骨科手术机器人技术发展综述
2020-07-09于洪健杜志江
于洪健 李 乾 杜志江
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨,150080)
0 引言
骨科手术是典型的硬组织操作手术,手术术式繁多、临床需求广泛。骨科手术机器人已经成为推动骨科手术个性化、精准化、微创化发展的核心装备与技术,其操作对象属于人体硬组织,在物理学中可视为刚体,因此骨科手术机器人也可称为“硬组织操作机器人”。
科学技术的发展与应用,极大的推动了现代骨科学与骨科手术技术的发展,如计算机图像处理技术与医学影像技术在临床骨科中的融合应用,促进了“计算机辅助骨科手术(Computer Assisted Orthopedic Surgery,CAOS)”的发展;其核心技术图像引导手术IGS(Image guided Surgery),通过X光或CT影像信息作为主要数据载体,结合空间定位导航技术对患部位置信息及手术工具位姿信息进行跟踪,可实现高精度术中导航。而机器人技术与图像引导技术的结合与应用,进一步推动了机器人辅助骨科手术(Robotic Assisted Orthopedic Surgery)的发展,机器人可以依据医学影像信息直接进行手术操作规划、定位及控制,实现辅助或自主手术操作。
骨科手术属于深部手术,内部结构复杂,操作对象为骨性刚体结构,故对操作精度要求高,而且手术术式多样、操作流程复杂、操作需求繁多。骨科手术机器人系统通常由影像系统、手术规划导航系统、机器臂操作系统三大部分组成,其中影像系统由X光机或CT等医学影像设备构成,可实现对手术部位空间位置信息的透视,并通过定位标靶实现坐标信息由图像坐标系到机器人坐标系的转换,为机器人系统操作提供基础位置信息,因此图像分辨率(精度)及质量、影像坐标转换精度,对机器人手术操作精度具有重要影响。
手术规划导航系统依据医学影像所提供的信息进行手术操作规划,这个过程可根据手术术式的不同由医生主导完成或机器人自主完成,也可依据手术规划信息引导机器人完成手术操作,目前在临床领域通常利用光学定位技术实现,导航系统精度可达0.05mm~0.5mm。
机械臂操作系统为机器人的控制与执行机构,可依据手术规划信息对机器人进行运动规划,实现运动控制,完成手术操作。在手术过程中,机器人依据导航信息跟踪末端工具状态并实现术中保护,因此导航系统是机器人空间定位的关键一环。
1 骨科手术机器人类型
骨科手术机器人操作对象与传统机器人操作对象的属性是一致的(同为刚体),这使得机器人技术在该领域的临床应用具有天然优势,因此骨科手术机器人也是最早实现临床应用的手术机器人之一。机器人进入骨科领域可追溯到20世纪80年代,其表现出良好的临床实用性,对提高手术精度、减小手术损伤、减轻医生强度具有重要意义。目前,国内外已有多家研究机构开发出骨科手术机器人原型系统,而且部分系统成功实现商业应用。
根据现有骨科手术分类方法,骨科手术机器人可分为关节骨科、创伤骨科与脊柱外科手术机器人。
1.1 关节骨科手术机器人
关节骨科手术机器人是最早实现技术和商业应用的骨科手术机器人,按照操作控制方式可分为主动操作型和主动约束型。
1986年,美国IBM Thomas J. Watson研究中心和加利福尼亚大学戴维斯分校联合开发出一种用于髋关节置换手术的精密系统;1992年,双方成立Integrated Surgical Systems公司,并以上述技术为基础研发出骨科手术机器人系统ROBODOC(如图1a),该系统成功实现临床应用,并于2008年获得美国食品药品监督管理局(FDA)许可。ROBODOC是主动操作型机器人的典型代表,以水平关节型串联机器人结构为基础,结合末端工具,可实现膝关节及髋关节置换手术操作;还可依据术前3D规划、术中导航,实现机器人自主手术操作,辅助骨骼成形、假体定位和置入。
1997年,德国Orto Maquet公司研发出CASPAR(Computer Assisted Surgical Planning and Robotics)机器人系统(如图1b),该系统采用工业机器人结构,并增加了前交叉韧带修复术术式,功能类似于ROBODOC,两者均为主动型操作机器人,可依据手术规划自主完成骨骼成形操作,但由于安全性、手术效率、准备时间等问题限制了该系统的推广与应用。
2001年,英国Acrobot公司的ACROBOT(Active Constraint Robot)机器人系统实现临床试验(如图1c),该系统技术由英国帝国理工大学于1992年开发。ACROBOT首次采用主动约束式控制方式(Surgeon-guided)来实现手术操作,机器人依据术前3D影像进行重建、分割及手术规划;术中基于配准技术实现定位,将术前规划信息映射到手术操作区域,并由机器人提供操作区域约束,再由医生拖拽实现骨骼成形操作。
2013年,全球骨科医疗科技公司巨头Stryker收购MAKO Surgical公司及其RIO(Robotic Arm Interactive Orthopedic)关节手术机器人系统(如图1d),该系统于2015年获得美国FDA许可。RIO机器人系统同样采用主动约束控制方式实现关节切除术,在机械臂设计中其更注重人机交互操作的柔顺性,机械臂具有6自由度,采用丝传动结构设计,通过各自由度的平衡设计,实现机器人的柔顺交互操作。
相比于主动操作型机器人,主动约束型手术机器人更好利用了机器人系统的优势,通过主动约束保障关节切除操作的边界控制,提高手术安全性,并且利用医生引导的拖拽操作,使整个手术过程连续、可控。因此,主动约束型手术机器人具有更好的临床可操作性、适应性及安全性。
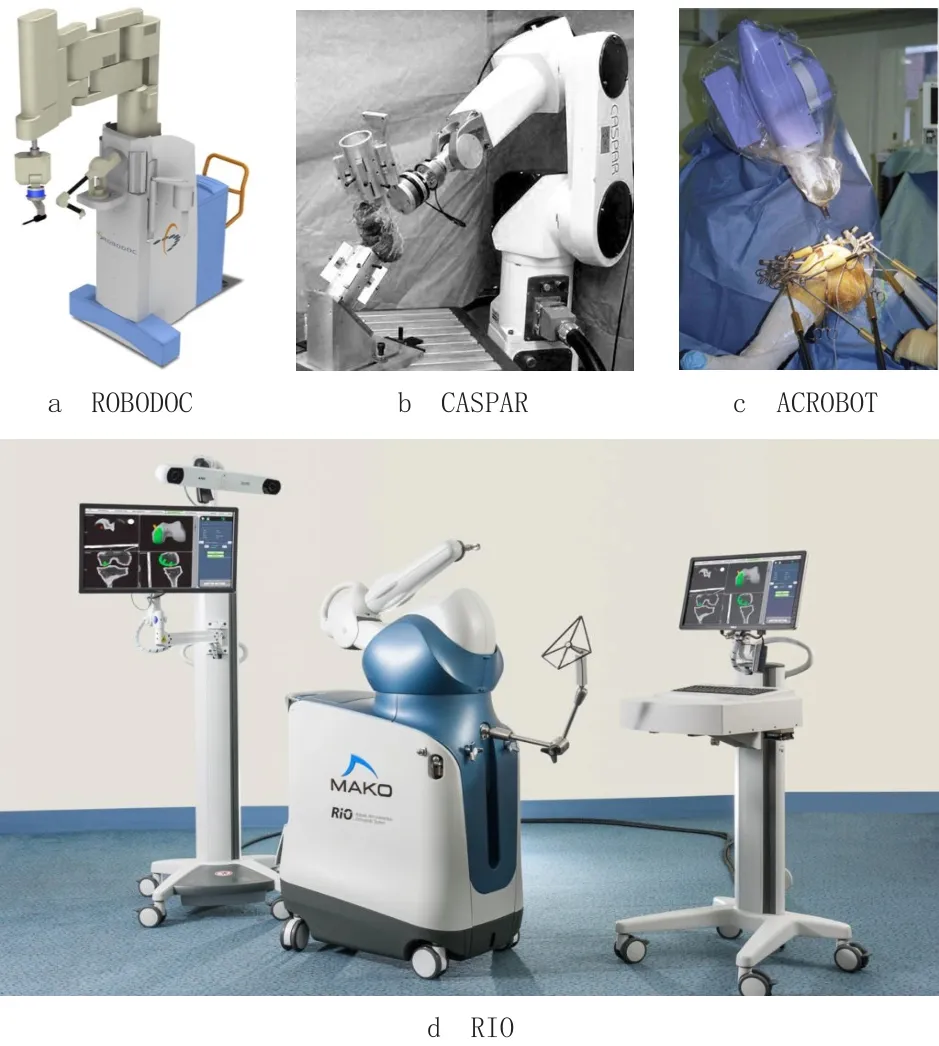
图1 关节骨科手术机器人系统
1.2 脊柱外科手术机器人
脊柱外科手术机器人目前主要针对的临床术式为椎弓根钉固定术,机器人借助医学影像规划实现空间精准定位,自主完成或导引医生完成植入通道钻制操作。脊柱手术机器人以实现精准、微创手术为首要目标,通过机器人精准定位可以减小患者手术过程中的开口大小,减少神经损伤风险,最大限度地实现手术操作的精准度和安全性。
最早实现临床应用的脊柱外科手术机器人是以色列Mazor Robotics的SpineAssist机器人系统,如图2a所示。该系统采用6自由度 Stewart并联机构构型,直径50mm,高80mm,重250g,重复定位精度0.01mm。轻量化、小型化的设计,使SpineAssist机器人在执行手术操作时可直接置于患者的脊柱上,免受椎体位置变动的影响,同时基于革命性的“Hover-T桥”技术,使系统安装过程更便捷、适应性更强。2004年,SpineAssist通过美国FDA和欧盟CE认证,2011年升级为Renaissance系统(如图2b),可实现术中2D及3D导航。
2016年,美国美敦力(Medtronic)公司推出Mazor X Stealth机器人系统(如图2c),该系统购自以色列医疗设备公司Mazor Robotics。Mazor X Stealth采用串联机器人结构实现椎弓根钉植入导航操作,相比SpineAssist及Renaissance系统,其具有更高的系统刚度,手术操作注册及准备时间更短。
同样采用串联机器人结构的脊柱外科手术机器人还有美国Zimmer Biomet公司的ROSA机器人系统及Globus Medical 公司的ExcelsiusGPS机器人系统。
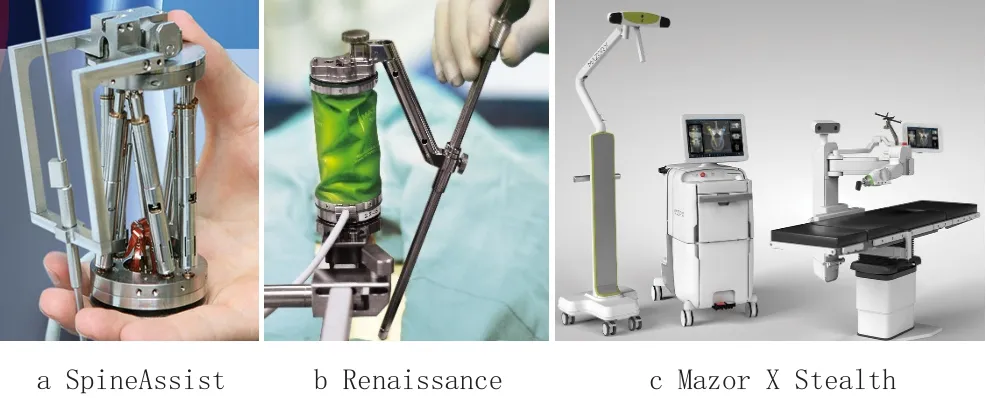
图2 脊柱外科手术机器人系统
国内脊柱外科手术机器人的研究起步稍晚,近年成为国内医疗机器人领域的研究热点,并取得了一定的成果。其中,最具代表性的机器人系统有:哈尔滨工业大学(以下简称哈工大)的脊柱手术机器人(如图3a)、积水潭医院及天智航公司联合开发的天玑脊柱手术机器人(如图3b);其余代表性研究机构包括中科院深圳先进技术研究院、北京航空航天大学(以下简称北航)等。

图3 国内脊柱外科手术机器人系统
1.3 创伤骨科手术机器人
创伤骨科手术机器人系统主要应用于长肢骨骨折复位手术,基于医学影像引导,实现对断骨的复位操作。其按照机器人构型可分为串联型和并联型两种,国外串联型机器人代表包括:德国汉诺威大学及日本东京大学研制的骨折复位手术机器人系统(如图4a、4b)。
德国汉诺威大学引入遥操作概念,通过力反馈手柄操作Staubli工业机器人,并结合光学导航系统和术中3D影像采集C型臂(一种便捷x光机)完成骨折的配准;日本东京大学研制的机器人辅助骨折复位系统FRAC-Robo,通过带有力反馈装置的6自由度串联机器人、足靴固定足部,牵引下肢完成股骨干骨折复位。
在国内,哈工大研制出用于骨干骨折复位的6-PTRT型并联机器人系统(如图4c),并通过人体模型骨和人体标本试验制定了临床复位手术方案;北航研制出用于股骨干骨折的复位双平面导航机器人系统(如图4d),并针对胫骨髓内钉手术、股骨髓内钉手术、骨盆骶髂关节螺钉手术和股骨颈空心钉手术,开展临床应用研究;中国人民解放军总医院(301医院)构建了基于Stewart平台的长骨骨折复位机器人系统(如图4e)和基于UR机械臂的通用定位机器人系统,这两种系统均采用基于视觉导航下点云配准的策略,已完成模型及标本试验。

图4 创伤骨科手术机器人系统
创伤骨科手术机器人是一种较早开展研究的手术机器人系统,然而由于骨折手术分型的多样性,造成手术需求复杂,使得现有机器人系统难以满足实际手术需求,因此创伤骨科机器人目前还没有实现临床应用与产品化推广。
2 关键技术
机器人辅助骨科手术系统作为一种新型的骨科手术方案,早在上个世纪就被提出,其使用计算机对系统状态和机器人运动进行控制、跟踪[1-2]。这种方法的目的是在手术视野和手术路径受限的情况下,可以高精度、高安全性地完成骨科手术。针对不同的手术术式,尽管骨科手术机器人系统使用的具体技术方法、手术流程和机器人控制方法不同,但这些系统的基本设计理念具有很高的相似性。如图5所示,在一般的机器人辅助骨科手术系统中,计算机虚拟对象、导航系统和病灶物理对象是3个必不可少的重要组成部分,而图像与规划技术、导航配准技术和目标跟踪技术则是手术过程中的几个关键技术。

图5 机器人辅助骨科手术系统组成及其关键技术
2.1 图像与规划技术
机器人辅助骨科手术系统相对于普通外科手术的一大优势是:医生可以在一个相对具象的计算机虚拟对象上进行手术规划,基于此,机器人可完成手术的部分或全部操作。上述多数的虚拟对象来自于医学图像数据,这些数据从时间上可分为术前和术中两种。几年前,大多数骨科手术机器人系统都使用术前CT图像生成三维虚拟对象,但也有一些使用核磁共振MRI图像的例子[3-4]。与MRI相比,CT图像可以更加清晰地对比骨组织和其他软组织,图像质量较高,但是对患者的辐射剂量较大。近来,研究者们普遍认识到术前图像的局限性:图像采集和实际手术之间的时间差会导致手术精度下降,因此关于术中图像的研究越来越多,包括术中二维图像和术中三维图像。
相较于CT图像,C型臂采集的二维透射图像具有更低的辐射剂量,基于这种虚拟透视图像的导航系统在很多创伤骨科手术中得到应用。但是由于其配准方法复杂,实际规划起来有很多问题,尤其在面向椎板减压术和关节置换术等磨削类手术时,更是无法直接在这种虚拟透视图像上进行规划。为解决这些问题,一种新型的术中三维成像设备被研制出来[5],该设备由一个电机和C型臂组成,可以在一定时间内连续采集50-100张二维透视图像,并从中重建出一个三维CT数据。该采集的数据可以有效解决上述问题,被认为是一种理想的虚拟对象。目前,这种设备已经在几种手术的导航系统中成功应用[6-7]。
在使用三维虚拟对象进行规划时,手术系统一般需要对所关心的组织、解剖结构进行图像分割处理和三维重建显示,以更加直观的形式展示病灶。随着计算机科学的发展,一些基于机器学习、深度学习的方法被提出,这些方法能从医学图像中分割出特定的组织或器官,例如,针对人工耳蜗植入手术,伯尔尼大学的研究团队从CT图像中分割出面神经,并在规划和手术中对危险区域进行规避[8]。
2.2 导航配准技术
导航系统是骨科手术机器人系统的核心部分,它是连接病灶物理对象和计算机虚拟对象的纽带,可将医生在计算机虚拟对象上的规划转换至病灶物理对象坐标系上,这个过程也被称作导航配准。在不同的骨科手术机器人系统中,由于手术方式不同、设备不同,配准方法也不相同[9]。
最简单的配准方法是由医生在虚拟对象上选择一些解剖标志点,并通过跟踪仪的探头拾取病灶物理对象上的对应点,计算机凭借此计算出两者之间的转换关系[10]。虽然这种方法的数学求解较为简单,但是由于医生在两个对象上拾取点的一致性不高,可能导致配准结果的准确度较低。如果把一些人造标志点植入到患者体内,则可以很好地解决这个问题,因为这些标记点在虚拟对象和物理对象中都便于医生选取[11]。然而,在患者体内植入标志点可能会引发额外的感染风险和不适感,因此这些方法还未被大范围推广[12]。
此外,还有一些机器人系统利用手术中采集的几张不同位置的X光片实现配准,这些X光片在经过图片校正后共同配准到3D虚拟对象上,即所谓的2D-3D配准[9]。比如,在一些系统中,医生凭借几张二维透视图像就可以完成规划任务,因此直接将几张术中的X光片作为虚拟对象进行配准也是一种可行的方法[13]。
术中超声图像具有实时性、无辐射等优点,一些研究者在骨科手术机器人系统中利用校准后的超声设备,获取患者病灶处骨组织的形貌,从而实现导航配准。具体地,超声设备有两种不同的追踪模式:基于振幅的A模式和基于亮度的B模式。在A模式下,医生需要保持超声探头垂直于待测量骨的表面,这在软组织过厚时较为困难,另外,测量精度取决于超声波在人体组织中的传播速度,但是这在不同患者之间具有差异性,需要有大量的实验数据支撑才能实现[14-15],因此该模式下的导航配准成功应用较为罕见。而B模式则可以扫描一个扇形区域内的组织,更加方便医生使用,但这种图像通常较为嘈杂,需要进行额外的处理[16]。
值得指出的是,如果虚拟对象是在手术过程中采集得到的,并且采集过程中成像设备与患者物理坐标系的相对关系被一些位姿追踪设备实时获取,那么在手术过程中每时刻采集得到的图像都可以直接建立到患者物理坐标系中,这时的配准过程会更加简单[9]。
2.3 目标跟踪技术
在一些手术系统中,为了实时跟踪患者在手术中可能出现的位移或者呼吸运动,会采用相应的跟踪设备。在一些早期骨科手术中,基于声学、磁学和机械方法等的跟踪设备被使用,而现在,大多数骨科手术系统使用的是基于红外光的主动/被动跟踪设备:前者使用一种能够主动发射红外光的LED作为跟踪点,后者则使用一种能够反光的球作为跟踪点,通过对这些点的跟踪以及从中识别出的特定几何形状,跟踪器可以获取多个坐标系之间的变换关系。此外,还有一些研究者从视频信息中获取已知几何形状物体的位置,这是一种可以代替红外光光学跟踪器的简单方法[17-18]。
然而,上述光学跟踪设备要求在手术过程中跟踪器和被跟踪点之间不能有视线遮挡,这需要医生在手术过程中做出相应的调整。针对此问题,基于电磁的跟踪系统被提出,其系统内置的磁场发生器可在手术区域内产生磁场,并且对放置在这个磁场内的接收线圈的位置、姿态进行测量,从而实现跟踪的目的,不需要担心视线遮挡问题,更加方便医生操作。但由于磁场很容易受到干扰,一些可能在手术中使用的金属物体会对测量精度产生较大影响[19-20]。
近来,基于惯性的跟踪设备在一些骨科手术中被成功应用,例如膝关节置换术[21]、椎弓根固定术[22]和髋臼周围截骨术[23]等。这种方法不存在视线遮挡和电磁干扰的问题,但是定位精度较低,并且测量计算较为复杂。
3 小结
骨科手术机器人自上个世纪以来得到长足发展,而且针对部分手术的骨科手术机器人已经成功应用于临床,但由于手术系统精度、患者手术安全等问题尚未得到完全解决,目前所取得的成绩远非理想目标。可喜的是,近年来许多智能设备、医疗机器人和人工智能技术逐渐成熟,这些将为骨科手术机器人的进一步发展提供更多的技术支持。
