基于柔性绳驱动的乳腺磁共振弹性成像用激励装置的开发
2020-06-24马昌玉杨晓冬刘德森朱建兵
马昌玉, 杨晓冬, 张 寅, 刘德森, 朱建兵
(1. 中国科学院苏州生物医学工程技术研究所, 江苏 苏州, 215163;2. 上海交通大学医学院附属苏州九龙医院, 江苏 苏州, 215028;3. 南京医科大学附属苏州科技城医院, 江苏 苏州, 215153; 4. 苏州科技城医院, 江苏 苏州, 215153)
磁共振弹性成像(MRE)能直接显示和量化组织的弹性,使“影像触诊”成为可能[1-4]。作为一种新型无创成像方法,MRE技术在乳腺癌检测,肝硬化分期,动脉粥样硬化斑块、肌肉损伤、大脑疾病检测等方面已经获得越来越广泛的应用[4-5]。用于MRE成像过程中成像组织剪切波发生源的磁共振弹性成像激励装置也在不断发展,而如何根据磁共振弹性成像的要求开发适用的MRE激励装置成为一个难题[6-9]。现有MRE成像用刺激装置往往难以实现激励信号控制精度与装置使用灵活性的兼顾。本研究利用柔性绳不可伸缩且灵活布置的特点,提出基于柔性绳驱动的乳腺磁共振弹性成像用激励装置的开发研究,现报告如下。
1 MRE激励装置的设计要求
MRE的原理见图1,典型的MRE系统包括MRE激励装置、磁共振成像系统和弹性图重建算法3个部分,利用MRE激励装置与待成像组织或器官相互作用产生具有一定幅度和频率的机械波,通过施加磁共振运动敏感梯度获得组织内质点的相位分布信息,对获得的相位图施加弹性图重建算法,从而获得组织内的弹性分布图[10-14]。
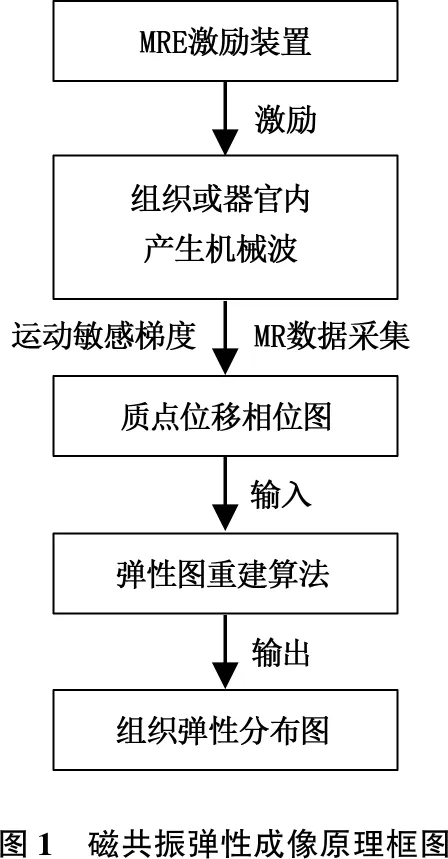
图1 磁共振弹性成像原理框图
进行MRE成像,首先需要通过外部激励装置对待成像组织施加激励,使组织内产生一定频率和振幅的机械波。稳定、精确的MRE激励装置是获得高分辨率组织弹性图像的先决条件,由于MRE成像环境的特殊性以及磁共振成像原理的要求,MRE激励装置开发需要满足相应要求。
1.1 激励装置与MR设备磁兼容
MRE成像首先需要通过磁共振成像方法获得在剪切波激励条件下的生物组织相位信息,由于磁共振成像原理的限制,磁共振设备磁体腔一定范围内必须确保没有磁性物质的存在,因此MRE激励装置需要进行特殊的结构设计。激励装置中电子设备和含铁磁性成分的部件必须放置在磁共振扫描室外,因功能需要,进入磁共振成像扫描室的元器件必须采用无磁材料,从而确保MRE激励装置和MR设备互不干扰,均能稳定工作[15-16]。
1.2 机械波的类型、振幅及频率
激励装置在成像组织内产生机械波的类型、振幅和频率均会对MRE成像结果有比较重要的影响。对于人体组织而言,进行剪切波(横波)成像的对比度要远大于纵波成像的对比度,因此激励装置产生的机械波以剪切波为宜[17-18]。剪切波频率越高,图像的信噪比越高,但随着剪切波频率的增加,剪切波在组织内的衰减将加剧,同时MRE成像要求组织内机械振动频率必须与施加的运动敏感梯度保持同步,过高的剪切波频率使得实现运动敏感梯度的难度增加。研究[19-21]表明, 50~1 000 HZ的剪切波可以满足MRE成像的要求; 剪切波的振幅增大, MRE成像灵敏度增加,但振幅过大时会使质点相位超过±180°范围,造成相位卷褶[22-24], 同时过大的振幅会使患者耐受度变差,同时设备的实现难度也增大。理想的MRE成像激励装置需要实现剪切波激励频率、振幅及相位的精确可控[25-26]。
2 MRE激励装置开发
MRE刺激装置的组成包括激励源、激励信号传递单元、执行终端和防护装置4个部分[24-26]。激励源是激励信号的产生源头,一般包含磁性元件,因此激励源与磁共振成像仪呈较远距离放置; 激励信号传递单元将激励源产生的信号传递至执行终端,从而带动待检测人体组织(乳腺)呈一定频率的剪切运动,产生剪切波; 防护装置将刺激装置的运动部分与人体隔离,确保成像过程的安全性。
2.1 激励源
激励源是激励信号产生的源头,其目的是产生一定频率和振幅的原始往复运动信号,一般由旋转马达与运动转换机构组成。运动转换机构将旋转马达的回转运动转化为往复直线运动输出,常见的旋转运动转化为往复直线运动的机构主要包括曲柄滑块机构和凸轮机构等。凸轮机构运动传递过程需要保证凸轮与凸轮杆时刻保持接触,运动传递过程中摩擦损耗大,结构相对复杂,因此本研究选择结构相对简单的曲柄滑块机构作为运动转化中介。曲柄滑块机构主要包括曲柄、连杆、滑块等核心元件及装置本体、回转轴承等辅助连接件。曲柄的长度决定往复运动的振幅,综合考虑振幅对成像灵敏度及患者诊断舒适性的影响,本研究选择曲柄长度即曲柄偏心距为0.5 mm, 曲柄滑块机构中连杆的长度主要影响滑块运动极限位置与曲柄中心的距离。激励装置在满足装配要求的前提下,要求整个装置结构尽可能紧凑,因此综合考虑曲柄及连杆安装空间,选择连杆长度45 mm, 滑块与装置本体通过直线轴承连接,从而最大可能减小运动传递过程摩擦损耗,减小能量损失。旋转马达的选型主要考虑激励装置要实现的激励频率及设备负载,本装置设定激励频率为0~100 Hz, 最终选择马达型号为安川SGM7J-02A, 该电机最大功率200 W, 最大转速6 000转/min, 可满足激励装置的要求,最终完成的激励源结构示意图见图2。
2.2 激励信号传递单元
激励信号传递单元是激励信号的传递枢纽,其主要功能为接收激励源的振动信号,并将其传递至执行终端,从而带动待检测人体组织(乳腺)按一定频率和振幅做剪切运动。考虑到激励源和执行终端远距离放置和信号传递结构灵活布置的要求,本研究选择不可压缩/伸长柔性绳作为激励信号传递的媒介,通过变向滑轮改变柔性绳的走向。柔性绳选择质量轻、强度高的尼龙绳,变向滑轮材料选择无磁性尼龙塑料,柔性绳一端与激励源输出端连接,根据走线路径的需要,通过变向滑轮改变走向后另一端通过无磁性材料制作的弹簧与磁共振扫描床固定端连接,合理控制无磁弹簧的拉力,从而保证信号传递过程中柔性绳始终处于绷紧状态,确保信号的无损传递。
2.3 执行终端
执行终端与待检测生物组织(乳腺)直接接触,将激励信号传递结构传递来的激励信号传导至乳腺组织,其设计需要保证执行终端和待检测组织的充分接触,并保证激励过程中患者的舒适性,同时考虑激励装置能量传递的要求,执行终端要尽量轻便。激励结构示意图见图3,执行终端与乳腺接触部位采用弧形结构设置,从而保证与乳腺组织的充分接触。执行终端采用碳纤维材料制作,碳纤维材料强度高、密度低,从而保证激励装置在小负载条件下运行,降低对激励源功率的要求。

图3 激励装置执行终端
2.4 防护装置
MRE成像过程中,激励装置呈高频往复运动,必须对有可能与患者身体接触的部分,如柔性绳、变向滑轮等进行防护,从而保证患者的绝对安全,因此必须设计对应的防护装置,从而隔绝激励装置与患者身体。本研究防护装置根据磁共振扫描床体结构设计,放置在扫描床表面,同时防护装置内设有柔性绳走线路径和变向滑轮安装槽,从而保证柔性绳布置的需要。
3 小 结
本研究最终完成了基于柔性绳驱动的乳腺MRE激励装置的设计开发,其总体结构示意图如图4所示。该MRE激励装置可根据MRE成像对磁屏蔽及放置空间的需求,灵活调整柔性绳长度及路径,可实现刺激频率调节范围0~100 Hz, 激励振幅0.5 mm, 且可根据刺激强度需要,更换激励源曲轴部件实现激励振幅0~0.5 mm可调。柔性绳驱动的乳腺MRE激励装置克服了传统激励装置难于实现的设备使用灵活性与剪切波精度控制的难题,可为高精度MRE的成像提供设备支持。
