井下跳汰机排料系统的电气自动化控制
2020-07-04于国琳
于国琳
(唐山开滦建设(集团)有限责任公司,河北 唐山 063000)
本文所研究的跳汰机是由筛板、风阀、机体、给料装置、排料装置组成,是材料分选的主要设备之一。在现代化的大型企业占有重要的地位。它的工作过程可以简单概括为筛板接受从跳汰机上落下的被选物料,得到一个较密集的物料层,也即床层[1]。在给料时,交变水流从跳汰机的筛孔给入床层,物料在这种水流中经过分选分层,然后以高灰度,高密度从跳汰机排出,来实现物料分选。为了减少损失,稳定产品的质量,跳汰机的排料要求高密度物料有一个适当的料层厚度。所以对高密度物料料层厚度的控制精度,直接影响着分选精度、产品质量以及经济效益。
目前具有结构简单、容易实现等特点的工业控制系统—PID控制系统得到了广泛的应用。排料过程系统存在许多不确定的因素,是具有非线性、多耦合性、大滞后的复杂系统。由于质量、风、水等参数的选择及调整不便,以及参数固有的缺点,一旦发生变化,很难按要求确定PID控制器参数,因此会导致排料速度过慢或者过快,降低了物料质量甚至会产生床层不稳定。若排料速度过快,有可能会出现中床层过薄或者研石层过薄。大排大放,甚至会出现排空情况导致床层出现不稳定状况。进一步会造成床层破换,不利于物料选择,造成较大损失。若排料速度过慢又会出现分选不及时造成重产物出现堆积,影响整个床层的松散程度。带来直接经济损失。我们借助采用进化策略与纯数值计算算法的遗传算法来解决特别困难的优化问题。本文将遗传优化算法应用到PID控制系统中,从而使产品质量得到了提高,降低了系统的控制、设计难度。
1 控制结构
图1为借助遗传算法优化的PID控制结构,从图中我们可以观察到利用遗传算法时PID控制参数不需要任何的初始知识便可以寻求到全局最优解。
作为本文研究的对象—PID控制器由两部分组成:一部分是如图1所示的虚线框内所示的传统的PID控制器,另一部分是遗传算法环节。前一部分用于处理偏差信号的微分、积分、比例计算以及权重相加的操作。跳汰机排料自动控制的目的是使床层稳定在某一期望值。后一部分旨在对全局进行求解优化,实现PID的实时地、在线地、准确地调整,无需了解被控对象的任何信息,按照某种指标根据系统输出的相关信息进行全局优化。
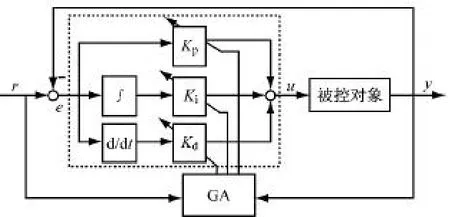
图1 基于遗传算法优化的PID控制结构

图2 利用遗传算法优化PID参数流程
2 遗传算优化方法介绍
(1)遗传算子。为了保证优良基因能够传给下一代,本文借助轮盘赌的方式实现参数优化。给定规模n=40,群体P = {a1, a2, a3,...,an},个体aj=P的适配值为f(aj),选择概率为:

为了将原有的优良基因遗传给下一代,我们利用交叉操作产生新个体,这些新的个体具有复杂的基因。这样一来就将丰富原来的基因库。所谓的交叉操作就是将新复制产生的匹配池中的个体两两进行随机匹配,从而交叉繁殖。作为本文的研究依据,我们用一点交叉方式。
自然界中由于各种偶然因素引起的基因突变我们借助变异运算来模拟,使得陷入局部最小值的情况得到了避免。
(2)目标函数。参数选择的最小目标函数对于动态特性的满意程度起着重要作用了。在本文当中,采用误差绝对值积分性能指标。从而来获得令人满意的动态特性。
得到的最优参数指标为:

式中:u(t )—控制器的输出;e(t )—系统误差;tu—上升时间;ω1, ω2, ω3—权值。
本文采用惩罚功能来避免超调,如若出现超调,选取超调量作为最优指标的一项。此时的最优指标可表示为:

式中:ω4—权值。
当系统动态过程的平稳性被强调时,此时ω4取值较大,且ω4≫ω3。
在这种情况下的适配值函数可以表示如下:

(3)遗传算法终止条件。借助第二代遗传种群的最大适应度的相对误差来确定遗传算法的操作终止条件。评判的形式标准为下式所示:

设定最大遗传代数后,经过多次遗传迭代,即使没有找到准最优解,当算法进行到最大遗传代数时也要终止算法。
(4)利用遗传算法优化的PID参数流程。图2利用遗传算法优化的PID参数的流程,其中初始化要确定PID控制参数的大致范围,在本文当中我们设Kp的取值范围为[0,20],Ki和Kd的取值范围在这里取为[0,1]。
3 仿真实验
(1)控制参数选择。在遗传算法优化运算中,寻找最优解的关键是合理的选择控制参数。权值ω1、 ω2ω3ω4在这里分别取0.99、0.002、1.49、99,群体的规模n=40,变异概率pm=0.034,交叉概率pc=0.79。
图4表示的为经过参数整定以后的PID控制系统的单位阶跃响应曲线。从图上可以发现在时间为0.15s时发生阶跃响应,所以调节时间为0.15s。没有出现超调现象,动态响应比较快;可以看到收敛速度快,所以此种算法有较好的鲁棒性。借助积分环节,系统动态响应快速精准,没有出现静差。

图3 目标函数J的优化过程

图4 参数正定后的系统单位阶跃响应曲线
根据仿真结果可以看到基于遗传算法的PID控制系统能够稳定给料时发生扰动的跳汰机床层,保证系统的正常工作。
4 结论
传统的经典PID控制器具有良好的实用性,同时还具有较强的鲁棒性特点。而借助遗传优化算法的PID控制器不但继承了以上的优点还充分利用了遗传算法的内在并行机制以及遗传诉法的全局寻优的优势特点对PID控制其参数进行了有效的控制,从而实现对跳汰机的排料系统实现有效地控制。结果表明借助于遗传优化算法的PID控制参数优化方法能够在线调整,实时性突出。又具备计算量较小的优点,兼顾了系统的动、静性能,在一定程度上克服了之前我们提到的难确定PID控制参数的缺点,具有一定的工程实用价值与应用价值。