液压摆动缸输出角度验证方法
2020-06-18杨兆林勾利娜
张 柁,张 园,杨兆林,勾利娜
(1.中国飞机强度研究所 全尺寸飞机结构静力/疲劳重点试验室,陕西 西安 710065; 2.西安长庆科技工程有限责任公司,陕西 西安 710021;3.长庆油田勘探开发研究院, 陕西 西安 710021;4.西部机场集团有限公司,陕西 西安 710075)
液压摆动缸是能将液压能转换为机械能,实现往复摆动的执行元件[1-2]。主要原理是把一般线性活塞运动转化为旋转轴转动输出,活塞外表面带有一组螺旋齿,与缸体内表面的螺旋齿匹配,加工在活塞内表面的螺旋齿与输出轴上的螺旋齿啮合。ARP25/180具有结构紧凑、承载能力高和零泄漏等特点[3]。该产品的最大输出角度为±90°,最大扭矩值200 N·m。
为了验证该型液压摆动缸可以实现0°~110°旋转,本文设计了液压摆动缸输出角度,以此进行研究来验证试验。
1 设备简介
1.1 液压摆动缸简介
试验中选用MOVECO生产的ARP25/180型摆动缸,如图1所示。该型设备的工作油源压力为21 MPa,与目前国内大部分液压设备的使用油源压力相同。该型摆动缸的基本控制原理图如图2所示。从图1可以看出,摆动缸下端为A孔,上端未连接油管的为B孔,并非严格确定哪个是进油孔,哪个是出油孔,这是根据旋转式作动器的旋转方向确定的。当A孔进油时,B孔出油完成B—A方向的旋转运动,反之则为A—B方向的旋转运动。

图1 液压摆动缸的实物照片
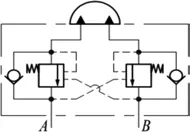
图2 液压摆动缸的控制原理图
由于摆动缸A孔与B孔的尺寸与现有的油管接头不匹配,因此需要设计专用的转接接头及转接油管。液压摆动缸作为执行元件,与其相连的控制调节元件包括伺服阀、电磁阀。
1.2 角位移传感器简介
试验中采用RVIT15-60型角位移传感器,如图3所示,其原理是仿效电位计,输入电压的任何变化都会导致输出电压相应的变化。尽管此输出是比率输出,RVIT-15-60能够提供相当高的比例系数,在±60°的扩展量程内,每度为50 mV。此外,RVIT的非接触式设计具有极高的精度(±0.25%FS),理论上接近无限的使用寿命。

图3 RVIT-15-60型角位移传感器
角位移传感器的输出为电压信号(模拟信号),并需要激励电源,测试时使用了MTS系统提供的激励电源(电压10 V),通过分压的方式为角位移传感器提供5 V激励。角位移传感器控制接入方式示意图见图4。经过研究发现,角位移传感器的输出有两种方式接入到控制系统,一种是从传感器通道面板接入(需要改造传感器线路);另一种是从模拟输入通道接入(需要专用接头)。本次测试角度参量要参与闭环控制,因此选择第一种接入方式。

图4 角位移传感器控制接入方式示意图
2 试验简介
2.1 试验原理
在试验中,设计了专用夹具将角位移传感器和液压摆动缸连接在一起,使角位移传感器与液压摆动缸在运动过程中同轴旋转,从而实现角位移传感器对液压摆动缸旋转角度的实时监测。沿液压摆动缸四周粘贴刻度条,用来监视试验过程中摆动缸运动的角度。控制系统采用MTS Flex Test 200,控制精度优于1%。由于现有角位移传感器量程为±60°,为了使角位移传感器量程达110°,在试验前需调节角位移传感器到-55°,以此为基准转向55°。在试验中设置了一个虚拟通道,将-55°作为0°,从而将角位移传感器的量程转换为0°到110°。试验原理如图5所示。
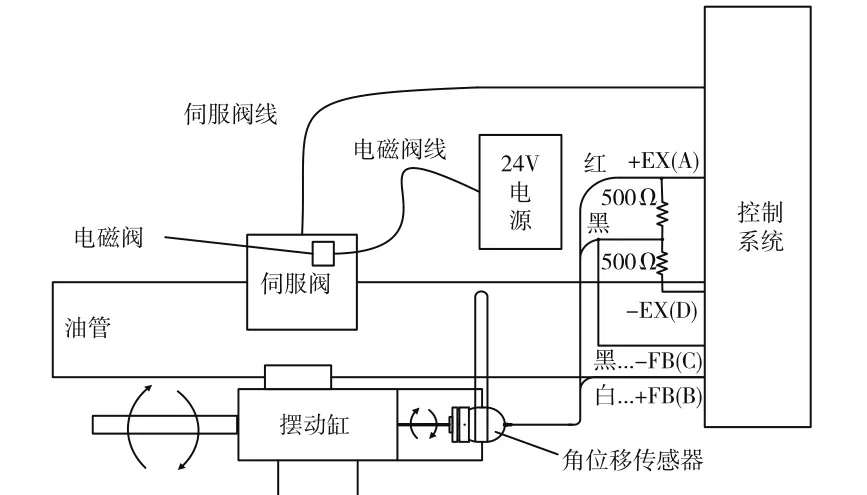
图 5 试验原理图
2.2 试验安装
通过设计的专用夹具将角位移传感器与液压摆动缸同轴连接,沿液压摆动缸四周粘贴刻度条,然后将其固定在作动筒底座上,液压摆动缸A孔接进油管,B孔接出油管。现场安装如图6所示。

图6 试验现场安装图
2.3 试验程序
2.3.1 试验前准备
在现场安装完成后,需要进行试验调试。主要检查各加载设备运行是否正常,控制设备是否可靠,采集设备运行是否正常,并排除预试中检查出的一切可能影响试验正常进行的问题。
在设备调试无误后,顺时针旋转液压摆动缸至极限位置,再调节角位移传感器至0°(虚拟通道读数)。
2.3.2 正式试验
在调试后,开始正式试验,正式试验按以下程序进行:
(1)加压并检查油路、控制系统、加载设备是否正常;
(2)以5.5°为一级,沿逆时针方向按程序逐级旋转至110°;
(3)以11°为一级,沿顺时针方向按程序逐级旋转至初读数后卸压;
(4)用刻度条监视液压摆动缸的旋转角度。
2.4 试验结果
试验中命令和反馈曲线如图7所示。

图7 命令和反馈曲线
从图7可知,在试验过程中命令-反馈吻合较好,即反馈值和命令值的误差较小,最大误差为0.4°,说明摆动缸的跟随性比较好,从而说明液压摆动缸可以单向旋转到110°。
在试验中,应急卸载的曲线如图8所示。

图 8 应急卸载曲线
从图8可以看出,在应急卸载时,液压摆动缸反馈值保持不变,液压摆动缸会锁定在应急卸载位置。
3 结 论
针对某工程操纵系统操作试验驾驶盘偏转角度需求,设计了液压摆动缸输出角度验证试验,证明了ARP25/180型液压摆动缸可以实现0°~110°旋转,为后续试验使用奠定了基础。
