非正弦驱动对电机噪声影响及优化
2020-06-17张亮,宫佐,单聪
张 亮,宫 佐,单 聪
(1.西安微电机研究所,西安710077;2.陆军装备部驻西安地区军代局驻西安地区第八军事代表室,西安710065)
0 引 言
随着电力电子技术的普及,采用电力电子驱动器驱动的伺服电机得到了大力的发展。传统电机经过一定的改进,通过与电力电子驱动控制器连接,便可变成具有更多功能的伺服电机,使其具有更强的灵活性,具有更广泛的应用前景[1]。但与此同时也会带来一些其他问题,如损耗增加、效率降低、电磁干扰增大以及额外电磁噪声的增加。本文研究,某型电机在与电力电子驱动器连接后噪声明显升高,通过对电机噪声频谱的分析,寻找噪声源位置并优化电机结构,达到大幅降低电机噪声目的。
1 电机结构
本项目电机由电动机本体、位置传感器、传感器端盖及引出线插座等部件构成。电机的结构如图1所示。
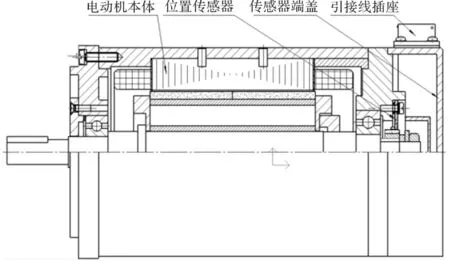
图1 电机结构图
2 噪声分析
在使用标准正弦波电源驱动电机运行时,电动机的噪声主要为低频机械噪音。取10台样机,按国标方法电机在额定转速下空载运行1m处测试噪音为35~38dB(A)。其噪声频谱如图2所示。

图2 正弦波电源驱动电机噪声频谱
当使用电力电子驱动器测试电机噪声时,发现电机噪声升高至45~55dB(A),较采用标准正弦波驱动时噪声增加10~15dB(A)。且每台电机的噪声一致性较差,具有较大的离散性。用噪声分析仪对电机的噪声进行分析得到电机的噪声频谱如图3所示。
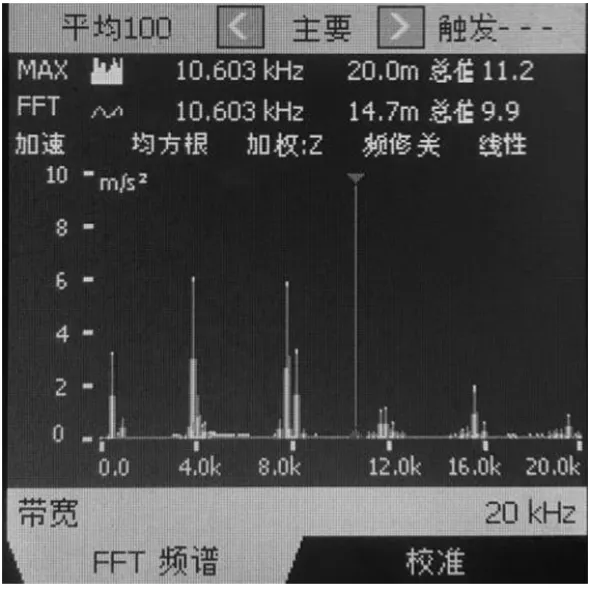
图3 电力电子驱动器驱动电机噪声频谱
可以看出电机噪声除了原有的低频噪声外还在4kHz、8kHz、12kHz、16kHz等特定频率附近增加了大量高频噪声。本项目使用的电力电子驱动器的斩波频率为4kHz,高频噪声频率为斩波频率和其倍频频率。可以初步判断电机噪声的增大与使用的电力电子驱动器相关。
电力电子驱动器是利用脉冲宽度调制技术(PWM)。PWM技术用一系列占空比大小不一的方波电压,去等效正弦波电压。这些方波电压会在电机侧产生出高频的谐波电流。随着载波频率升高谐波电流的幅值会减小,频率会升高。但采用PWM技术的电力电子驱动器受到电力电子元器件的限制,载波频率不可能很高,因此实际应用PWM技术的电力电子驱动器为非正弦输出,其中均含有大量的谐波电流[2]。
在使用电力电子驱动器的电机中必然存在大量的谐波电流,为了降低电机的电磁噪声,必须降低谐波电流产生的噪声。所有的噪声均由物体的振动产生,降低噪声即降低电机零件的振动[3]。电机的振动源是相同的,但每台电机的噪声不一样,证明电机的某些零件与载波频率和其倍频存在共振,共振将电磁噪声放大。
为了准确定位将电机的高频电磁噪声放大的零件,在电机运行时采用加速度测量仪对电机不同位置的自振动情况进行测量。通过对电机不同部位自振动的测量可以清楚测量出电机不同零件的共振情况。
电机绕组虽然是高频振动的激励源,但在对电机各部位自振动情况进行测试发现电机定子的高频自振动幅值很低,而电机尾部的传感器端盖高频振动却很大。如图4所示,初步判断为传感器后端盖产生了共振,对高频电磁振动起到放大的作用。
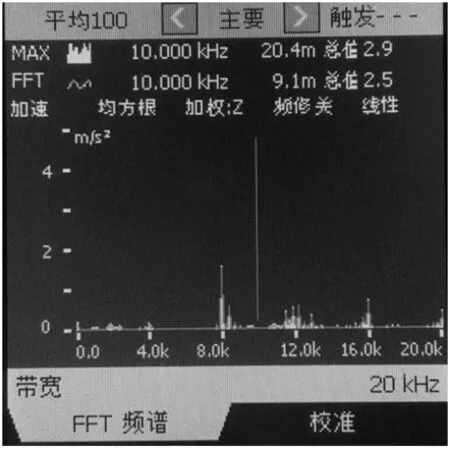
图4 优化前传感器后端盖振动频谱
本电机在不安装传感器后端盖情况下电机也可运行,于是拆除传感器后端盖,对电机噪音进行重新测试。电机噪音明显降低约10dB(A)。通过以上实验可以确定电机高频电磁噪音是被传感器后端盖放大。
3 改进方案
为了验证电机传感器后端盖对电磁噪音的放大作用,同时对重新优化设计提供理论依据,对电机传感器后端盖进行了有限元仿真建模,按照传感器后端盖安装方式计算其在预应力情况下的各阶固有频率。各阶固有频率如表1所示。可以看出,后端盖的一阶固有频率约为4.20kHz与电力电子驱动器的载波频率非常接近。因为零件加工有公差的存在,实际零件的固有频率会略有差异,所以就造成了每台电机的高频噪音存在差异。

表1 优化前传感器后端盖各阶固有频率
传感器后端盖各阶结构的变形分布情况如图5所示,为消除传感器后端盖与电流谐波共振产生的噪声,根据仿真结果对传感器后端盖进行了重新设计。电力电子驱动器载波频率为4kHz,测试方法为A计权,测试频率范围为0~20kHz。传感器后端盖各阶固有频率与载波频率及其整数倍在20kHz内不能产生共振。通过在局部增加厚度,提高刚度,提高零件的固有频率消除共振。经过重新设计,电机传感器后端盖结构如图6所示。经仿真计算,一阶固有频率为5.64kHz,各阶固有频率如表2所示,各阶的结构变形分布情况如图避开了电力电子驱动器载波频率为4kHz及其整数倍。

图5 传感器后端盖各阶结构变形分布

图6 传感器后端盖改进后结构

表2 优化后传感器后端盖各阶固有频率

图7 更改后传感器后端盖各阶结构变形分布
4 改进验证
根据重新设计加工传感器后端盖,经测试传感器后端盖的自振动明显减弱,如图8所示。重新按国标方法电机在额定转速空载1m处测试噪音为37~40dB(A)。通过测试噪声频谱图9发现,可以看出电机仍然存在4kHz、8kHz、12kHz、16kHz等高频电磁噪声。故采用电力电子驱动器驱动的电机,其绕组内电流为非正弦电流,存在大量额谐波电流。这些谐波电流会产生额外的振动,使电机会发出高频电磁噪音。由于高频电磁噪音与原电机内部的噪音相互叠加,所有电机整体的噪声会增加。
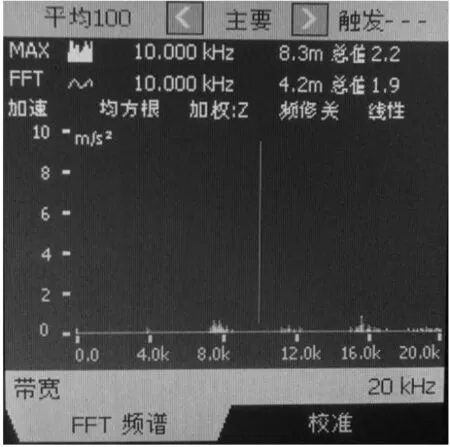
图8 优化后传感器后端盖振动频谱
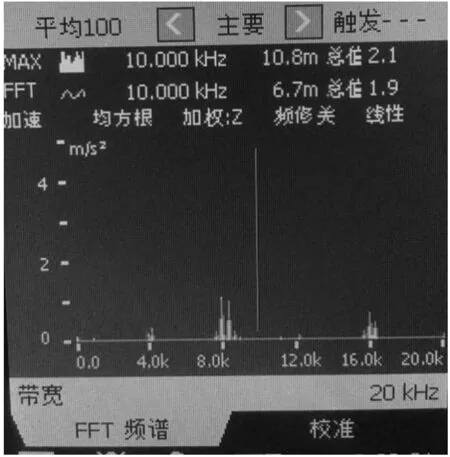
图9 优化后电力电子驱动器驱动电机振动频谱
5 结 论
采用电力电子非正弦驱动器驱动驱动的电机中会含有大量的谐波电流,这些谐波电流会在电机内部产生与斩波频率和其倍频的高频振动。这些高频振动容易与电机内部的小薄壁零件产生共振,使得高频噪音增大从而大幅增大电机噪音。
通过测量电机不同位置的自振动可以测量出产生共振的零件。通过对零件的优化设计,使零件的各阶固有频率远离斩波频率及其倍频,可明显减小电磁噪音。
采用电力电子非正弦驱动器驱动的电机噪声会产生由于谐波电流产生的高频电磁噪音。这个电磁噪音只能通过优化设计降低其幅值,但不能完全消除,所以采用电力电子非正弦驱动器驱动的电机噪声会增加。
