3D腹腔镜图像对于远程手术技术的发展尤为重要。
2.4 远程主从安全处理机制
在机器人远程手术中,医生与患者处于不同的物理环境,如何保障“医生—患者”之间的信息对接、操作对接、故障处理等主从安全处理机制,对保证远程手术的安全性和操作性尤为重要。主从安全处理机制主要受控于通信传输,若发生意外情况,其会立即停止双向信号传输,手术机器人也会立即切换至待机状态,保障远程手术的安全性;当通信再次连接时,其通过建立机器人主从二次运动学映射机制,实现机器人由待机状态切换到连接状态,手术机械臂及器械能够映射主操作端医生的控制信息,从而保证手术过程中远程控制信号的安全有效连接及映射。
3 展望
远程手术是指医生通过主操作手,以网络为媒介控制患者端手术机器人来完成手术,是一个集机器人学、通信、医学等众多学科为一体的交叉研究领域。当前,机器人远程手术还有几方面的非技术问题需要突破:
1)伦理问题。医疗机器人技术的发展始终伴随着该问题,远程手术的医学伦理问题尚待进一步研究。
2)责任主体。远程手术机器人存在主从两个操作端,医疗责任划分需要相关法规支持。
3)收费问题。远程手术技术费用很高,成本问题成为其具体实施的重大障碍。
随着通信技术的发展和医疗领域法律法规的不断健全,远程手术机器人技术必将实现稳步发展。界时,远程手术机器人系统的应用不仅仅局限于医院的手术室,针对海上、战场等复杂环境的应用也将成为其未来发展和重点研究方向之一,对我国战时医疗救援具有十分重要的意义。
4 总结
本文主要对近年国内外远程手术机器人的研究成果进行分析,并对其体系架构、远程信号传输机制、远程图像视频压缩处理机制及主从安全处理机制等关键技术进行分析,指出远程手术机器人的应用将有效解决我国目前医疗资源供需不平衡的矛盾,节省医疗资源,提高医疗救治率,而且对战时医疗救援具有十分重要的意义。
