四点球头反射镜支撑设计与分析
2019-01-07张楠庞寿成常君磊张凤芹李庆林
张楠 庞寿成 常君磊 张凤芹 李庆林
四点球头反射镜支撑设计与分析
张楠1,2庞寿成1常君磊1张凤芹1李庆林1
(1 北京空间机电研究所,北京 100094)(2 先进光学遥感技术北京市重点实验室,北京 100094)
反射镜的支撑一直都是空间遥感相机的关键技术之一。为了能够获得较高的反射镜面形精度,文章针对离轴三反空间遥感相机,提出了一种四点球头反射镜的支撑方式。首先,在反射镜结构设计的基础上,介绍了四点球头反射镜支撑方式的原理以及支撑结构的组成;之后,对整个反射镜支撑结构中最重要的球头和支杆部分进行了详细设计;最后,使用Patran进行有限元模型前处理,使用Nastran求解,对反射镜组件的结构模态和各个工况下的反射镜面形精度进行仿真分析,得到的反射镜面形精度为1.642 5nm,优于光学系统的指标要求。结果表明使用四点球头支撑方式的反射镜组件在保持较高刚度的基础上,能够获得较高的面形精度,证明了这种适用于长条型反射镜的支撑方式合理可行。
反射镜 四点球头支撑 面形精度 有限元分析 空间相机
0 引言
近年来,空间对地观测遥感技术发展迅速,其中离轴三反空间相机已经成为重要的空间探测光学仪器[1-2]。反射镜组件是离轴三反空间相机的核心组件之一,反射镜的面形精度直接影响着相机的成像品质[3-4]。离轴三反光学系统由3个反射镜组成,其中主镜和三镜一般为长条形,与同轴相机相比,反射镜的通光口径相对较大[5]。反射镜组件从研制到在轨使用的过程中,要能经受住装调、力学试验、热试验、长途运输、发射和在轨运行的复杂环境的考核[6-7]。因此,为大口径反射镜设计稳定的支撑结构,保证反射镜具有良好的环境适应能力,以获得较高的面形精度[8],就成了空间遥感相机光机结构设计里重要的一环。
目前较为常见的反射镜支撑技术主要分为装框式支撑和点式支撑。装框式支撑较为成熟,主要适用于小口径反射镜的支撑[9]。点式支撑又可分为中心支撑、侧面支撑和复合支撑[10]。对于口径较大的反射镜,单一的支撑方式已不能满足使用的需求,因此以Bipod支撑和多点球铰支撑[11-12]为代表的复合支撑方式得到越来越多的应用。增加支撑点数一方面会使得反射镜的重力分配更加均匀,有利于获得较高的面形精度;另一方面,复杂的支撑方式也会带来定位和装配困难的问题[13],通常需要额外增加柔性或卸载单元[14],给工程实现造成了麻烦,也会降低支撑的可靠性。在本文中介绍了一种四点球头的反射镜支撑方式,从支撑原理上实现对反射镜稳定支撑的同时,使得反射镜组件在无须增加柔性或者卸载单元的情况下,具有良好的力、热卸载能力,且易于装配,能够获得较高的反射镜面形精度。与此同时,由于支撑结构均为金属材料,没有使用胶粘的方式来固定反射镜,也避免了粘结剂的不稳定性对反射镜面形精度的影响。
1 反射镜结构设计
(1)设计指标、口径尺寸及选材
本文所选的某离轴三反空间遥感相机的非球面反射镜的有效通光口径为490mm×220mm,面形精度变化峰谷(PV)值≤0.16、均方根(RMS)值≤/40(为波长,=632.8nm)。考虑反射镜的加工工艺和尺寸公差,并结合以往此类相机装调经验预留了一定的装调余量,最终将反射镜通光口径确定为:505mm×235mm。
反射镜的稳定性与材料有直接的关系,在保证反射镜较高刚度的基础上,要尽量降低反射镜的质量以减少发射成本,因此要求反射镜的材料具有较高的比刚度;此外,为了避免温度变化对反射镜面形精度的影响,反射镜的材料要求具有高导热率和低线性膨胀系数的热物理性能[15]。
综合材料的力学性能、热物理性能、可加工成性和周期成本因素等,最终使用微晶玻璃(Zerodur)作为文中的反射镜材料。
(2)径厚比的选择及轻量化方式
反射镜的径厚比会影响轻量化的程度,与材料的比刚度、密度和镜面的变形有关。目前尚没有针对长条形反射镜径厚比的经验公式,可先依照文献[16]提到的圆形反射镜的经验公式进行计算

式中为限定的镜面变形量;为反射镜半径;为反射镜直径;为材料密度;为反射镜厚度;为弹性模量;n为地球重力加速度。
当反射镜满足设计指标要求,即≤101.248nm时,本反射镜的理论最大径厚比为11︰1,结合同类反射镜的研制经验,最终选择8︰1作为本反射镜的径厚比,故初步确定反射镜的厚度为65mm。
在反射镜结构设计中,轻量化技术已经成为一种减轻反射镜质量的必要手段,它是应用结构承力的特性,去除反射镜非成像表面对结构刚度影响较小的那部分体积,达到减轻质量的同时依然保持较高刚度的目的。
反射镜轻量化的结构形式与反射镜的形状尺寸、光学加工难度、支撑结构的连接形式都有关系。对于轻量化设计考虑了三角形孔、圆形孔、圆形阶梯孔、蜂窝孔等形式[17]。通过分析比较发现,对本反射镜采用三角形孔的轻量化形式,轻量化率最高,可达72%,但基频仅有1 120Hz;采用圆形孔的轻量化形式反射镜的基频最高,为1 850Hz,但轻量化率仅有53%。最终结合加工难度和相机质量限制等因素,采用三角孔圆形孔复合的轻量化方式,反射镜质量最终为8.2kg,轻量化率达60.5%,反射镜的基频达到1 520Hz,表明进行轻量化后仍具有较高的刚度。
2 反射镜支撑设计
2.1 支撑原理
四点球头支撑包括中心球头支撑、侧面球头支撑、上球头支撑和下球头支撑。按照运动学原理实现了对反射镜6个自由度的约束。中心球头支撑位于反射镜的中心,从反射镜的背面插入起到支撑作用,其余球头支撑均从反射镜的侧面插入起到支撑作用。中心球头支撑球头结构的圆心与反射镜的质心重合,其轴线与光轴平行,实现对反射镜长轴方向和短轴方向平动的约束;侧面球头支撑的轴线与中心球头支撑的轴线相垂直且通过反射镜的质心,实现对反射镜短轴方向和光轴方向平动的约束;而上球头支撑和下球头支撑位于侧面球头支撑的另外一侧,上球头支撑和下球头支撑的轴线重合,并与中心球头支撑、侧面球头支撑的轴线均垂直。上、下球头支撑以反射镜的长轴为对称轴对称放置,仅约束沿反射镜光轴方向的平动。反射镜镜组件结构如图1所示。
中心球头支撑、侧面球头支撑、上球头支撑、下球头支撑均使用带球头结构的球头支杆进行支撑,球头支杆的法兰部分与镜框固定在一起。在反射镜背部和侧面与球头支撑对应的位置设计有安装孔,在每个安装孔内装配有反射镜套筒,球头支杆的球头部分就装配到反射镜套筒内,球头支撑结构如图2所示,每个球头支撑对于自由度的约束就是通过反射镜套筒的结构限位来实现的。由于是球头部分与反射镜套筒之间是线接触,所以允许球头支杆的轴线和反射镜套筒的轴线产生一定的夹角,使得每个球头支撑具有自适应的能力,这样可以消除装配和零件加工误差而带来的应力,并且能够对重力等载荷进行卸载,使得这种支撑形式具有良好的稳定性。

图1 反射镜组件构型

图2 球头支撑结构
反射镜套筒与反射镜背面和侧面的安装孔均是面接触,因此反射镜套筒应选用线性膨胀系数与微晶材料相近的殷钢作为原材料,这样可以减小因温升而导致的热变形对反射镜面形精度的影响。球头支杆选用硬度高、耐磨性好、具有较高接触疲劳强度的轴承钢,以满足支撑结构对于强度和刚度的要求。虽然轴承钢与殷钢的线性膨胀系数差距较大,但是由于球头支杆的球头结构和反射镜套筒的接触面积极小,最大限度较低了温度变化对反射镜面形精度的影响。
2.2 球头支撑设计
2.2.1 球头直径
当反射镜处于光轴方向与大地垂直的水平静态时,中心球头支撑不受力,仅由侧面球头支撑、上球头支撑和下球头支撑来承受反射镜水平放置时的反射镜重力,0、1、2、3分别是中心球头支撑、侧面球头支撑、上球头支撑和下球头支撑的球头结构圆心位置,支撑结构的相互位置关系如图3所示。

图3 支撑结构的互位置关系
此时反射镜按照受力平衡关系可表示为

式中1,2,3分别为水平静态时侧面球头支撑、上球头支撑和下球头支撑所提供的支撑力;是反射镜的质量;为侧面球头支撑的球头圆心位置到反射镜中心的距离;为上、下球头支撑的球头圆心位置到反射镜中心的距离。当=130.5mm、=221.5mm时,计算得到1、2、3分别为30.4N,25.8N和25.8N。
当反射镜处于光轴方向与大地水平的垂直静态时,仅中心球头支撑承受反射镜镜面垂直放置时的反射镜重力,故中心球头支撑所提供的支撑力0为82.0N。
在各种力学环境下,每个球头支撑的球头部分承受挤压应力。在接触面上挤压应力的大小按半球面分布,最大挤压应力max发生在接触面中心,与球头半径和球头支撑所提供的支撑力有如下关系

式中1和γ2分别是相互挤压材料的泊松比;1和2分别是相互挤压材料的弹性模量。


当分别等于0、1、2、3时,要求每个球头受到的最大挤压应力小于最大许用挤压应力,并结合反射镜的厚度及球头支撑的结构特点,最终确定中心支撑、侧面球头支撑、上球头支撑、下球头支撑的球头直径分别为62mm、37mm、34mm和34mm。
2.2.2 球头支杆
球头支杆的主要作用就是保证球头能够稳定支撑反射镜,并且能够经受住鉴定级20n加速度过载的考核。球头支杆的装配关系如图4所示,球头支杆的直径和支杆长度是关键参数。
静态时,将球头支杆简化成梁,在其根部固支。梁的最大弯曲应力max发生在根部边缘,可表示为

最大剪应力max发生在支杆各截面的中性轴上,可表示为

球头接触点的静位移*可表示为

式中为球头支杆的惯性矩。
在满足每个球头支杆所受的max和max均不大于所选材料的最大许用应力,且*小于光学系统给出的反射镜平移的灵敏度公差时,结合球头直径、反射镜及镜框的尺寸、反射镜套筒的安装位置,通过多次迭代优化,最终得到满足使用要求的各球头支杆长度和直径,如表1所示。
表1 各支杆长度和直径参数
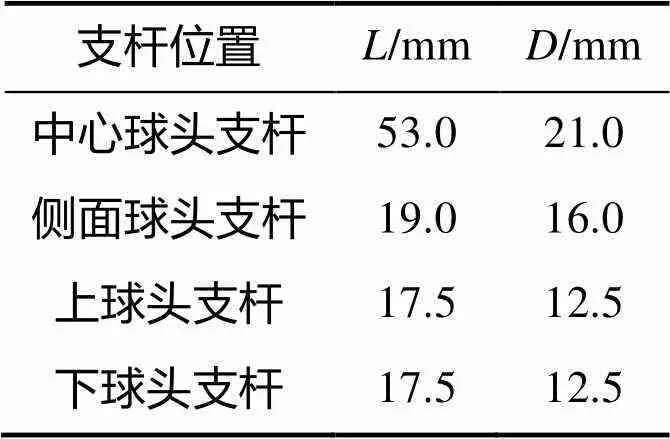
Tab.1 Length and diameter parameters of ball bearing bar
3 有限元分析
由于支撑结构是连接反射镜和相机主框架的过渡部分,因此会受到各种条件的约束[18]。在设计时,要针对不同的约束进行分析,主要包括:1)模态分析。组件应能承受发射时的过载要求,不能损坏反射镜,因此要求反射镜组件具有较高的基频。2)自重分析。反射镜组件最终是在太空微重力的环境下使用,而在地面装调时必定会受到重力的影响[19-20],因此要保证在重力的条件下反射镜面形精度满足使用要求。3)温升分析。尽管采取了热隔离、热均匀、主动加热或致冷等综合热控措施,但反射镜组件的温度也会在一定范围内发生波动,从而产生热应力,这就要求支撑部分具有热应力的卸载能力[21]。4)强迫位移分析。反射镜组件与相机主框架一般是面接触,由于结构件加工误差,支撑结构与相机主框架的安装面相对于理想平面存在一定变动量,当对安装面施加螺钉预紧力时,安装面相当于产生了一定的强迫位移,这种强迫位移带来的装配应力对面形精度的影响也要满足使用要求。
3.1 模态分析
约束施加在镜框与相机主框架的三处安装面,反射镜组件的前四阶模态分析结果见表2所示,表明使用四点球头支撑技术的反射镜组件具有较高的刚度。
表2 反射镜组件模态分析结果

Tab.2 Results of the modal analysis of the mirror assembly Hz
3.2 重力分析
重力分析是组件在向(反射镜短轴方向)、向(反射镜长轴方向)两个检测方向上施加1n静过载,分析结果见表3所示。分析结果表明在检测方向上重力载荷作用下的面形精度满足要求,反射镜组件具有良好的重力卸载能力。并且在向检测时受重力的影响较小,更有利于反射镜的装调。
表3 反射镜组件重力分析结果

Tab.3 Results of the gravity analysis of the mirror assembly
表4 反射镜组件温升分析结果

Tab.4 Results of the temperature rise analysis of the mirror assembly
3.3 温升分析
温升分析有两种工况,工况1是约束镜框与主框架的三个安装面,工况2是组件的自由膨胀。反射镜组件在20℃的基础上均匀温升2℃,其结果如表4所示。结果表明反射镜面形精度受温度变化的影响较小,具有良好的热应力卸载能力。
3.4 强迫位移分析
分别在反射镜组件与主框架连接的三个安装面上施加0.01mm的强迫位移,分析这种强迫位移对反射镜面形精度的影响。对安装面1、安装面2和安装面3分别施加强迫位移后,反射镜面形精度仍然满足要求,分析结果如表5所示。表明反射镜组件具有良好的应力卸载能力。另外,从分析结果看,应尽量避免或减少对安装面2施加强迫位移,这样更有利于获得较高的面形精度。
表5 反射镜组件强迫位移分析结果

Tab.5 Results of the enforced displacement analysis of the mirror assembly
从上述仿真分析中可以看出使用四点球头反射镜支撑技术,可以获得较高基频的反射镜组件,具有较高的刚度和强度;在检测方向上,反射镜的面形精度受重力影响较小,均方根值仅为光学指标要求的8.7%;均匀温升2℃时,均方根值仅为光学指标要求的10.4%,表明具有良好的热稳定性;分别在三个反射镜组件安装面上施加强迫位移,均方根值仅为光学指标要求的5.8%,分析结果表明使用四点球头支撑方式的反射镜组件具有良好的环境适应能力。
4 结束语
四点球头反射镜支撑形式,与其它支撑形式相比,从原理上可以实现对应力的卸载,无须增加复杂的柔性卸载单元,也不会受到粘结剂不稳定性的影响,在获得较高面形精度的同时,提高了可靠性。本文从材料的选择、轻量化设计和支撑原理入手,对四点球头支撑反射镜进行了详细设计,并利用有限元软件进行仿真分析。分析结果显示,反射镜组件的一阶模态频率为293.2Hz,具有较高刚度和强度;与此同时,针对反射镜各种面形精度分析的结果都优于/40 的光学指标要求,最大的均方根值仅为指标要求的10.4%,表明使用该支撑形式的反射镜具有较好的环境适应能力,可以为同类反射镜的支撑设计提供参考依据。
[1] 张科科, 阮宁娟, 傅丹鹰. 国外空间用三反离轴相机发展分析与思考[J]. 航天返回与遥感, 2008, 29(3): 63-70. ZHANG Keke, RUAN Ningjuan, FU Danying. Analysis and Consideration of Development of Overseas Space Off-axis TMA System Camera[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(3): 63-70. (in Chinese)
[2] 范斌, 蔡伟军, 张孝弘, 等. “资源三号”卫星多光谱相机技术[J]. 航天返回与遥感, 2012, 33(3): 75-82. FAN Bin, CAI Weijun, ZHANG Xiaohong, et al. Technology of the Multi-spectral Camera of ZY-3 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2013, 33(3): 75-82. (in Chinese)
[3] 常军, 翁志成, 姜会林, 等. 宽覆盖、离轴空间相机光学系统的设计[J]. 光学精密工程, 2003, 11(1): 55-57. CHANG Jun, WENG Zhicheng, JIANG Huilin, et al. Design of Optical System for Space Camera with Long Focal Length, with Coverage and High Resolution[J]. Optics and Precision Engineering, 2003, 11(1): 55-57. (in Chinese)
[4] 钟兴, 金光, 王栋, 等. 共轴TMA反射镜面形不规则对波前误差的影响[J]. 光学精密工程, 2008, 16(8): 1516-1521. ZHONG Xing, JIN Guang, WANG Dong, et al. Influence of Surface Irregularity of On-axis TMA Mirror on Wave-front Error[J]. Optics and Precision Engineering, 2008, 16(8): 1516-1521. (in Chinese)
[5] 沙巍, 陈长征, 许艳军, 等. 离轴三反空间相机主三镜共基准一体化结构[J]. 光学精密工程, 2015, 23(6): 1612-1619. SHA Wei, CHEN Changzheng, XU Yanjun, et al. Integrated Primary and Tertiary Mirror Components from Common Base Line of off-axis TMA Space Camera[J]. Optics and Precision Engineering, 2015, 23(6): 1612-1619. (in Chinese)
[6] 辛宏伟, 关英俊, 李景林, 等. 大孔径长条反射镜支撑结构的设计[J]. 光学精密工程, 2011, 19(7): 1560-1568. XIN Hongwei, GUAN Yingjun, LI Jinglin, et al. Design of Support for Large Aperture Rectangular Mirror[J]. Optics and Precision Engineering, 2011, 19(7): 1560-1568. (in Chinese)
[7] 任建岳, 陈长征, 何斌. SiC和SiC/Al在TMA空间遥感器中的应用[J]. 光学精密工程, 2008, 16(12): 2537-2543. REN Jianyue, CHEN Changzheng, HE Bin. Application of SiC and SiC/Al to TMA Optical Remote Sensor[J]. Optics and Precision Engineering, 2008, 16(12): 2537-2543. (in Chinese)
[8] 郭疆, 何欣. 大口径空间遥感相机主反射镜支撑设计[J]. 光学精密工程, 2008, 16(9): 1642-1647. GUO Jiang, HE Xin. Design of Support for Primary Mirror of Space Remote Sensing Camera[J]. Optics and Precision Engineering, 2008, 16(9): 1642-1647. (in Chinese)
[9] 王跃, 李世其, 张锦龙, 等. 地球静止轨道遥感相机一体化设计[J]. 航天返回与遥感, 2016, 37(4): 40-48. WANG Yue, LI Shiqi, ZHANG Jinlong, et al. Integrated Design Analysis of Remote Sensing Camera on Geostationary Earth Orbit Satellite[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(4): 40-48. (in Chinese)
[10] 刘福贺, 程志峰, 石磊, 等.长条形反射镜支撑结构设计与分析[J]. 红外与激光工程, 2015, 44(5): 1512-1517. LIU Fuhe, CHENG Zhifeng, SHI Lei, et al. Design and Analysis of Supporting Structure for Rectangular Mirror[J]. Infrared and Laser Engineering, 2015, 44(5): 1512-1517. (in Chinese)
[11] 宫辉, 陈伟, 周峰. 大口径反射镜组件发射阶段环境的防振设计[J]. 航天返回与遥感, 2015, 36(3): 40-47. GONG Hui, CHEN Wei, ZHOU Feng. The Vibration Suppression Designing for Large Aperture Mirror Assembly in Launch Environment[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(3): 40-47. (in Chinese)
[12] 闫勇, 贾继强, 金光. 新型轻质大口径空间反射镜支撑技术[J]. 光学精密工程, 2008, 16(8): 1533-1539. YANG Yong, JIA Jiqiang, JIN Guang. Design of New Type Spaceborne Lightweighted Primary Mirror Support[J]. Optics and Precision Engineering, 2008, 16(8): 1533-1539. (in Chinese)
[13] 李志来, 徐宏. 长条形空间反射镜及其支撑结构设计[J]. 光学精密工程, 2011, 19(5): 1039-1047. LI Zhilai, XU Hong. Design of Rectangular Space Mirror and Its Support Structure[J]. Optics and Precision Engineering, 2011, 19(5): 1039-1047. (in Chinese)
[14] 崔永鹏, 何欣, 张凯. 采用三点定位原理的反射镜支撑结构设计[J]. 光学仪器, 2012, 34(6): 56-61. CUI Yongpeng, HE Xin, ZHANG Kai. The Support Design of Reflected Mirror from the Principle of Three Points Supported[J]. Optical Instruments, 2012, 34(6): 56-61. (in Chinese)
[15] 王诚, 韩建忠, 李江勇. 一种新型轻量化扫描反射镜设计[J]. 激光与红外, 2012, 42(11): 1268-1272. WANG Cheng, HAN Jianzhong, LI Jiangyong. Design of a New Type Lightweight Scan Mirror[J]. Laser & Infrared, 2012, 42(11): 1268-1272. (in Chinese)
[16] 徐宏, 关英俊. 空间相机1m口径反射镜组件结构设计[J]. 光学精密工程, 2013, 21(6): 1488-1495. XU Hong, GUAN Yingjun. Structural Design of 1m Diameter Space Mirror Component of Space Camera[J]. Optics and Precision Engineering, 2013, 21(6): 1488-1495. (in Chinese)
[17] 罗廷云, 张凤芹, 范斌. 大长细比反射镜侧面支撑结构设计与分析[J]. 航天返回与遥感, 2013, 34(4): 66-71. LUO Tingyun, ZHANG Fengqin, FAN Bin. Design and Analysis of Side Support for Large Aspect Ratio Mirror[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(4): 66-71. (in Chinese)
[18] 曾勇强, 傅丹膺, 孙纪文, 等. 空间遥感器大口径反射镜支撑结构型式综述[J]. 航天返回与遥感, 2006, 27(2): 18-22. ZENG Yongqiang, FU Danying, SUN Jiwen, et al. Summary of Support Structure Patterns of Large Mirror for Space Remote Sensor[J]. Spacecraft Recovery & Remote Sensing, 2006, 27(2): 18-22. (in Chinese)
[19] 朱俊青, 沙巍, 陈长征, 等. 空间长条形反射镜背部三支撑点的设置[J]. 光学精密工程, 2015, 23(9): 2562-2569. ZHU Junqing, SHA Wei, CHEN Changzheng, et al. Position Layout of Rear Three Point Mounting for Space Rectangle Mirror[J]. Optics and Precision Engineering, 2015, 23(9): 2562-2569. (in Chinese)
[20] 杨亮, 李朝辉, 乔克. 某空间反射镜支撑装调技术[J]. 红外与激光工程, 2013, 42(12): 3277-3282. YANG Liang, LI Zhaohui, QIAO Ke. Support Structure and Assembling Technique of A Space Mirror[J]. Infrared and Laser Engineering, 2013, 42(12): 3277-3282. (in Chinese)
[21] 刘巨, 董得义, 辛宏伟, 等. 大口径反射镜组件的温度适应性[J]. 光学精密工程, 2013, 21(12): 3169-3175. LIU Ju, DONG Deyi, XIN Hongwei, et al. Temperature Adaptation of Large Aperture Mirror Assembly[J]. Optics and Precision Engineering, 2013, 21(12): 3169-3175. (in Chinese)
Design and Analysis of Four-point Spherical Support for Mirror
ZHANG Nan1,2PANG Shoucheng1CHANG Junlei1ZHANG Fengqin1LI Qinglin1
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 Beijing Key Laboratory of Advanced Optical Remote Sensing Technology, Beijing 100094, China)
The support of mirror is always one of the key technologies for space remote sensing camera. In order to obtain higher mirror surface accuracy, this paper proposes a four-point spherical support method for the TMA space camera. Firstly, based on the design of the mirror structure, the paper introduces the principle of the four-point spherical support and the composition of the support structure. After that, as the most important parts in the mirror support structure, the spherical support and strut are designed in detail. Finally, using MSC/Pantran/Nastran for finite element model pre-processing and solving, the structural modal of the mirror assembly and the mirror surface accuracy under various operational conditions are simulated and analyzed, and the mirror surface accuracy is 1.642 5nm rms, which is superior to the requirements of the optical system. The results show that the mirror assembly using the four-point spherical support can obtain higher surface accuracy on the basis of maintaining high stiffness, which proves that the support method suitable for the strip mirror is reasonable and feasible.
mirror; four-point spherical support; surface accuracy; finite element analysis; space camera
V447+.1
A
1009-8518(2018)06-0064-08
10.3969/j.issn.1009-8518.2018.06.008
2018-09-23
国家重大科技专项工程
张楠,男,1981年生,2011年获北京交通大学机械设计专业硕士学位,工程师。主要研究方向是空间遥感器光机结构设计。E-mail:zhand508@163.com。
(编辑:王丽霞)
