适用于水下滑翔机平台的声矢量传感器设计
2020-07-01孙芹东张小川王文龙
孙芹东, 张小川*, 王文龙
适用于水下滑翔机平台的声矢量传感器设计
孙芹东1,2, 张小川1,2*, 王文龙1,2
(1. 海军潜艇学院, 山东 青岛, 266199; 2. 青岛海洋科学与技术试点国家实验室, 山东 青岛, 266237)
针对水下滑翔机缓动平台应用声矢量传感器用于水中移动目标探测时, 传感器姿态不能准确测量导致目标方位输出精度低的问题, 文中设计了一种具有姿态感知能力的声矢量传感器。首先, 将姿态传感器集成应用于声矢量传感器设计, 并对其进行参数测试; 其次, 将声矢量传感器集成在水下滑翔机平台, 并在消声水池对声矢量传感器进行等效噪声声源级测量; 最后, 利用水下滑翔机平台搭载声矢量传感器开展目标探测试验, 试验时以科考试验船为配合目标, 检验声矢量传感器在水下滑翔机平台应用时对噪声源的目标方位估计能力。海试结果表明, 经姿态校正后, 目标方位估计结果与全球定位系统推算方位结果基本吻合, 满足测向精度要求。文中研究可为声矢量传感器在水下滑翔机平台上的工程应用提供参考。
水下滑翔机; 声矢量传感器; 姿态; 目标探测
0 引言
水下滑翔机利用油囊改变自身净浮力在海洋中实现上浮下潜, 平台本身只在海面卫星定位、通信以及到达预设深度反转时消耗携载电池能量, 具有低功耗、长时序、长航程、低维护成本等特点, 已广泛应用于海洋水文环境观测等领域[1-2]。声矢量传感器可同时测量海洋移动目标辐射噪声场的声压和质点加速度信息, 在发现目标的同时即可测定目标方位, 因此, 通过在滑翔机平台集成声矢量传感器, 可用于执行长时序、大范围海洋环境噪声测量和移动目标探测等任务[3]。
声矢量传感器的优点是可测量低频、远距离、弱信号目标[4], 然而, 其在水下滑翔机等水下缓动无人声呐平台应用时, 自身姿态由于受海洋环境影响, 相对地理坐标系存在角度变化[5], 会对声矢量传感器水中目标方位估计产生不利影响[6]。为此, 文中设计了一种具有姿态感知能力的声矢量传感器, 将声矢量传感器所在坐标系转换到地理坐标系下, 以期提高目标测向精度。海上试验结果表明, 经姿态校正后, 目标方位估计结果与全球定位系统(global positioning system, GPS)推算方位结果基本吻合, 满足测向精度要求。
1 声矢量传感器姿态测量原理


2 声矢量传感器设计与集成
2.1 声学设计
由声矢量传感器设计理论基础可知, 如果满足声学刚性, 圆柱形声接收器的最大线性尺寸远小于入射声波波长, 且圆柱形声接收器平均密度与水介质密度近似相等, 则有以下公式成立[8]

由式(2)可知, 如果满足声学刚性、圆柱形声接收器平均密度与水介质密度近似相等, 则在水中声波作用下, 其振动速度与其等效声中心所在处水质点振速值幅值相等、相位一致。因此, 在圆柱形声接收器内部放置质点振速传感器, 且保证制作完成后尺寸和密度满足上述条件, 即可制作复合同振式声矢量传感器。
2.2 结构设计
水下滑翔机平台设计的声矢量传感器在结构上包含声压通道和3个正交的加速度通道, 为实时准确感知声矢量传感器姿态信息, 在声矢量传感器内部封装姿态传感器, 二者用刚性支架固定, 其结构剖面图如图1所示。
2.3 姿态传感器选取与测试
声矢量传感器实际制作时, 需要将姿态传感器作为姿态感知敏感元件封装在其内部。由于受到小体积要求的限制, 姿态传感器尺寸不宜过大, 考虑到设计的声矢量传感器为胶囊体结构, 姿态传感器选用自主设计、制作的微机电系统(micro electromechanical system, MEMS)姿态传感器, 其尺寸为25 mm×25 mm×3 mm、功率为0.25 W, 实物如图2所示。
MEMS姿态传感器横滚角、俯仰角和航向角的测量范围和精度如表1所示。由于洋流、浪涌以及潮汐等因素的影响, 声矢量传感器会随着水介质产生晃动, 即要求姿态传感器动态特性需要满足一定的指标, 文献[9]显示晃动频率主要集中在0.2 Hz以下的低频段, 因此本次动态跟随特性测试分别测量了横滚角、俯仰角以及航向角在0.1 Hz、0.3 Hz、0.5 Hz、0.7 Hz、0.9 Hz、1 Hz和2 Hz频率下的动态特性。在测试时, 低频段给定振幅为20°, 随着频率升高振幅逐渐减小, 在2 Hz频点处振幅为3.6°, 动态跟随特性试验结果如图3所示。
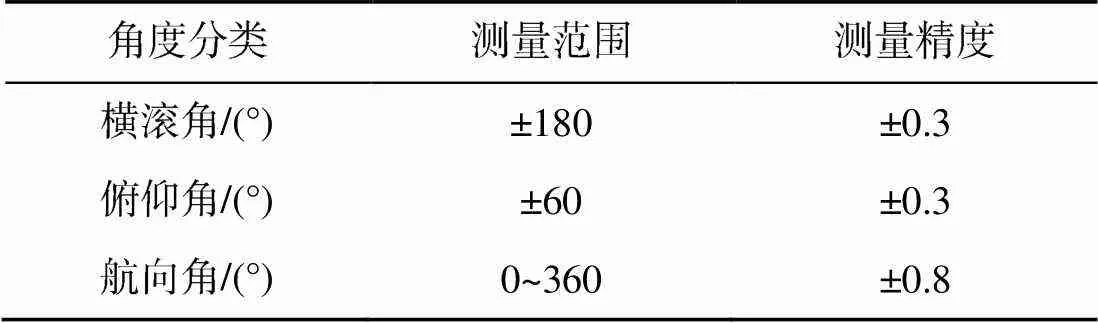
表1 MEMS姿态传感器参数
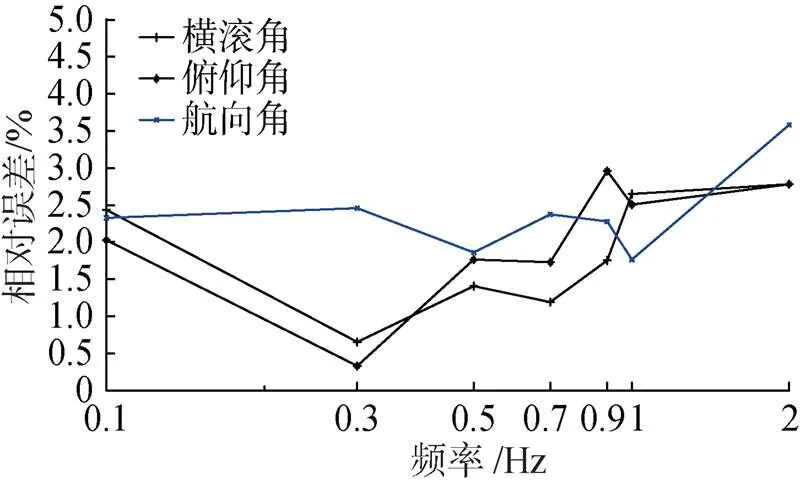
图3 MEMS姿态传感器动态跟随相对误差曲线
由图3可知, MEMS姿态传感器动态跟随特性测试结果为: 随着频率升高, 横滚角、俯仰角及航向角相对误差有逐渐增大的趋势; 在1 Hz以下频段, 相对误差均小于3%。
2.4 声矢量传感器参数测试


图4 声矢量传感器灵敏度测试曲线
在驻波管中, 通过选择测试频率, 保持发射机的发射功率不变, 旋转装置控制声矢量传感器旋转一周, 记录声矢量传感器被测量通道在不同角度时的输出电压值, 通过数据处理得到指向性图, 这里给出63 Hz频点处声压通道和加速度通道指向性测试结果, 如图5所示。

图5 63 Hz频点处声矢量传感器各通道接收指向性
从图5可知: 声压通道无指向性, 最大值不均匀性分别为1.3 dB; 加速度通道均具有“余弦”方向性, 各通道分辨力均不小于33.6 dB, 主轴最大值不均匀性不大于0.4 dB。
2.5 声矢量传感器等效噪声声源级测量
在实际工程应用中, 安装声矢量传感器的平台作为障板会对入射水声信号产生近场声散射, 严重影响声矢量传感器测向精度。因此, 声矢量传感器集成在水下滑翔机平台上时, 为降低声散射影响, 仿真分析了水下滑翔机平台对矢量水听器测向影响[11], 在水下滑翔机平台前端集成声矢量传感器探测单元, 其结构示意图如图6所示。

图6 声矢量传感器在滑翔机集成结构示意图
理论上, 作为一种目标检测设备, 接收点直流输出信噪比大于环境背景噪声级的时候就能够检测到目标, 完成目标测向, 但实际工程上受敏感元件自噪声、滤波放大电路、采集系统以及电磁干扰和屏蔽接地的影响, 目标监测设备自噪声会大于背景噪声, 当信号强度和背景噪声相当时, 并不能完成对目标的有效检测。因此, 为检验声矢量传感器目标测向能力, 有必要对接收系统等效噪声声源级进行测量。水池实验时, 以高斯白噪声为信号, 声源功率放大器增益旋钮调到最大, 慢慢调大高斯白噪声电压幅值, 矢量传感器刚好能对声源信号进行测向时, 接收系统输出端噪声级即为接收系统等效噪声声源级。
图7显示了声矢量传感器对声源的目标方位估计结果, 可以看出: 随着时间增加, 即随着声源发射声信号谱级的增加, 声矢量传感器对目标的检测结果经历了从无到有再到目标逐渐清晰的过程。
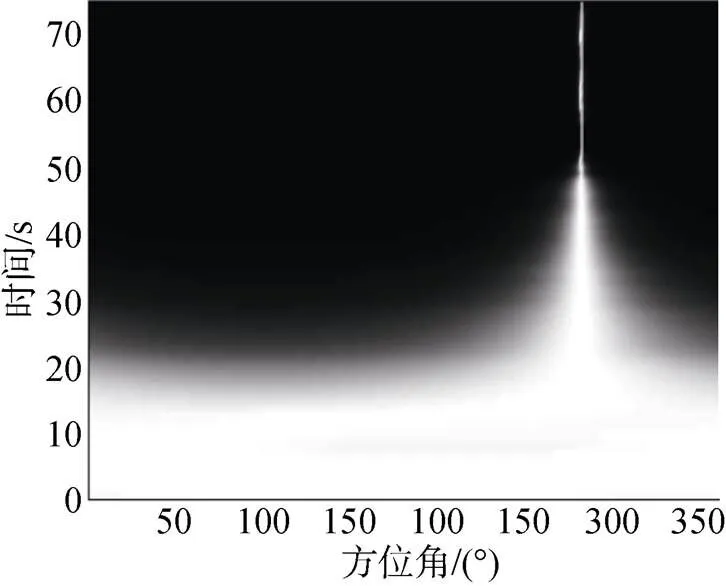
图7 目标方位估计
图8为1 000 Hz频点声信号谱级随时间的变化曲线, 可以看出: 随着时间增加, 声信号谱级逐渐增大, 图中实横线和曲线交点为声矢量传感器刚好能完成测向时, 1000Hz频点所对应声压级, 对应谱级为55 dB, 即在消声水池中接收系统等效噪声声源级为55dB@1 000 Hz。

图8 1 000 Hz频点处声信号谱级变化曲线
3 海上试验
2018年, 利用集成声矢量传感器及其信号处理设备的水下滑翔机在南海北部海域开展目标探测能力验证海上试验, 600 t科考试验船作为配合目标开展试验。试验时, 水下滑翔机采用剖面滑翔方式采集科考试验船辐射噪声信号, 科考试验船以10 kn速度直线航行。
图9给出了目标探测能力验证海上试验结果。如图9(a)所示, 09:31时刻滑翔机开始剖面滑翔, 09:35时刻声矢量传感器开始采集科考试验船辐射噪声信号, 10:01~10:15时间段水下滑翔机浮力驱动系统启动, 挤压油囊, 改变自身浮力, 排油上浮, 在10:01~10:15时间段由于水下滑翔机平台工况噪声较大, 声矢量传感器停止采集科考试验船辐射噪声信号, 10:15~10:35时间段继续采集科考试验船辐射噪声信号。图9(b)为09:35~10:01时间段姿态传感器输出声矢量传感器姿态信息, 由于声矢量传感器悬挂支架和水下滑翔机平台固定连接, 其姿态也反映了水下滑翔机剖面滑翔时的姿态。如图所示, 俯仰角数值介于20º~30º之间, 表示水下滑翔机头部向下倾斜, 处在下潜阶段。图9(c)和图9(d)分别为09:35~10:01时间段, 科考试验船相对水下滑翔机平台的推算距离和声矢量传感器计算输出科考试验船相对水下滑翔机平台的方位信息(转换到地理坐标系), 显示了科考试验船由远及近再到远的距离变化关系。
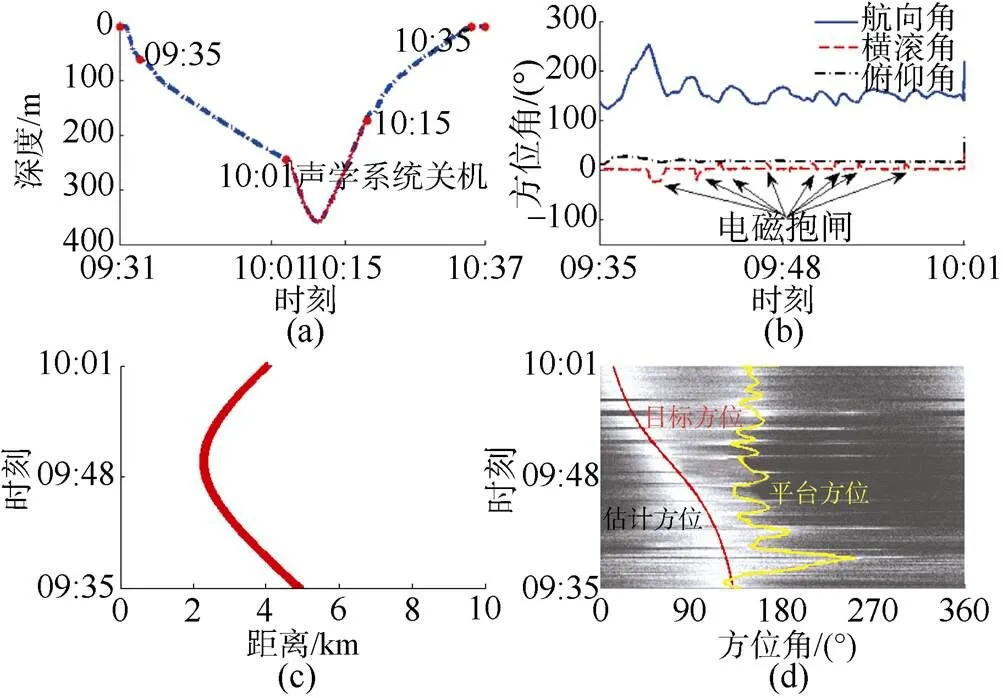
图9 目标探测能力验证海上试验结果
图9(d)显示, 声矢量传感器在采集科考试验船辐射噪声信号时, 还采集了存在的其他噪声信号, 导致其解算科考试验船目标方位不清晰, 方位精度低, 仅能大致给出噪声信号的方位历程。经对比分析, 该噪声信号为水下滑翔机平台航向调节过程中, 电池滚动到左右极限, 抱闸开关启停时产生的噪声。图10给出了水下滑翔机平台航向调节过程中声矢量传感器采集的时域噪声信号, 可明显看出由航向调节机构而产生的噪声脉冲干扰。水下滑翔机平台航向调节过程中, 航向调节机构通过电磁抱闸来实现转向机构自锁, 从而完成横滚角调节, 而抱闸开关会对航向调节机构产生较强的脉冲激励从而引起较强的振动噪声。图9(b)也显示了抱闸开关启停时, 振动噪声引起的横滚角数值变化。
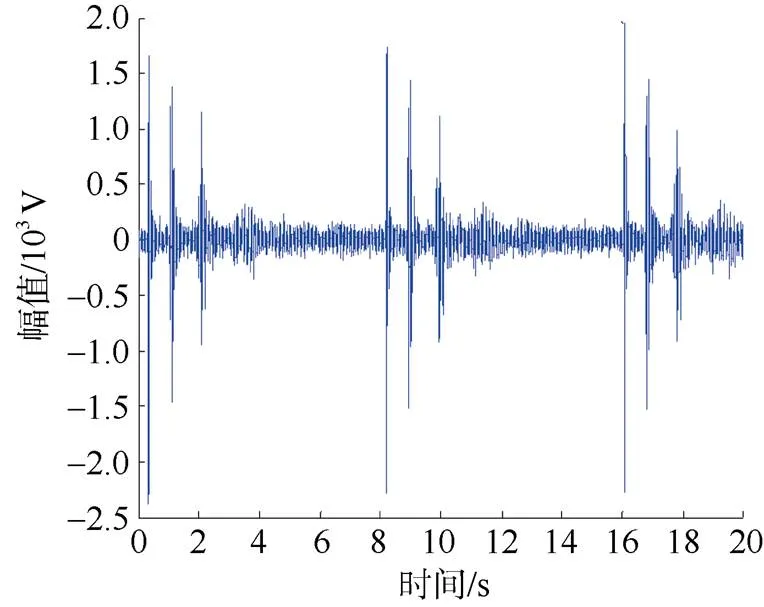
图10 声矢量传感器时域信号
此次海上试验结果表明: 09:35~10:01时间段声矢量传感器计算输出科考试验船相对水下滑翔机平台的方位信息, 经姿态校正后, 与GPS推算方位结果基本吻合; 由于水下滑翔机平台航向调节机构抱闸噪声干扰, 未能检验声矢量传感器在水下滑翔机平台应用时对科考试验船的最远探测距离。
4 结束语
文中将MEMS姿态传感器集成应用于声矢量传感器设计, 研制了小体积、高灵敏度姿态自感知声矢量传感器, 测试了其灵敏度、指向性等参数, 并在消声水池测试了声矢量传感器等效噪声声源级。同时利用集成声矢量传感器及其信号处理设备的水下滑翔机平台在南海北部海域开展目标探测能力海上试验, 试验结果表明, 在航向调节机构抱闸噪声干扰下, 声矢量传感器可对航速10 kn、距离5 km的600 t级科考试验船完成目标测向。基于水下声学滑翔机的目标探测技术是未来水下安防体系建设中水下无人移动探测体系的重要组成部分, 而包括声矢量传感器在内的目标载荷设计以及适应性集成应用是其重要研究内容, 未来还需进一步加强这方面的研究工作。
[1] 段桂林, 何希盈.无人水下航行器[M]. 北京: 海潮出版社, 2013.
[2] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106. Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Development of Underwater Gliders : An Overview and Pro- spect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106.
[3] 蒲勇, 袁富宇. UUV群探测系统仿真设计[J]. 计算机仿真, 2012, 29(1): 143-147. Pu Yong, Yuan Fu-yu. Designed of Cooperative Detection Simulation System of UUV Group[J]. Computer Simulation, 2012, 29(1): 143-147.
[4] 许娇, 张国军, 石归雄, 等. 纤毛式矢量水听器新型封装结构的研究[J]. 传感技术学报, 2011, 24(4): 517-521.Xu Jiao, Zhang Guo-jun, Shi Gui-xiong, et al. Advancements in Encapsulation of Hair Vector Hydrophone[J]. Chinese Journal of Sensors and Actuators, 2011, 24(4): 517-521.
[5] 牛嗣亮, 张振宇, 胡永明, 等. 单矢量水听器的姿态修正测向问题探讨[J]. 国防科技大学学报, 2011, 33(6): 105-110.Niu Si-liang, Zhang Zhen-yu, Hu Yong-ming, et al. Direction of Arrival Estimation from a Single Vector Hydrophone with Attitude Correction[J]. Journal of National University of Defense Technology, 2011, 33(6): 105-110.
[6] 尹天宫.运动小平台近场干扰抑制技术研究[D].哈尔滨: 哈尔滨工程大学, 2013.
[7] 孙芹东, 笪良龙, 侯文姝, 等. 一种新型姿态实时修正矢量水听器的设计[J]. 声学技术, 2015, 34(2): 304-307.Sun Qin-dong, Da Liang-long, Hou Wen-shu, et al. Design of a New Real-Time Gesture Correction Vector Hydrophones[J]. Technical Acoustics, 2015, 34(2): 304-307.
[8] 王文龙. 单矢量水听器目标方位估计研究[D]. 青岛: 海军潜艇学院, 2015.
[9] 陈宇中. 开环光纤陀螺性能改进及其在光纤矢量水听器姿态测量上的应用研究[D]. 长沙: 国防科学技术大学, 2011.
[10] 范继祥. 矢量水听器校准装置研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[11] 张小川, 王超, 孙芹东, 等. 水下滑翔机对矢量水听器测向影响研究[J]. 声学技术, 2017, 36(5): 327-328.Zhang Xiao-chuan, Wang Chao, Sun Qin-dong, et al. In- fluences by Underwater Glider on Measuring Direction of Vector Hydrophone[J]. Technical Acoustics, 2017, 36(5): 327-328.
1. 孙芹东, 兰世泉, 王超, 等. 水下声学滑翔机研究进展及关键技术[J]. 水下无人系统学报, 2020, 28(1).
2. 尹云龙, 杨明, 杨绍琼, 等. 基于水下滑翔机的海洋声学背景场观测技术[J]. 水下无人系统学报, 2019, 27(5).
3. 钱洪宝, 卢晓亭. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 2019, 27(5).
4. 刘来连, 闵强利, 张光明. “海鲟4000”水下滑翔机水动力特性与滑翔性能研究[J]. 水下无人系统学报, 2019, 27(5).
5. 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2).
6. 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 2018, 26(1).
7. 孙春亚, 宋保维, 王鹏. 翼身融合水下滑翔机外形优化设计[J]. 水下无人系统学报, 2017, 25(2).
Acoustic Vector Sensor Design for Underwater Glider Platform
SUN Qin-dong1,2, ZHANG Xiao-chuan1,2*, WANG Wen-long1,2
(1. Navy Submarine Academy, Qingdao 266199, China; 2. Qingdao National Laboratory for Marine Science and Technology, Qingdao 266237, China)
In view of the fact that as current underwater glider slow-moving platform applies acoustic vector sensor to moving target detection in water, the sensor posture cannot be accurately measured to result in low-precision output of target azimuth, this study designed an acoustic vector sensor with attitude awareness capacity. First, the attitude sensor was integrated into the design of acoustic vector sensor, and parameter testing was performed; Second, the acoustic vector sensor was integrated into the underwater glider platform, and its equivalent noise source level was measured in an anechoic pool; Finally, target detection test was carried out with the acoustic vector sensor mounted on the underwater glider platform, in which a scientific research and test ship was taken as the target to evaluate the noise source azimuth estimation ability of the acoustic vector sensor which was applied to the underwater glider platform. Sea trial shows that, after the attitude correction, the estimation result of the target azimuth is basically consistent with that of the global positioning system, and meets the accuracy requirement of the direction finding. This research may provide reference for the engineering application of acoustic vector sensor to underwater glider platform.
underwater glider; acoustic vector sensor; attitude; target detection
TJ630.1; TB565.1
A
2096-3920(2020)03-0309-06
10.11993/j.issn.2096-3920.2020.03.011
2019-10-12;
2020-01-02.
国防科技创新特区项目; 国家重点研发计划(2019YFC0311700); 青岛海洋科学与技术试点国家实验室“问海计划”项目(2017WHZZB0601).
*张小川(1990-), 男, 硕士, 讲师, 主要研究方向为水声换能器与基阵技术.
孙芹东, 张小川, 王文龙. 适用于水下滑翔机平台的声矢量传感器设计[J]. 水下无人系统学报, 2020, 28(3): 309-314.
(责任编辑: 杨力军)