基于卡尔曼滤波的层析四维水汽分布研究
2020-06-02薛建华曹海洋张鹏飞
薛建华,曹海洋,张鹏飞
(1.山西大同大学建筑与测绘工程学院,山西大同 037003;2.开封市规划勘测设计研究院,河南开封 475004;3.中国科学院国家授时中心,陕西西安 710600;4.中国科学院时间频率基准重点实验室,陕西西安 710600)
随着地基GPS 斜路径水汽SWV 研究的不断深入,利用地基GPS网的斜路径湿延迟基于层析技术为获取水汽空间分布提供了新的契机,不但可以获得高精度、高分辨率的大气可降水量,而且可以获得具有高精度的三维空间分布,使之成为传统大气探测手段的有力补充。
国内外学者对水汽层析算法开展了广泛的研究[1-5],论证了利用地基GPS监测网层析水汽空间分布的可行性。本文系统介绍了基于卡尔曼滤波的层析水汽算法,并依据其获得四维产品分析暴雨期间的水汽变化特征,为水汽四维产品的实际应用提供一定借鉴。
1 地基GPS层析水汽基本原理
地基GPS层析水汽的主要思想是将GPS斜路径延迟作为输入值,利用一定的层析算法,最终得到空间水汽的三维分布。当GPS卫星发射的无线电信号穿过对流层时,由于对流层中湿空气折射的影响而产生一定的延迟,该延迟可以表示为如下形式:

式中:n为湿折射率;l为GPS信号斜路径长度。
在实际层析中,通常将所研究区域上空划分为三维立体网格,将积分路径离散化,见图1。

图1 地基GPS层析水汽格网模型
假设在一定的时间段内每个网格的湿折射率是一个未知常数xi,j,k,i,j,k分别表示第i层第j行第k列,若某个卫星信号p穿过该网格的长度为则离散化的湿延迟SWDp可表示为:

在一定的观测时段内,穿过每个立体格网的斜路径观测值就会有多条,进一步可以构成层析水汽的观测方程组,即:
式中:Hs为系数矩阵;X为每个立体格网的湿折射率构成的列矩阵;es为观测误差。
2 基于卡尔曼滤波的层析算法
基于卡尔曼滤波的层析水汽算法的基本思想是:将对流层湿延迟作为输入量,形成式(3)的方程,并将其作为卡尔曼滤波的观测方程,然后依据区域地基GPS 网所划分的格网参数向量的时空变化建立状态方程,最后利用卡尔曼滤波算法求解每个格网状态参数。
假设在短时间内各立体网格的湿折射度符合高斯-马尔科夫的随机游走平稳过程(状态转移矩阵Φk=I),则有状态方程为:

式中:wk为状态噪声;Xk为k时刻的湿折射度状态向量。
在本文中,假设每个立体格网的状态噪声wk和观测噪声ek期望为零,其方差分别为Qk和Rk的高斯白噪声序列。由图2可以看出,卡尔曼滤波的递推过程中,首先要确定状态参数Xk的初值和初始方差。根据前人的研究,通常情况下初始方差阵取状态噪声Qk在初始时刻的方差阵Q0,状态参数的初值也可取为所以问题的关键在于确定状态噪声Qk的方差。
首先可以根据划分的三维立体格网空间上的关系,同时考虑到大气分布的整体性以及随时间的运动型,建立三维格网之间的相关函数为:

式中:L=3×106m,取自经验系数;R3d为同一时刻两点距离;R4d为不同时刻两点距离,可以有下式确定:

式中:hi和hj分别为网格的高度;C0为权系数,通常取C0=100;Vw为气块格网的运动速度;T为时间间隔。

因此,通过上述的算法,将可以按照图2 给出的滤波递推流程进行空间湿折射度的计算[7]。
3 层析算法验证
为了验证上述算法的有效性,本文选取了西安地区GPS 气象服务网络进行算例分析。该网络共有7 个站,同时选用2011 年8 月5 日西安地区高精度的探空资料,距离地面每隔1 km反演一次大气水汽量,最终获取水汽随高度分布的廓线。与此同时,利用相应时间段西安地区GPS气象服务网络的数据,基于卡尔曼滤波的层析算法进行计算,获取每个高度层平均水汽含量。鉴于10 km以上水汽含量已经接近零值,所以文中仅给出10 km 以下两种水汽探测手段的结果,见图3和图4。
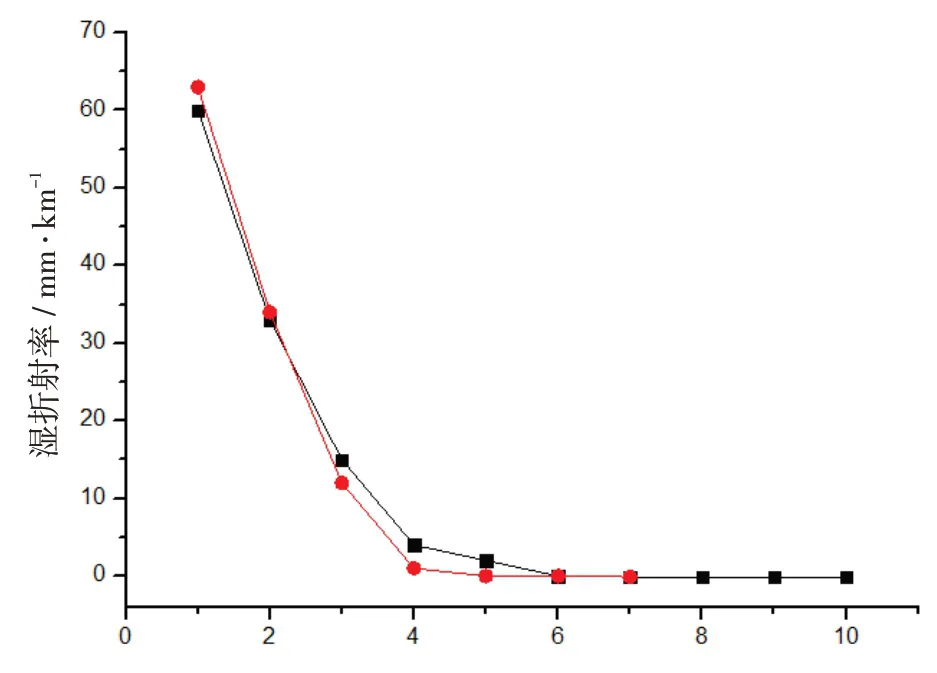
图3 基于卡尔曼滤波层析与探空资料对比图

图4 基于卡尔曼滤波四维层析对比图
(1)从图3 中可以看出基于卡尔曼滤波的层析算法的结果与探空资料反演的水汽值整体吻合较好,有效验证了本文层析算法的正确性。因此,将地基GPS气象服务网络的GPS观测站作为一个个实时探测的水汽的探空站,同时气象服务网络还可以反演水汽的水平变化情况。
(2)结合图3、图4的层析结果可以看出,基于卡尔曼滤波的层析算法可以层析出区域水汽湿折射率的空间四维分布,同时满足大气中水汽分布的基本规律,即对流层底层受水汽分布密集,随着高度上升水汽减少,水汽湿折射度逐渐减弱至零。同时也可以发现,水汽主要集中在距离地面5 km 的以下的范围。
(3)从上面的结果中虽然基于卡尔曼滤波的层析算法初步获得了西安地区层析结果,但是本文中缺乏一些外部气象数据综合分析降水期间的水汽变化特征,需要进一步综合分析水汽的变化特征。
4 结论
基于卡尔曼滤波的层析算法可以有效获得区域GPS网的水汽四维分布,其层析产品可以作为一种全天候的大气探测手段为分析大气中水汽的变化提供重要依据随着地基GPS 气象学的不断发展,尤其是四维层析结果的分析和应用[8],对于建立高精度的对流层模型具有重要意义,以此提高GNSS时间传递中对流层误差的处理水平,进一步提高GNSS时间传递的精度。
