搅拌摩擦焊接机器人形变及载荷控制方法研究*
2020-07-02房立金徐晓辉
房立金,张 月,徐晓辉
(1.东北大学机器人科学与工程学院,沈阳110819;2.东北大学机械工程与自动化学院,沈阳110819;3.上海航天技术研究院,上海 201109)
工业机器人的刚度通常为数控机床刚度的1/50[1–2],影响因素主要包括杆件柔性和关节柔性。杆件柔性为机械臂结构刚度较低导致,特别是机器人大臂与小臂。关节柔性来源有减速器柔性、支撑轴承柔性、同步带及传动轴柔性等[3]。由于柔性原因,加工作业的动态低频切削力作为激振力容易引起机器人颤振[4]。
传统加工领域,数控机床仍是加工的主要装备,工业机器人通常用于物料搬运、冲压压铸等简单操作[5–6]。机器人技术进步使其逐渐应用于铣削、钻孔、搅拌摩擦焊接等复杂的机械加工领域[7–9]。
工业机器人在进行机械加工时仍存在一些技术问题需要解决[10–11]。包括工业机器人刚性差、减速器齿隙影响机器人精度等,这些问题对机器人的精度均产生重要影响[12–13]。传统的串联工业机器人承载能力与刚度不足,较难以承受搅拌摩擦焊所需的巨大工件顶锻力,具有高刚度的并联机器人机构被越来越多地用作搅拌摩擦焊装备的主机构,串、并联机器人机构运动副存在间隙,随着作业时间的增加,系统作业精度和动力学性能会受到负面影响。
基于传统工业机器人的刚度特性及在加工领域的应用与现状,本文阐述了机器人搅拌摩擦焊接中搅拌头受力情况与作业载荷的控制方法,设计了一种高刚性机械臂结构并分析了其刚度特性。
搅拌摩擦焊过程受力分析
1 搅拌头受力
受力数学模型见图1。搅拌针和轴肩形状多样,受力分析时不考虑轴肩凹槽和搅拌针表面情况[14–15]。图2为搅拌针端面和轴肩。搅拌头轴肩与搅拌针端面承受平行于搅拌头轴线轴向力。假设搅拌针侧面前部受垂直于搅拌头轴线的压力,后部受力忽略不计,搅拌针侧面承受的摩擦力会产生与搅拌头旋转方向相反的扭矩。搅拌针侧面所受压力和摩擦力可以分解为与搅拌头轴线垂直和平行的两个分力。
搅拌针端面受到的平行于搅拌头轴线的轴向力为:

式中,p为稳定前行阶段轴向力,N;R1为搅拌针端面半径,mm。
轴肩受到的平行于搅拌头轴线的轴向力为:

式中,R2为搅拌针根部半径,mm;R3为轴肩半径,mm。
搅拌针端面所受摩擦力产生与搅拌头旋转方向相反的扭矩为:

图1 搅拌头几何模型Fig.1 Geometric model of stirring head
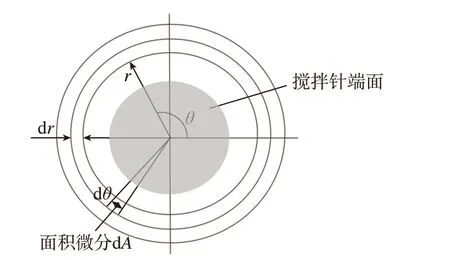
图2 搅拌针端面和轴肩Fig.2 Stirring pin end face and shaft shoulder

式中,μ为稳定前行阶段摩擦系数;θ为周向角。
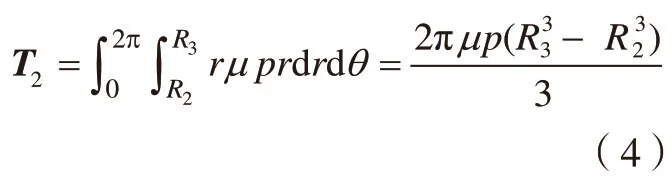
轴肩所受摩擦力产生与搅拌头旋转方向相反的扭矩为:
搅拌针侧面前部所受轴向力分解成平行于搅拌头轴线向上的力为:
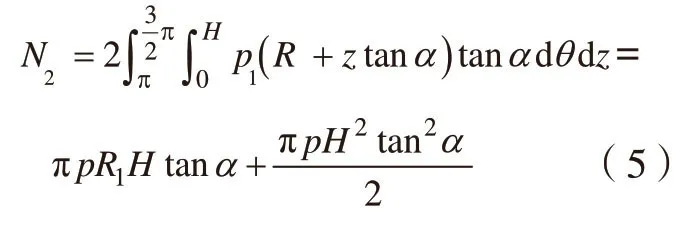
式中,H为搅拌针长度,mm;α为搅拌针的锥度角。
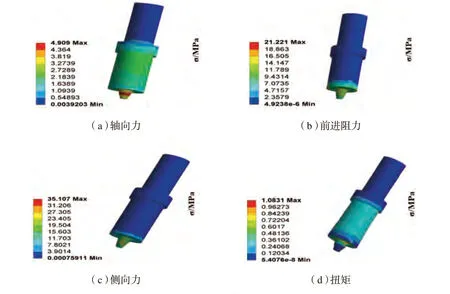
图3 静力学分析等效应力结果Fig.3 Equivalent stress results of static analysis
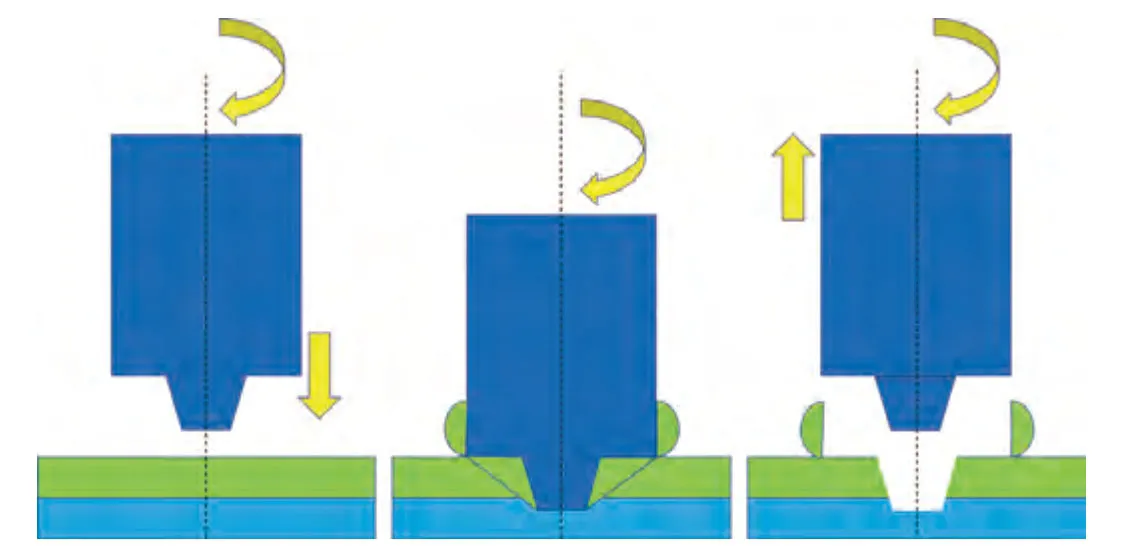
图4 搅拌摩擦焊点焊工艺Fig.4 Friction stir spot welding process
搅拌针侧面前部所受轴向力分解成垂直于搅拌头轴线与前行方向相反的力为:
2 搅拌头静力学模拟
根据实际作业工况为搅拌头施加轴向力、侧向力、前进阻力和扭矩。轴向力、前进阻力、侧向力施加值均为2000N。施加扭矩值为1N·m。图3等效应力结果表明搅拌头应力集中区域主要出现在搅拌针根部。
机器人作业中的载荷控制方法
(1)搅拌摩擦焊点焊。
搅拌摩擦焊点焊(图4)承受焊接作用力小,无前进阻力与侧向力,焊接过程较易控制[16]。
(2)优化搅拌头设计。
TWI 研发的凸轮形状搅拌头较好地降低了前进阻力与轴向力(图5(a))[17]。研究表明一种外开螺纹型搅拌头可以改善作业时材料流动,降低焊接压力1/3(图5(b))[18]。
双轴肩搅拌摩擦焊可以形成闭合的内部力(图6)。TWI和NASA等研究表明搅拌头承受轴向力为常规搅拌摩擦焊的1/4[19]。
静止轴肩焊接(图7)时分体式搅拌头轴肩不产生摩擦热[20],降低了对加工设备刚性的要求,较适合机器人搅拌摩擦焊接作业。
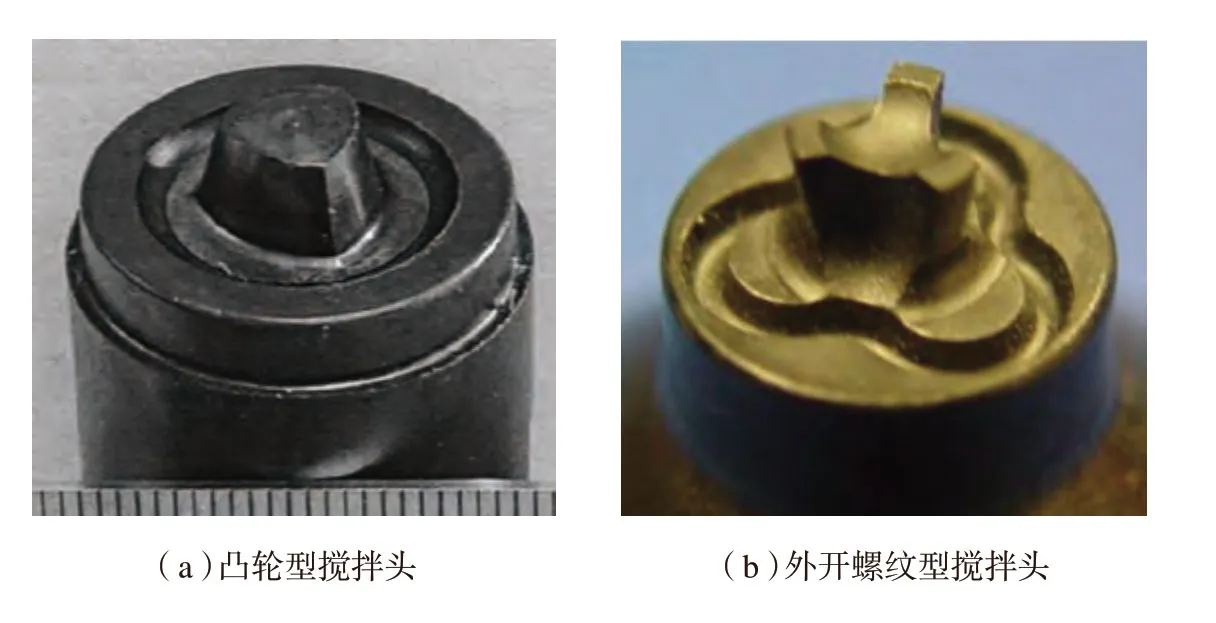
图5 搅拌头优化设计Fig.5 Optimized design of stirring head
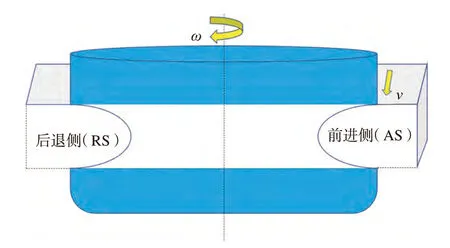
图6 双轴肩搅拌摩擦焊Fig.6 Biaxial shoulder friction stir welding
无轴肩搅拌摩擦焊(图8)采用锥体状搅拌头同时起到搅拌针与轴肩作用。Lammlein 等[21]采用无轴肩搅拌头焊接6061 铝合金,轴向力为相同工况下常规搅拌头焊接的1/4。
(3)焊接参数优化。
Hussein 等[22]对6061-T6 铝合金焊接发现,当搅拌头转速增大时轴向力明显减小。Widener[20]和Cook等[23]研究表明轴向力与旋转速度、轴肩下压量、焊接速度之间存在函数关系。搅拌头转速增大时搅拌头受力大幅降低,轴肩压入深度变化对轴向力有较大影响[24]。
(4)热源辅助搅拌摩擦焊。
热源辅助搅拌摩擦焊(图9)可提供额外外部热量,搅拌头承受的轴向力和旋转扭矩大幅减少。激光、电磁感应热源搅拌摩擦焊相对于无辅助热源工艺,可减小1/3的轴向受力和前进阻力。
(5)超声辅助搅拌摩擦焊。
超声辅助可以降低材料的屈服应力,超声振动一般施加于搅拌头(图10(a))或者直接施加于待焊材料(图10(b))。超声辅助可以提高焊缝拉伸强度和硬度,提高焊接质量。
(6)反馈测量补偿搅拌摩擦焊。
Guillo 等[9]采用反馈测量补偿搅拌摩擦焊接(图11)方法,基于焊接过程中的力测量,实时计算出修正后的路径,采用嵌入式实时补偿横向刀具偏差算法的机器人可以获得与龙门式数控系统相同的加工质量。
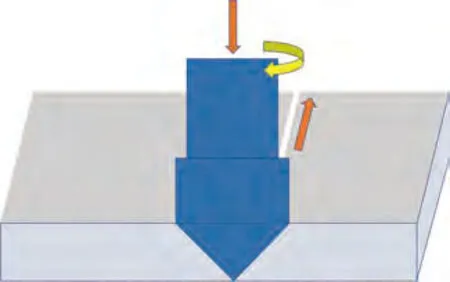
图8 无轴肩焊接Fig.8 Shaft-less shoulder welding
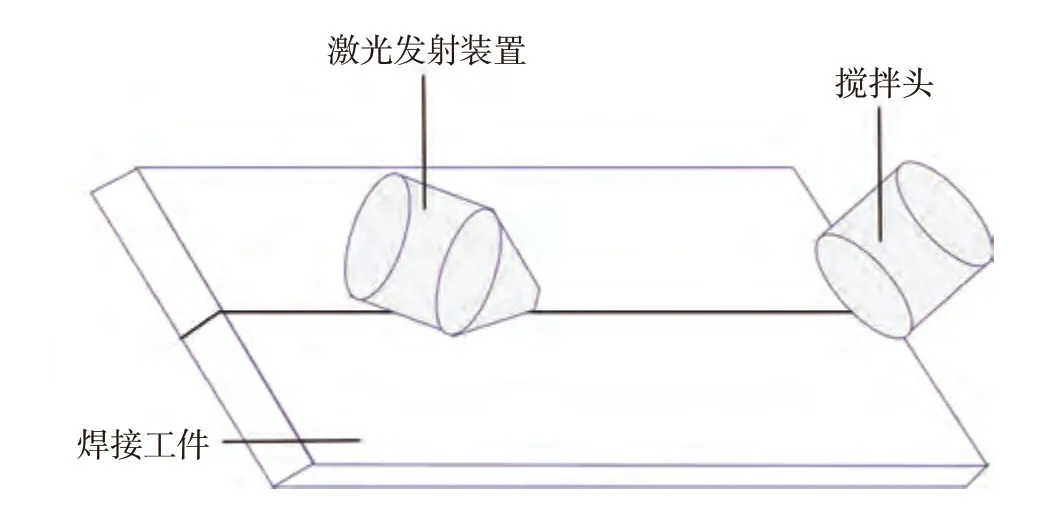
图9 激光辅助热源Fig.9 Laser-assisted heat source
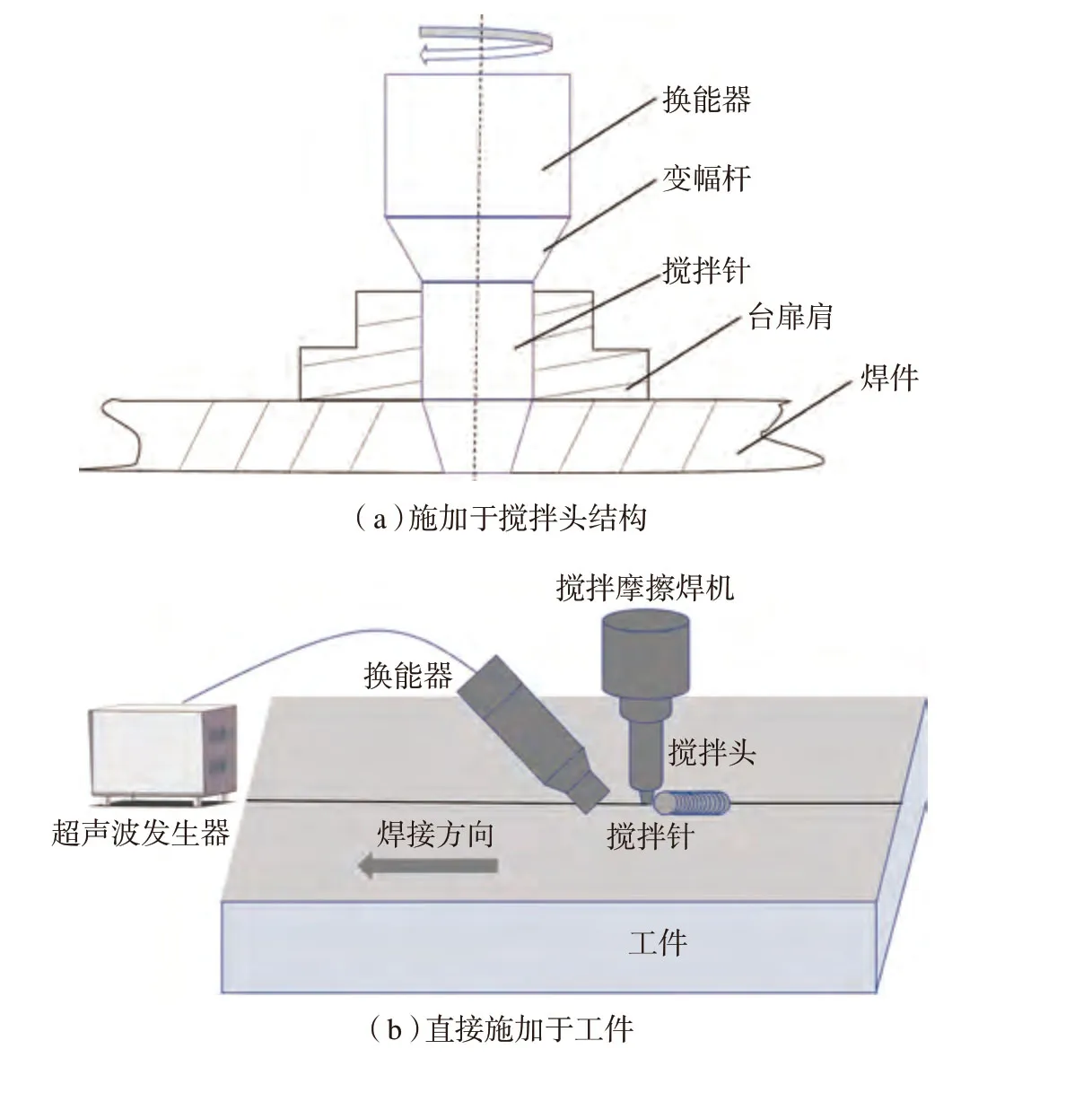
图10 超声辅助搅拌摩擦焊Fig.10 Ultrasonic assisted friction stir welding
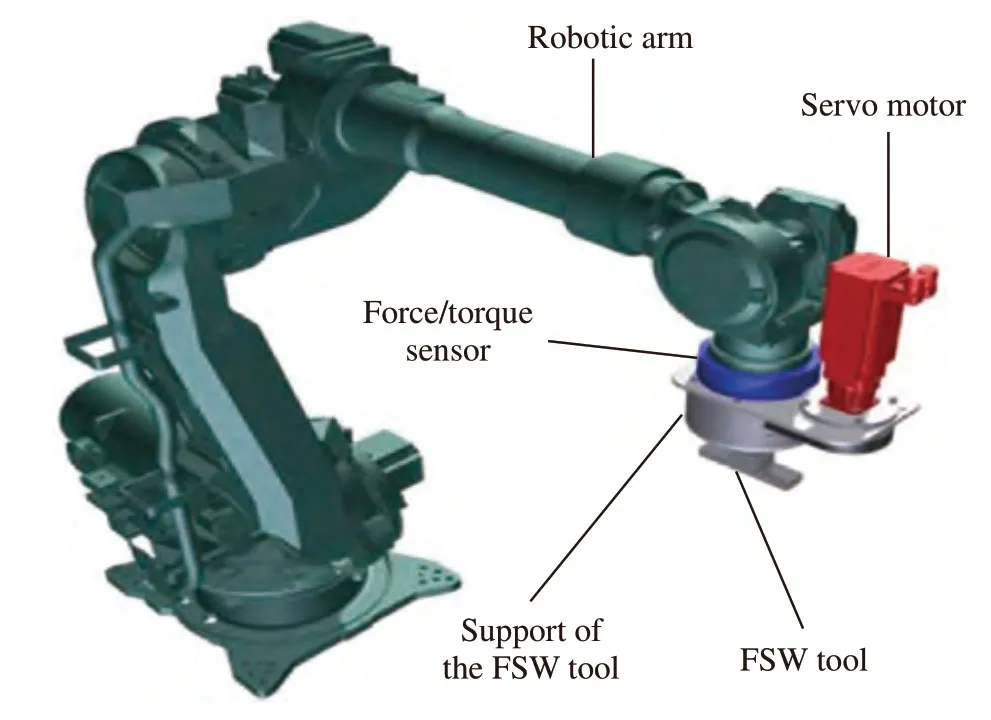
图11 反馈测量补偿搅拌摩擦焊Fig.11 Feedback measurement compensated friction stir welding
(7)改进机器人结构刚度和精度。
Bisu 等[25]选用3组机器人姿态(图12),末端姿态不变位置依次远离基座。分析结果表明工业机器人姿态、刚度、频率特性存在耦合性,可通过调整姿态获得稳定的焊接状态。
实际加工作业时通常采用机械臂末端加装压脚机构施加稳定的预压力,压脚机构可以提高机器人系统整体刚性,有助于提高加工精度和加工过程稳定性。
面向搅拌摩擦焊的机器人设计
图13为本文提出的面向搅拌摩擦焊设计的3 自由度机器人结构示意图。机器人主要由腕部、小臂、大臂、腰部、底座结构组成。机器人绕腰部可做回转运动,机械臂可在水平和竖直方向运动。
机器人底座结构如图14所示,由两台伺服电机[26–28]共同驱动对称布置在蜗轮两侧的蜗杆[29]来完成机器人腰部的回转运动。通过两台电机的主从消隙控制可以消除蜗轮蜗杆副的传动间隙与增加机器人运动精度,较好地提升了机器人动态响应能力。机械臂执行部件电动缸采用滚珠丝杠驱动,通过双丝母预紧消除反向传动间隙并提高电动缸的等效刚度,实现机器人无间隙传动。
机器人刚度建模及刚度特性分析
利用有限元软件对机器人进行建模,机器人底座与地面固定连接,外部单向载荷作用于执行器末端。将电动缸的丝杠简化为等直径细长轴,将丝母简化为轴孔直径与轴径相等的中空柱体,通过调整丝母轴孔与丝杠轴的配合面积大小使电动缸的等效刚度仿真计算结果与实际刚度结果一致。
机器人在工作时主要受焊接轴向力和自身重力,设置重力加速度,在机器人末端沿x、y、z方向分别加载一个单向外部载荷,可以表示为:

选取机器人3个位姿p1、p2、p3,其中p1和p3为沿x轴方向能到达的极限位姿,p2为大臂、小臂与z轴方向平行时位姿,分别分析得到机器人在外部载荷作用下沿x、y、z方向的综合变形结果,如图15所示。
通过计算分别得到相应位姿下机器人沿3个方向的刚度值,如表1所示。
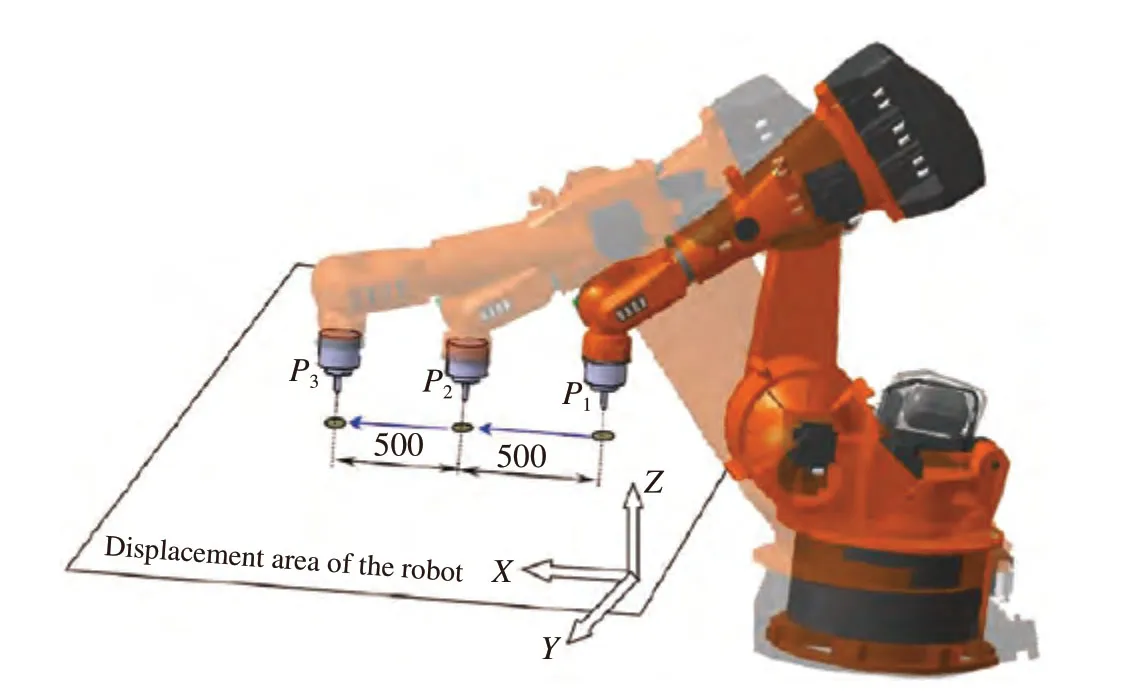
图12 机器人位姿变化Fig.12 Changes of robot pose

图13 机器人整体结构示意图Fig.13 Overall structure diagram of robot

图14 底座回转单元Fig.14 Base turning unit
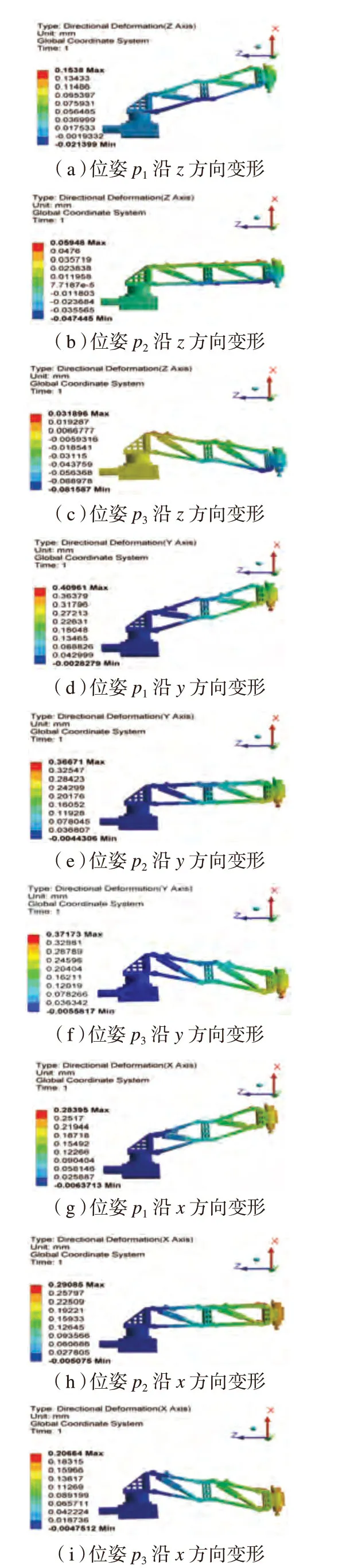
图15 整体变形云图Fig.15 Overall deformation cloud diagram
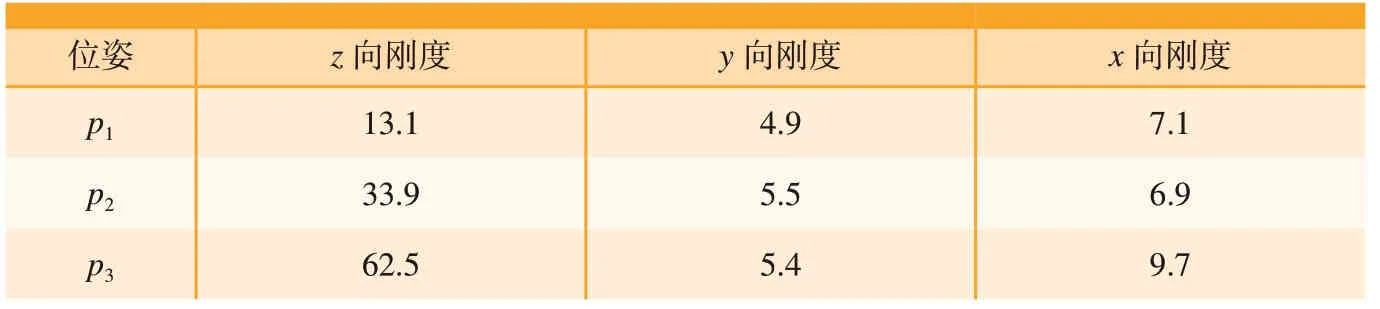
表1 机器人3个位姿下沿x、y、z向刚度值 Table1 Stiffness values along x、y、z direction of three robot poses N·μm–1
机器人加工作业时受位姿变化影响,沿z方向单向刚度变化情况较大,刚度值为13.1~62.5N/μm,沿x方向单向和沿y方向单向刚度变化情况较小,沿x方向单向刚度值为6.9~9.7N/μm,沿y方向单向刚度值为4.9~5.5N/μm,机器人整体刚度性能优于传统工业机器人。
结论
搅拌头应变区域主要分布于搅拌针根部。扭矩与轴向力对应变影响相对较小,侧向力与前进阻力是主要原因。控制作业时侧向力与前进阻力可获取稳定的加工状态。
机器人搅拌摩擦焊匹配合适的焊接方法与工艺对提高焊接质量有很大帮助。机器人搅拌摩擦焊可采用搅拌摩擦焊点焊、优化搅拌头设计和焊接工艺参数、热源和超声辅助、反馈测量补偿搅拌摩擦焊、改进机器人结构和刚度等,控制搅拌摩擦焊接的载荷提高焊缝质量。
针对传统工业机器人存在关节间隙与刚性方面的不足,提出了一种高刚性机器人结构,分析表明机器人具有较好的整体刚度性能。