基于旋转上升式光路的小型光杠杆
2020-06-11顾倍康刘振鹏隗群梅尹教建
顾倍康,柳 铄,刘振鹏,隗群梅,尹教建
(中国石油大学(华东) 理学院,山东 青岛 266580)
静态拉伸法测量金属丝的杨氏模量是大学物理实验中重要的基础性项目. 其基本原理是利用光杠杆的放大原理将拉伸的微小量转化为标尺长度等宏观的测量. 该实验原理直观,方法巧妙,在仪器调整和数据处理方面具有代表性,被许多高校所采用[1-4]. 但是其不足也较为明显,主要集中在平面镜转角过大引起系统误差增大、实验仪器难以调节以及占地面积较大导致实验室空间利用系低等方面[5-9]. 很多实验者对光杠杆测量系统进行了改进[10-18],其中常用的方法是利用激光器代替望远镜以及利用多组平面镜增加光的反射次数. 采用平面镜组后,经过光的多次反射,虽然能够减小横向尺寸,但纵向尺寸也会增加.
基于上述现状,在分析传统光杠杆的放大原理不足的基础上,以Solidworks为设计和检验手段,确立了多次反射、旋转上升式立体光路. 利用3D打印技术,以激光器为光源,制作了可以直接安装在杨氏模量测量仪上的小型光杠杆装置.
1 光杠杆的基本原理
光杠杆测量微小长度变化量原理如图1所示[19]. 当光杠杆下降为ΔL时,可动平面镜M绕O转过角度θ,可动平面镜法线也将转过角度θ. 根据反射定律,反射光线转过2θ角度,在望远镜十字叉丝的位置可见标尺像的刻度值由n0变为n1,若M与标尺之间的距离为D,则有:
(1)
(2)
当θ很小时
(3)
式中Δn=n1-n0.
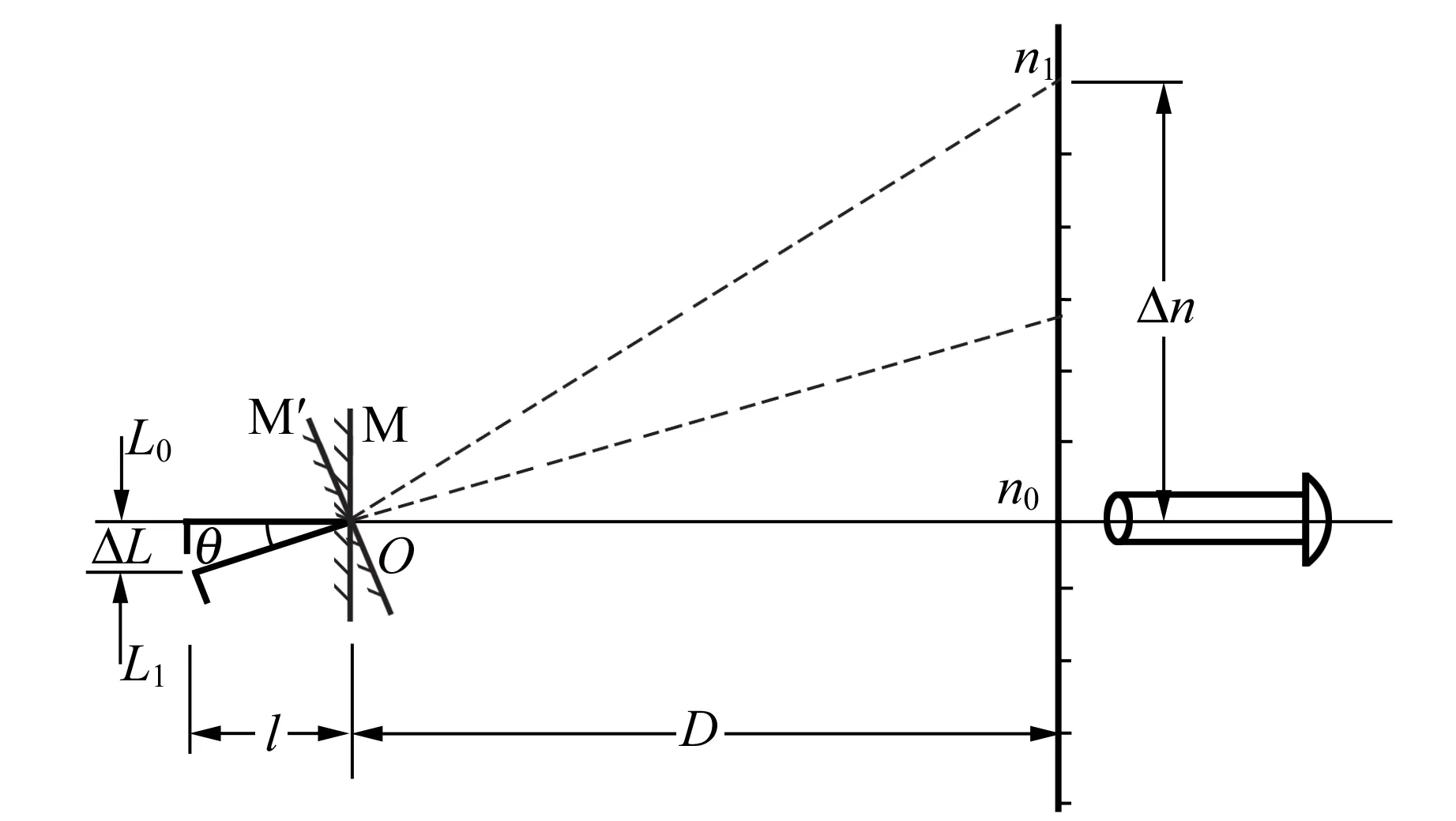
图1 光杠杆原理图
由图1可知,光杠杆光路中仅有1次反光,并且入射、反射光仅在竖直平面内移动. 要增大Δn只能增加可动平面镜与标尺之间的距离D,这是实验装置占地面积较大的原因.
2 多次反射、旋转上升式立体光路设计
如果用激光器代替望远镜,并在水平面内斜入射可动反射镜,增加多组竖直的平面镜,构造有多次反射的立体化光路,可使得光杠杆尺寸大大减小.
在水平面内边长为D的等边△ABC的3个顶点上竖直安装3块平面镜M1,M2和M3,每块平面镜与角平分线垂直,其俯视图如图2所示. 当有光从B点出发沿着BA照射平面镜M1时,经过平面镜M1和M3的反射,最终会回到B点,构成闭合的光路.

图2 3组竖直平面镜布置的俯视图
假设用平面镜的中线代替平面镜,如图3所示,在平面镜M1的下端放置有可动平面镜M,设后足下降为ΔL,可动平面镜M绕A点在角平分线OA平面内转过小角度θ,则光线经可动平面镜M反射后以2θ入射到平面镜M3,如图3(a)所示,光点在竖直方向的移动量为Δn1. 平面镜M3将光以2θ反射到平面镜M2,如图3(b)所示,光点在竖直方向的移动量为Δn2. 平面镜M2将光以2θ反射回平面镜M1,如图3(c)所示,完成1次旋转上升,如图3中红颜色的光线所示.

图3 旋转上升式立体光路图
此时,光点在竖直方向的移动量为Δn3,则
Δn1=Δn2=Δn3=Dtan (2θ),
(4)
相比较于动平面镜M未旋转的位置,光点在竖直方向的改变量为
Δn=3Δn1=3Dtan (2θ),
(5)
当有n次旋转上升时(图3中绿颜色的光线为第2次旋转上升示意图),则有
Δn′=3nDtan (2θ),
(6)
由于θ很小,将式(1)代入可得
(7)
3 小型光杠杆的设计与制作
基于上述光路图原理,利用Solidworks软件设计了立体光杠杆装置,如图4所示.
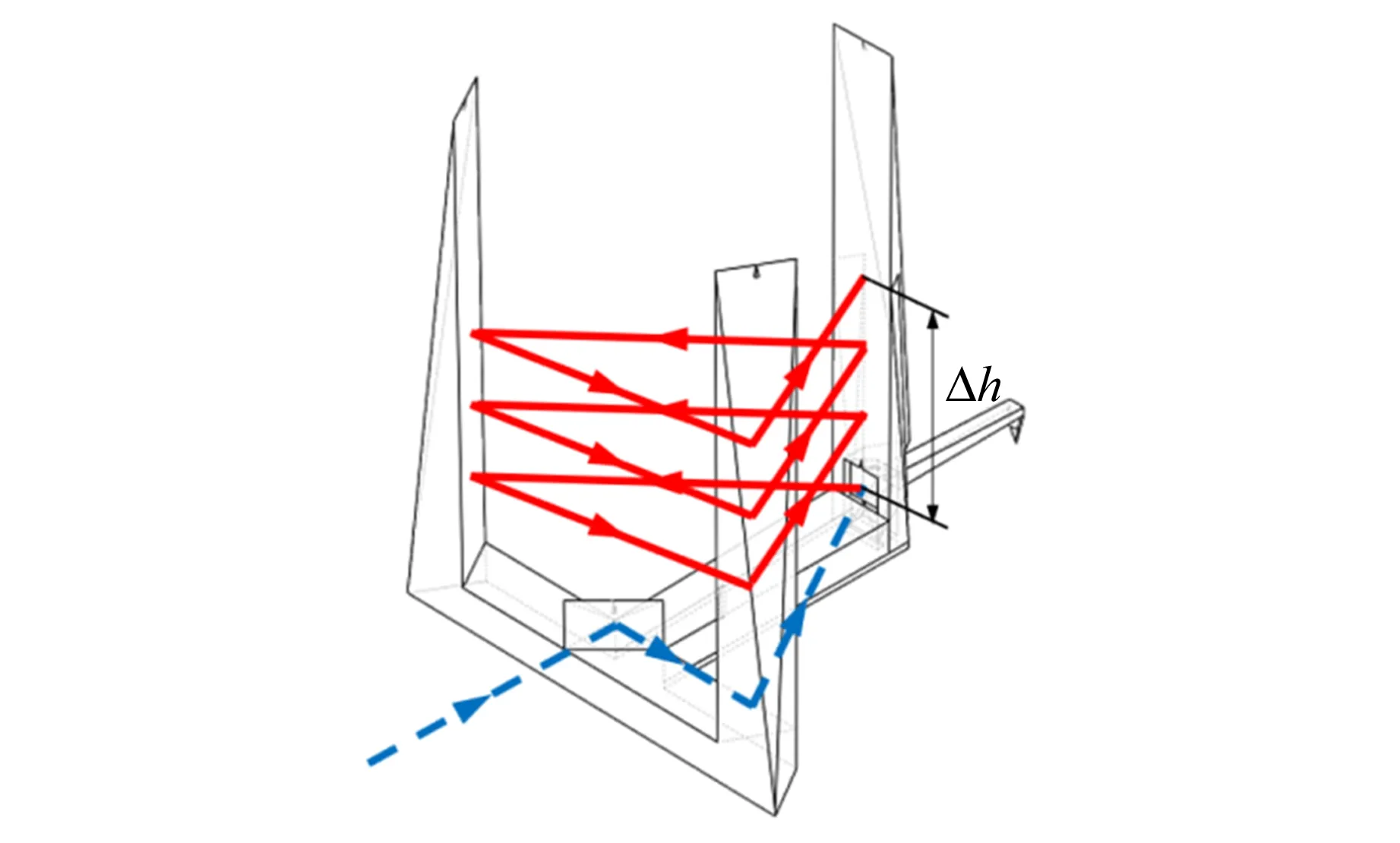
图4 基于Solidworks设计的立体光杠杆装置
由图4可知,在T字型底座上竖立2个棱柱,其内侧面用于粘贴条形平面镜,在1个棱柱下端开孔,放置带有反射镜的三足支架,上端中心线一侧竖直的贴有标尺,其正对的横梁上装有竖直放置的斜反射镜,当激光光束正对三足支架反射镜入射,经斜反射镜反射后进入与其相对棱柱平面镜,再经过反射后入射三足支架反射镜,入射光路如图4中虚线所示. 当三足支架反射镜后足下降时,可将反射光束会进行旋转上升式反射,有效光路如图4中实线所示.
有效光路在水平面上的投影如图5所示,距离D=100 mm. 三支点光杠杆反射镜支架设计如图6所示,其长度l为55 mm. 为了保证加工精度,图4中的光杠杆装置采用3D打印技术加工,加工完成后,贴上平面镜.
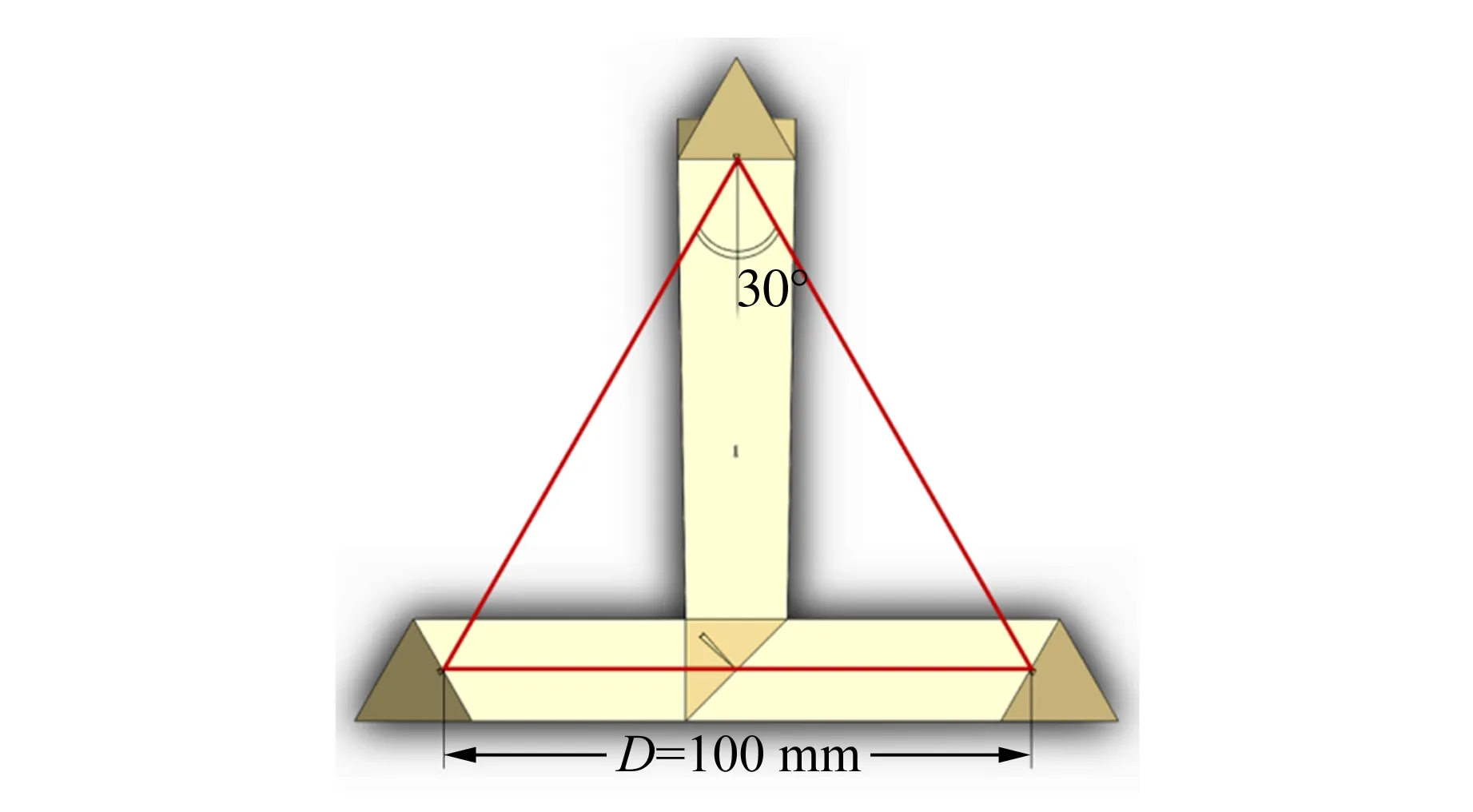
图5 有效光路在水平面上的投影

图6 三支点光杠杆反射镜支架设计图
设计的总装配图如图7所示,实际装置如图8所示. 3D打印的光杠杆装置、激光器以及激光器三维调节支架放置在台阶型钢板上,采用2块木工G字夹将钢板固定在杨氏模量测量平台上.

图7 光杠杆总装配图

图8 实际总装图
4 杨氏模量对比测量实验

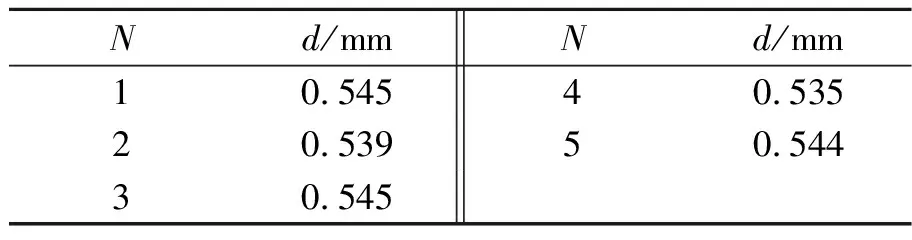
表1 钢丝直径d读数

表2 钢丝长度以及光杠杆参量
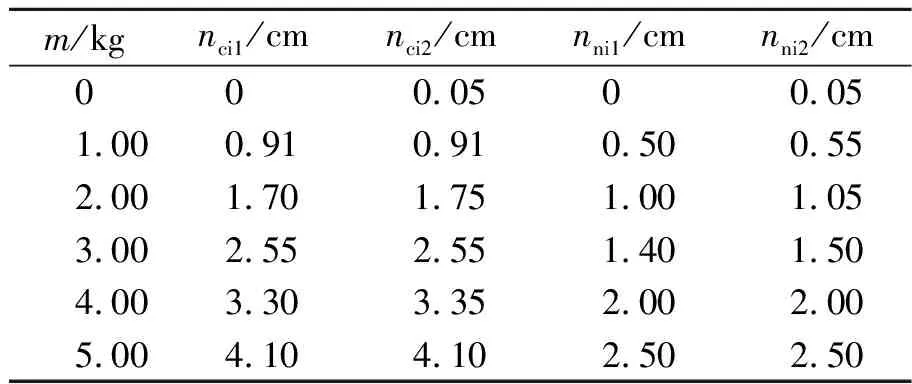
表3 传统光杠杆和改进光杠杆加减砝码测试结果
拉伸法杨氏模量测量E为[19]
(8)
将式(3)代入式(8)可得传统光杠杆杨氏模量测量结果为
将式(7)代入式(8)可得改进光杠杆杨氏模量测量结果为
两者之间的相对偏差为1.2%.
为了进一步说明2种光杠杆测量时的异同,根据表3绘制了加减砝码测量曲线,如图9所示. 图9表明,2种光杠杆在加减砝码过程中都有良好的重复性. 但相比较而言,改进光杠杆的重复性稍差,其原因可能是改进光杠杆需要更为精密的组装要求,安装时精度稍差造成的.
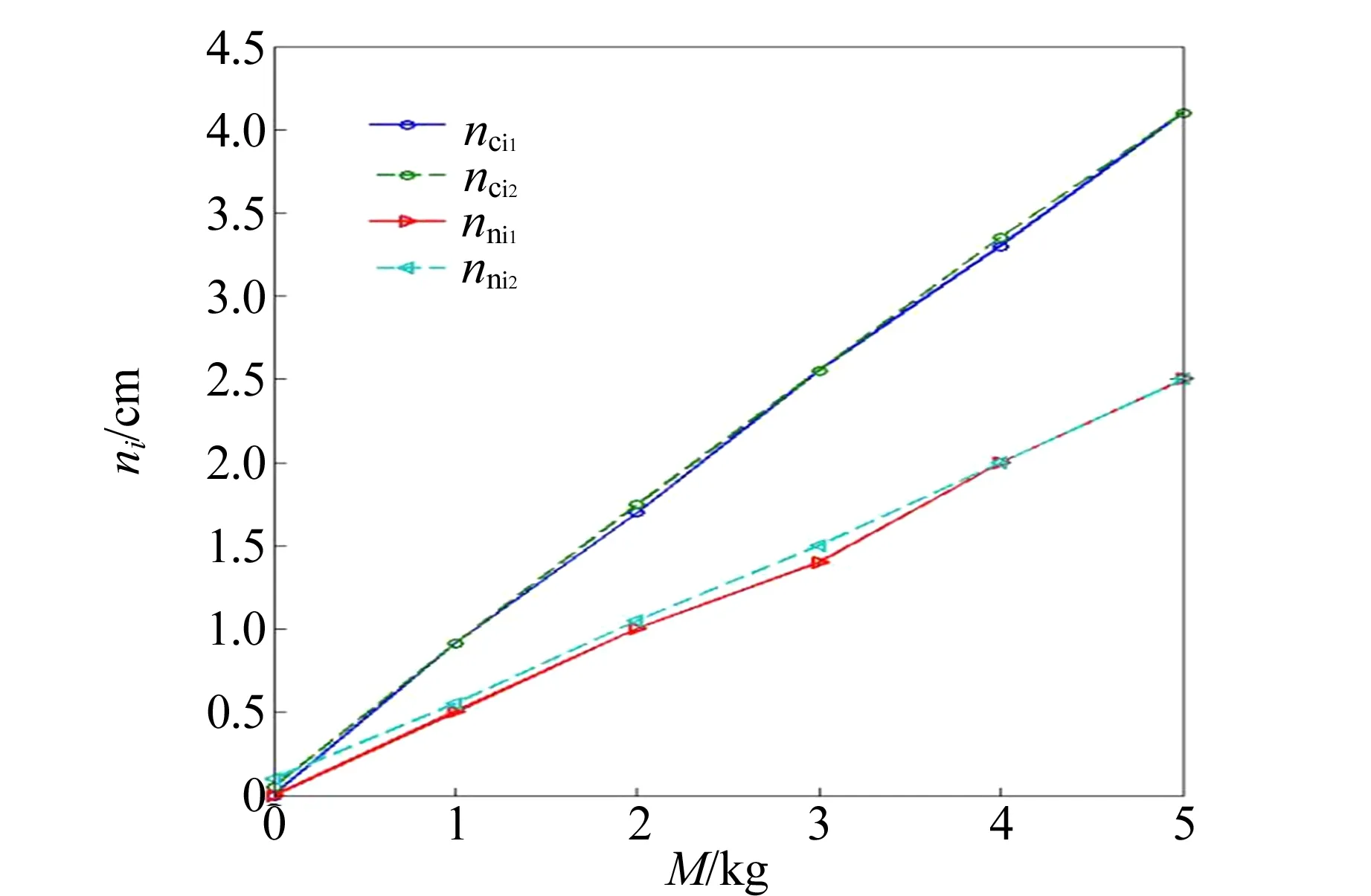
图9 2种不同光杠杆加减砝码的测试数据
5 结束语
分析了传统光杠杆的放大原理,指出了其空间利用率较低的原因,设计了在三棱柱平面镜间多次反射、旋转上升式的立体光路,基于 Solidworks设计了立体光杠杆装置,并利用3D打印技术进行了加工,以激光器为光源,制作了可以直接安装在杨氏模量测量仪支架上的小型光杠杆装置. 与传统的光杠杆装置对同一钢丝的杨氏模量对比测量结果表明,小型光杠杆装置加减砝码的读数具有较好的重复性,具有相同的测量精度.
