城市轨道交通车辆牵引与负载模拟半实物仿真平台设计
2020-06-17渠开发武奇生陈圆媛张会欣
渠开发,武奇生,陈圆媛,张会欣
(1.长安大学 电子与控制工程学院,西安 710064;2. 河南交通投资集团有限公司,郑州 450000)
0 引 言
城市轨道交通规模不断增大,如何合理有效地研究车辆控制性能成为了亟待解决的问题。研究牵引电机传动系统控制方法,需要考虑牵引电机的负载特性并建立牵引电机负载模拟系统,为研究方案提供接近真实的电机运行环境[1]。电动负载模拟系统利用交流电机或直流电机把电能转换成转子的机械能,通过控制转矩的形式为承载设备进行加载来模拟负载,因此负载模拟系统实质是对转矩的控制。为了使电动负载模拟系统的机械特性与实际机械负载相同,模拟系统应能够迅速补偿因承载对象速度改变而出现在负载电机中的反电动势[2]。
由于电机负载在机电测试、民用以及国防各领域的巨大作用,我国已对电动负载模拟技术进行了相关研究。文献[3]利用电流、转矩双闭环复合控制策略,使用内模控制的策略设计了转矩、电流调节器,以此设计了基于他励直流电动机的负载模拟系统。在负载模拟系统基础上,借助 Matlab对系统进行仿真研究。文献[4]以永磁同步电机作为加载电机,分析了负载模拟器的工作原理,并推导、构建了模拟系统的数学模型。 使用PID 算法对电流、转矩进行双闭环控制,为防止加载对象主动运动而引起多余力矩,引入前馈补偿。 随着我国工业化进程的不断加快,对电机负载模拟技术的研究将更加的深入。
国外对电动负载模拟技术的研究工作开展较早,并已取得了一系列成果。早在1998 年,英国的 Hewson C.R.等人[5]通过控制作为负载电机的直流电机,模拟了线性以及非线性机械负载特性,并比较了多种控制方案。韩国的Ryu Hyung Min 等人[6]选取普通直流电机作为负载电机,并模拟高速电梯牵引电动机负载特性的系统。但是这些方法都具有一定的局限性,难以在实际工程中,尤其是模拟实际城市轨道列车牵引电机负载中得到有效应用。
车辆运行负载模拟技术可以克服真车试验成本大、可行性较低及试验周期长等缺点,具有非常高的学术、工程运用价值。本文首先计算了列车牵引力与阻力,从力的角度构建列车牵引负载转矩的数学建模,等效转动惯量,建立一套由牵引电机系统、负载系统、数据采集系统构成的城市轨道交通车辆牵引与负载模拟半实物仿真平台。并通过软件编程设计来测量和采集相关数据,实现阻力加载系统和牵引系统的转速、转矩的闭环控制。仿真以及实验结果均证明所提出的系统控制方法合理有效,能准确模拟列车牵引电机负载。
1 仿真平台系统设计
本城市轨道交通车辆牵引与负载模拟半实物仿真平台由牵引电机及其控制系统、惯性负载及其加载系统、虚拟仪器测控设备以及工控计算机组成,仿真平台实物如图1所示,作品实现了小型化,一体化 。利用皮带飞轮组模拟惯性负载。使用了永磁电机进行负载阻力的电模拟方式,相较于液压模拟,磁滞模拟具有体积小、阻力模拟精度高等众多优点。并使用铝型材搭建整体框架,可重塑性能强。
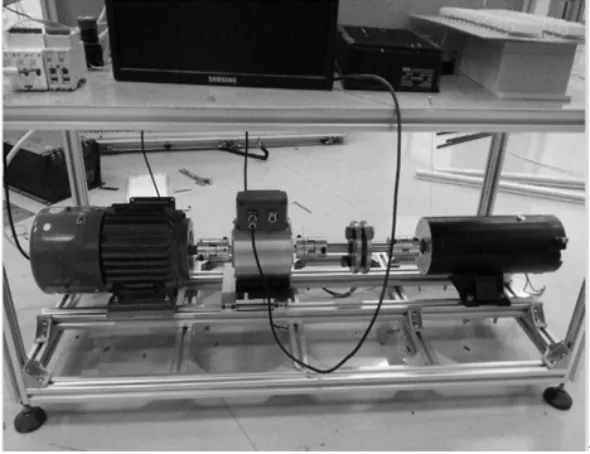
图1 1仿真平台实物图
2 仿真平台实现
2.1 理论分析
城市交通列车在运行过程中受到的运行阻力,主要包括基本阻力、曲线附加阻力、隧道附加阻力和坡道附加阻力等阻力[7]。从力的角度推导牵引电机负载转矩数学表达式,并将轨道列车运行时的旋转惯量和平动惯量折算成飞轮的转动惯量,为之后的负载阻力模拟加载试验平台的建立提供理论基础。
从力的角度推导出牵引电机负载转矩数学表达式,首先分析如图2所示的动力传动机构的受力情况。
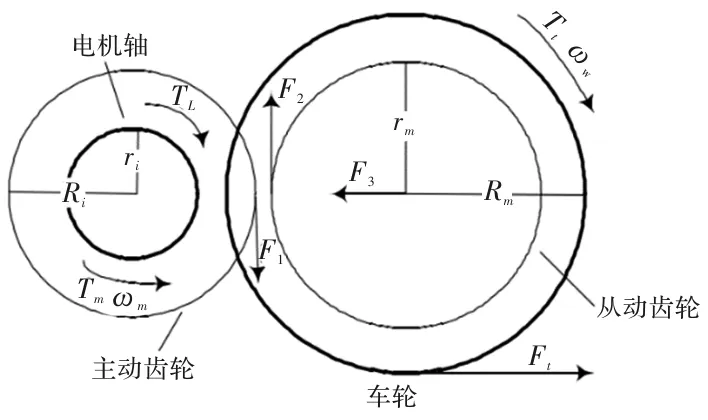
图2 轮对传动机构受力分析
图2左侧为牵引电机和传动机构,右侧则为轮对和传动机构。细线代表传动齿轮,粗线代表电机轴和轮对。图中箭头表示电机、车轮转动方向。采用了列车阻力经验公式推导牵引电机负载表达式[8],并忽略部分因素。
对于牵引电机,有转矩公式:
(1)
列车在运行时,牵引电机的主动齿轮和轮对的从动齿轮之间存在一对作用力F1和反作用力F2:
F1=F2
(2)
将F1和F2转化为转矩的形式,F1转换为牵引电机的负载转矩TL,F2转换为传动转矩Tt:
TL=F1r1
(3)
Tt=F2R2
(4)
在铁路上,定义齿轮传动比为
(5)
由于列车在行驶过程中,钢轨与轮对之间会出现蠕滑现象,且二者存在蛇形运动,当车轮以角速度ωw转动时,列车以速度v行驶,理论上车轮转动的线速度应和车辆行驶速度相等。但由于轮对与钢轨之间出现的蠕滑现象,在利用角速度计算列车的运行速度时须加入衰减系数ε:

(6)
图3分析了单节列车运行时的受力情况,为了便于计算,将转向架以及车体看作为一质点,由于上述的受力公式中已考虑了部件摩擦损耗,因此可以认为列车传动机构的各个部件之间存在作用力和反作用力,公式如下:
(7)
(8)
(9)
Fr5=N2Fr4
(10)

图3 单节列车的受力分析
推导公式时,忽略由于车钩力等因素而导致的阻力分配不平均的情况,假设车辆行驶时的基本阻力 平均分配给每节列车车厢,将式(5)、式(6)带入上式,可获得基本运行阻力F与ωm的关系:
(11)
最终推出牵引电机负载转矩:
(12)
2.2 仿真平台设计制作
设计制作城市轨道交通车辆牵引与负载模拟半实物仿真平台,图4为机械总体设计图。仿真平台由四部分组成。
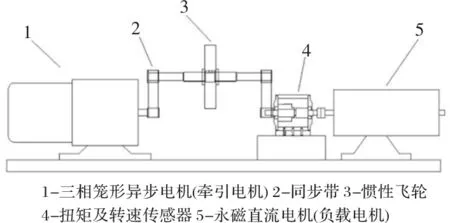
图4 机械总体设计图
2.2.1 牵引传动系统
牵引传动系统是城市轨道列车的重要组成部分,负责为车辆运行提供动力,不同的城市轨道列车牵引系统虽然组成各不相同,但基本由以下几部分组成:高速断路器、牵引电机,受流系统(集电靴/受电弓)、牵引逆变器(VVVF)、牵引控制单元(DCU/UNAS)以及制动电阻等。为更加真实有效的模拟城市轨道列车的牵引系统,采用1.75 kW的交流异步电机和三菱的AC700变频器,将380 V工频交流电经过整流逆变单元的调压、滤波、整流后模拟轨道车辆直流母线供电,经过牵引以及制动逆变电路把直流电逆变为幅值和频率可以调节的交流电,给三相交流异步电机供电。
2.2.2 惯性飞轮系统
惯性飞轮系统能够模拟列车行驶时的平动、转动惯量,通过转动惯量可以模拟列车运行时受到的加速阻力来测试牵引加速能力。本文采用三级飞轮来模拟列车运行时的空载、满载以及超载等三种不同工况。
2.2.3 测控系统
建立测控系统,采集数据通过信号调理电路再输入数据采集卡采集到计算机,通过Labview进行处理分析并以图形曲线形式显示在面板中,后期通过调用Matlab代码来输出负载控制信号,使用驱动电路控制负载电机,从而模拟不同的工况条件。基于Labview的城市轨道交通车辆牵引与负载模拟半实物仿真平台的测控系统由数据采集卡、传感器、工业控制计算机以及Labview程序构成。基于Labview软件,通过数据采集卡等硬件设备能够实现对交流异步电机运行状态进行快速无误地检测,采集并显示电机转矩、转速等基本参数。
基于LabVIEW的城市轨道交通车辆牵引与负载模拟半实物仿真平台系统软件主要包括了6个模块:参数初始化模块、串口通信模块、牵引电机控制模块、负载阻力加载模块、实验数据处理模块以及运行线路设计模块。牵引电机的控制模块是系统软件的核心,包含牵引电机转速的控制以及牵引电机负载转矩的计算。通过串口与变频器进行通信来控制牵引电机转速来完成对牵引电机的控制。牵引电机负载转矩的计算是实现模拟实际列车的数学建模过程。负载阻力加载模块主要包括手动和自动加载区域。手动加载区域可以方便使用者进行研究调试,而自动加载区域则是通过给定相关参数,直接绘出速度曲线和负载曲线,实现对牵引电机和负载电机的自动控制,使系统更加智能化。软件主界面如图5所示。

图5 软件主界面图
2.2.4 负载模拟系统
负载模拟系统能够模拟列车行驶时受到的阻力,通过模拟负载的加载可以使牵引传动系统与实际运行工况更加接近。由于城市轨道列车运行时通常由6到8辆列车编为一组,每列车有4到6节动车组成,每节车有4台牵引电机,实验中系统不足以模拟整列车的运行阻力,所以系统将列车的运行阻力分别平均分配到各台牵引电机,通过负载转矩的形式加载到牵引电机上来模拟列车运行时的阻力。
3 结果分析
城市轨道交通车辆牵引与负载模拟半实物仿真平台就是根据采集的牵引电机转速来计算列车运行受到的基本阻力,并且根据实际城市轨道交通车辆参数算出列车运行的各种附加阻力,使用Labview软件计算出每台牵引电机的负载转矩,并通过负载测功机的转矩闭环控制加载到牵引电机上。以此能在平台的虚拟仪器端显示列车运行时的负载变化曲线以及转矩变化曲线。
研究所得的城市轨道交通车辆牵引与负载模拟半实物仿真平台负载加载有手动加载和自动加载两种模式。
(1)手动加载
手动加载是依据电机运行的速度来控制负载电机转矩的加载,可以通过手动操作加载任意数值,使系统调试更加方便。
(2)自动加载
图6为自动加载时采集的牵引电机电流、电压的曲线,由图可以看出,牵引电机在起动时,起动电流很大,之后逐渐减小,并最终趋于稳定值。而牵引电机的电压则随着时间一直增大,逐渐趋于稳定,并保持不变。
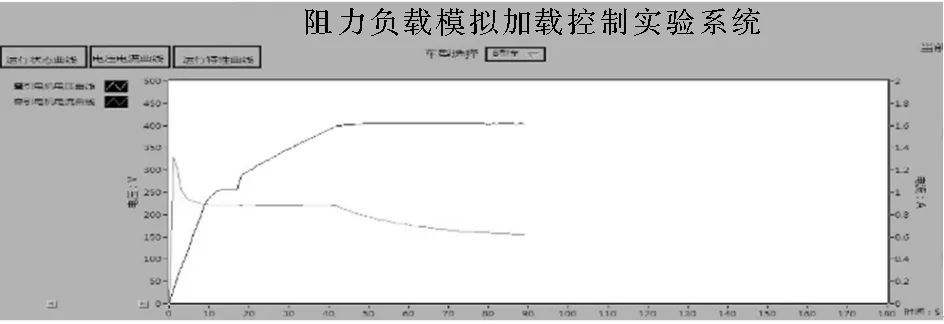
图6 自动加载下牵引电机电流电压曲线
如图7所示,为系统运行时,牵引电机的转速以及负载转矩曲线显示,随着电机的运行,牵引电机转速逐渐增大,负载转矩也逐渐增大,这和自动加载设定有关。
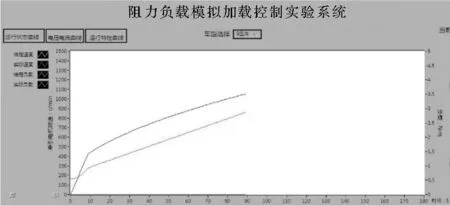
图7 牵引电机的转速和负载转矩曲线图
图8为牵引特性的运行特性曲线显示:
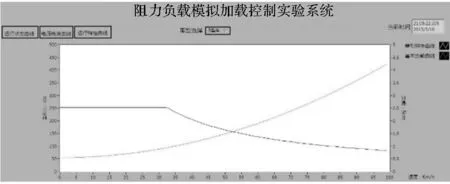
图8 运行特性曲线显示
由以上所测牵引电机各项数据可以看出,电动负载模拟系统的机械特性与实际机械负载相符合,故城市轨道交通车辆牵引与负载模拟半实物仿真平台能准确模拟列车牵引电机负载。
4 结 语
该文通过对列车运行进行受力分析,建立一套由牵引电机系统、负载系统、数据采集系统构成的城市轨道交通车辆牵引与负载模拟半实物仿真平台。并通过软件编程设计来测量和采集相关数据,实现阻力加载系统和牵引系统的转速、转矩的闭环控制。仿真以及实验结果均证明所提出的系统控制方法合理有效,能准确模拟列车牵引电机负载。后期与列车自动控制系统(ATC)结合,在不同行车工况下,显示牵引电机数据,调控动力分配,具有一定的学术价值与工程运用价值。
