机器人与腹腔镜左半结肠切除术对比的Meta 分析
2020-06-01厉泽宇彭杨杰王晶卢敏
厉泽宇 彭杨杰 王晶 卢敏
腹腔镜技术被引入结直肠领域至今已有近30 年[1]。其凭借能够放大视野,易配合超声刀等优点推动了结直肠手术的发展。目前,能够准确地找到膜间隙[2]进行分离、精准地解剖大血管根部、实现完整的系膜切除、避免脏器的副损伤已成为微创结直肠手术成功的标志[3]。左半结肠切除术主要适用于横结肠近脾曲、降结肠和乙状结肠的病变[4]。但是由于结肠脾曲的解剖关系复杂、对术者要求较高,所以左半结肠切除术,尤其是结肠脾曲的游离一直是腹腔镜手术中的难点[5]。机器人技术凭借其灵活的机械手臂及比腹腔镜更大更稳定的3D 视野使得术者能够更好地对脾门区进行解剖游离及左半结肠的完整系膜剥除。但由于机器人技术是一门新兴技术,目前缺乏机器人与腹腔镜手术之间大样本多中心的对比研究。故本文采用Meta分析比较腹腔镜左半结肠切除术(LA)与机器人辅助左半结肠切除术(RA)的临床疗效,为今后临床工作实践提供参考。
资料与方法
一、文献检索
以“Colectomy,Laparoscopy,Laparoscopes,Hand-Assisted Laparoscopy,Robotic Surgical Procedures,Minimally Invasive Surgical Procedures,DaVinci”为英文检索词检索、以“左半结肠切除术,左半横结肠切除术,结肠脾曲切除术,乙状结肠切除术,降结肠切除术,结肠左曲切除术,腹腔镜,机器人,达芬奇,微创”为中文检索词检索Pubmed,Embase,Web of science,万方,维普,中国生物医学文献数据库(CBM),中国知网(CNKI)数据库。检索时间为建库至2019 年8 月。
二、文献纳入标准
(1)已公开发表的文献,内容包含腹腔镜左半结肠切除术与机器人辅助左半结肠切除术之间对比,或腹腔镜结肠切除术与机器人辅助结肠切除术之间对比,包含左半结肠切除术亚组对比。左半结肠包括左半横结肠,结肠脾曲,降结肠,乙状结肠,语言为中文或英文;(2)具有客观的临床结果,文献中至少纳入有无手术史,手术时间,术中出血量,中转开腹情况,淋巴结清扫数量,术后并发症,术后排气和开始进食时间,住院时间与总住院费用中的一项。
三、文献排除标准
(1)关于结肠手术但不包含独立左半结肠切除术亚组对比的研究;(2)无明确参数或无法从结果中提取数据的研究;(3)文献重复,或者文献类型为综述、信件、专家意见、没有原始数据的评论、病例报告等。
四、数据提取与文献质量评估
数据由两位审查员根据上述排除与纳入标准独立提取,对于意见不统一的文献经协商或与第三位审查员商讨解决。提取数据包括:第一作者、发表时间、研究类型、两组病例数、性别、年龄、BMI、患病类型、ASA、若为恶性肿瘤其TNM 分期、既往手术史、手术时间、术中出血量、中转开腹情况、淋巴结清扫数量、术后并发症、术后排气和开始进食时间、住院时间、总住院费及术后死亡情况。根据纳入与排除标准,入选文献采用NOS文献质量评价标准进行评分,NOS 评分为0~9 分,得分≥6 分的文献被认为研究方法是合理的,可纳入研究。
五、统计学分析
应用Review Manager 5.3 软件进行数据分析。对于二分类变量使用比值比(OR)分析,连续性变量利用均数差(MD)评估。计算其95%CI,P<0.05 为差异有统计学意义。如文献中提供的是中位数(范围),则通过Hozo 等[6]研究中的方法估算均数和标准差。根据异质性结果,选择计算模型,若无异质性(P>0.1,I2<50%),则采用固定效应模型进行分析;若存在异质性(P<0.1,I2≥50%),则分析异质性来源,并用随机效应模型进行分析。之后将手术部位,良性病变,恶性病变进一步分成亚组进行分析。
结果
一、文献提取情况
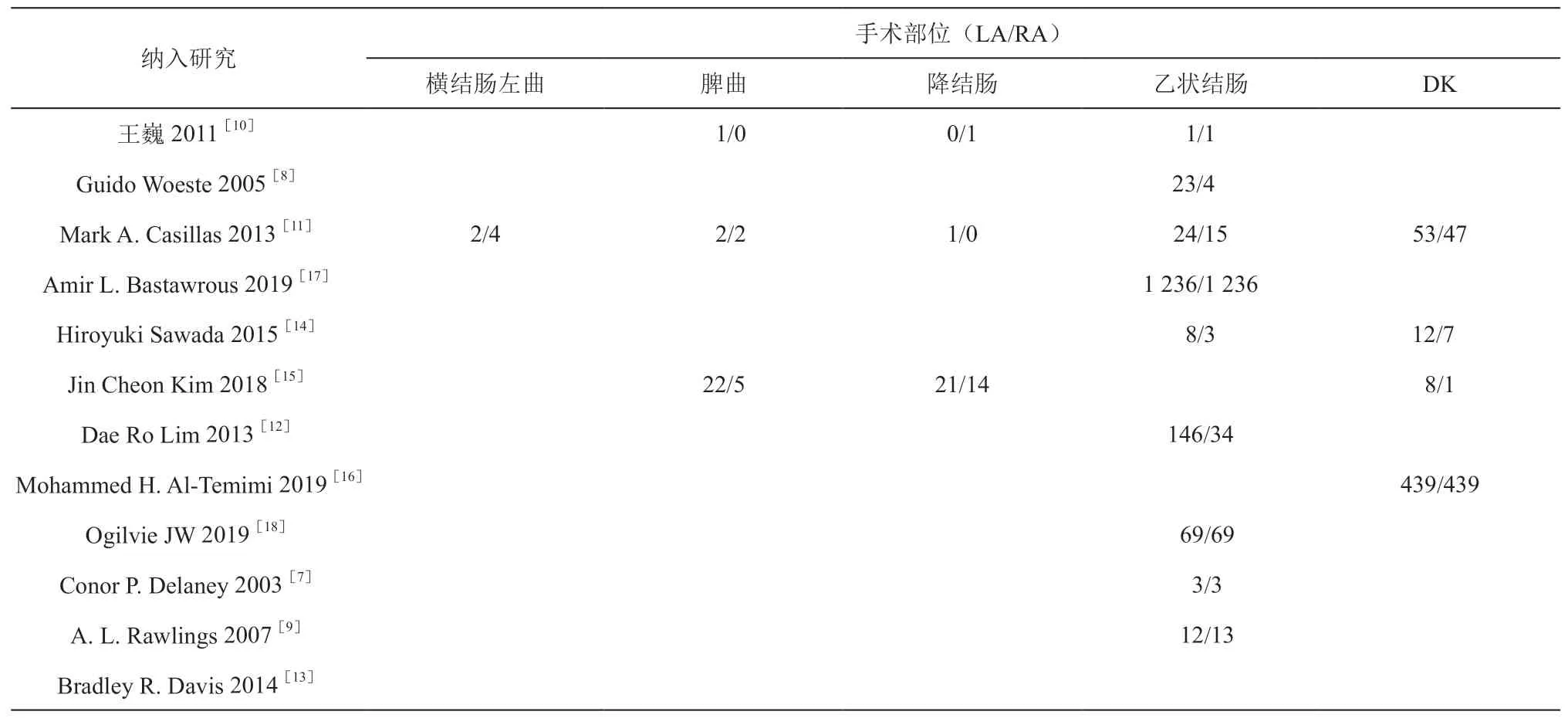
文献检索及筛查流程见图1。最终纳入文献12篇[7-18],均为病例对照研究。共包括4 633例患者,其中腹腔镜组患者2 409例,机器人组患者2 224例。纳入研究基本信息见表1。各亚组间比较差异无统计学意义(P>0.05)。
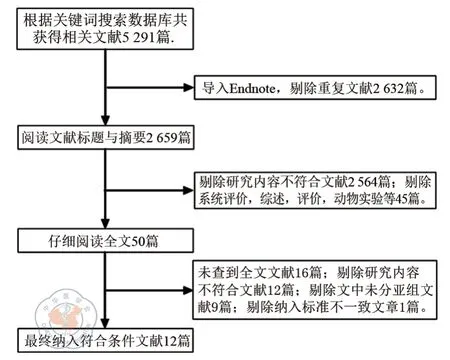
图1 文献检索流程图
表1 纳入患者基本信息(,例)

表1 纳入患者基本信息(,例)
续表
二、Meta 分析结果
(一)手术时间
共纳入10 篇文献[7-16],各研究之间存在异质 性(I2=79% >50%,P=0.001 <0.1),采用随机效应模型进行分析,结果提示:腹腔镜手术时间明显短于机器人组(MD=-55.06,95%CI=-69.84~-40.28,Z=7.30;P<0.001)。见图2。
(二)术中失血
共纳入8 篇文献[7-12,14,18],各研究之间不存在异质性(I2=24% <50%,P=0.23 >0.1),采用固定效应的Meta 分析。结果提示:腹腔镜组术中失血量高于机器人组(MD=11.07,95%CI=3.65~18.5,Z=2.92;P=0.003 <0.05)。见图3。
(三)中转开腹率
共纳入10 篇文献[8-12,14-18],各研究之间不存在异质性(I2=0 <50%,P=0.58 >0.1),采用固定效应的Meta 分析。结果提示:腹腔镜组中转开腹率高于机器人组(OR=1.74,95%CI=1.40~2.16,Z=5.01;P<0.00001)。见图4。
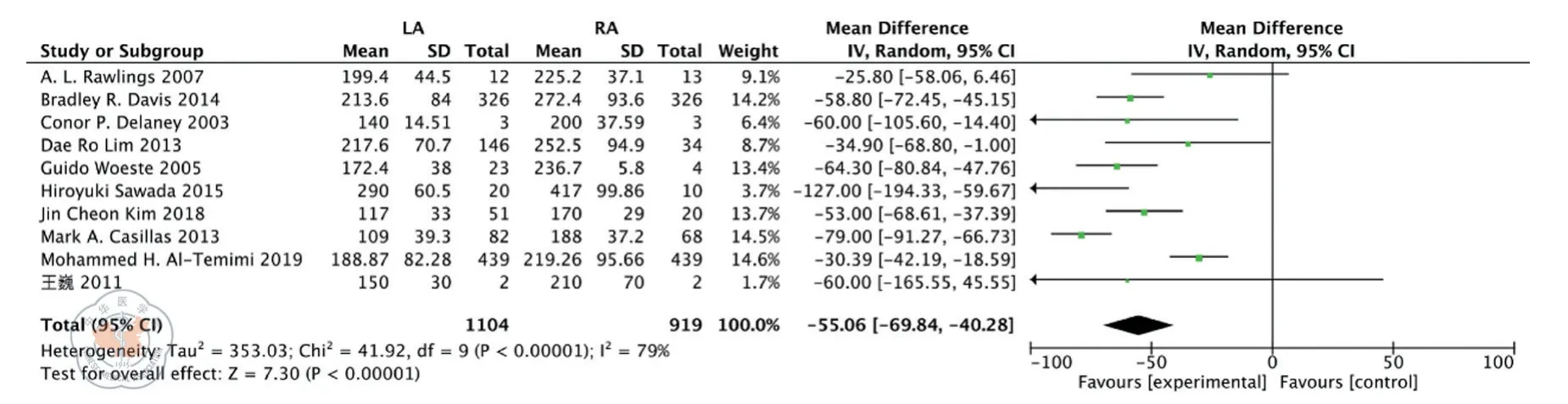
图2 两组手术时间比较的Meta 分析

图3 两组术中失血比较的Meta 分析
(四)淋巴结清扫数
共纳入5 篇文献[10-12,14,15],各研究之间存在异质性(I2=70 >50%,P=0.1),采用随机效应模型进行分析,结果提示:两组中淋巴结清扫数差异无统计学意义(MD=-0.02,95%CI=-0.48~0.44,Z=0.08;P=0.94 >0.05)。见图5。
(五)术后并发症
共纳入8 篇文献[7-8,10-12,14-16],各研究之间不存在异质性(I2=0 <50%,P=0.71 >0.1),采用固定效应的Meta 分析。结果提示:腹腔镜组患者术后出现并发症概率大于机器人组(OR=1.30,95%CI=1.00~1.69,Z=1.94;P=0.05)。见图6。
(六)排气时间
共纳入5 篇文献[10,12,14,15,18],各研究之间不存在异质性(I2=0 <50%,P=0.69 >0.1)。采用固定效应的Meta 分析。结果提示:两组的排气时间差异不具有统计学意义。(MD=0.18,95%CI=-0.07~0.44,Z=1.42;P=0.16 >0.05)。见图7。
(七)术后进食时间
共纳入3 篇文献[10,12,15],各研究之间存在异质性,(I2=75% >50%,P=0.05 <0.1),因纳入研究术过少无法进行敏感性分析查找异质原因,故采用随机效应模型进行分析,结果提示:两组中术后进食时间差异无统计学意义(MD=0.36,95%CI=-0.32~1.05,Z=1.03;P=0.30)。见图8。
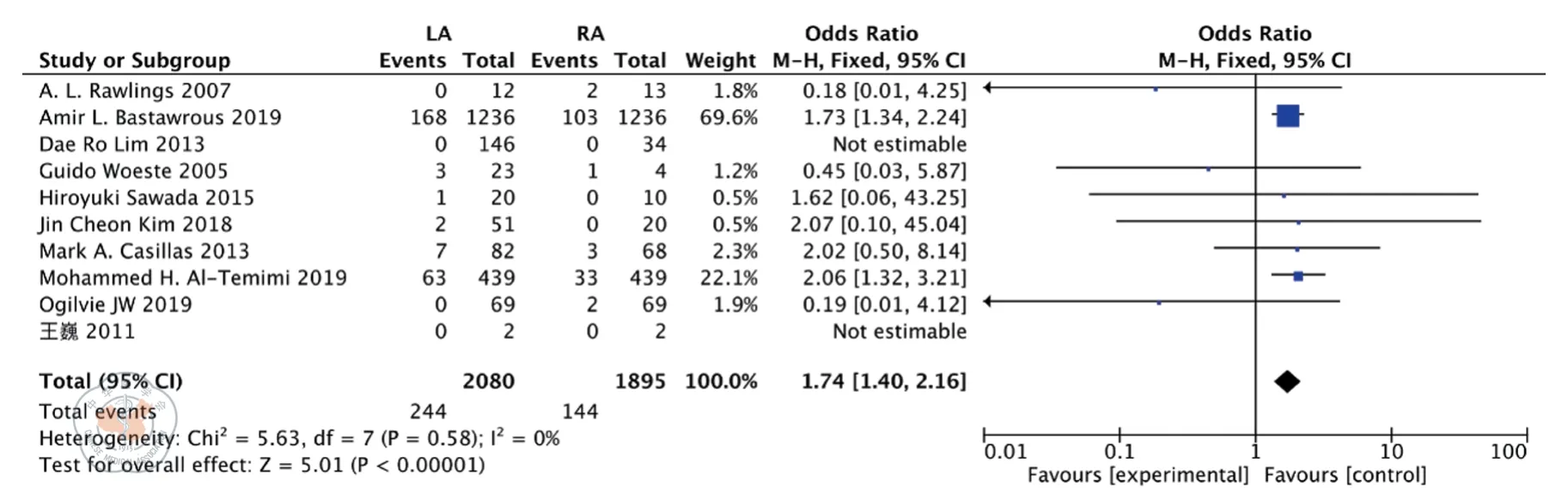
图4 两组中转开腹率比较的Meta 分析
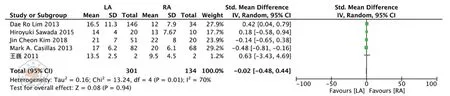
图5 两组淋巴结清扫数比较的Meta 分析
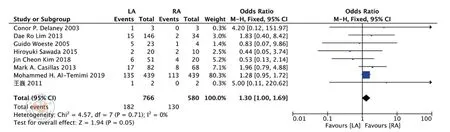
图6 两组术后并发症比较的Meta 分析
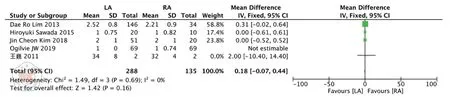
图7 两组排气时间比较的Meta 分析
(八)住院时间
共纳入10 篇文献[7,9-16,18],各研究之间存在异质性(I2=70% >50%,P=0.0004 <0.1),采用随机效应模型进行分析,结果提示:腹腔镜组住院时间要高于机器人组(MD=0.74,95%CI=0.19~1.30,Z=2.65;P=0.008 <0.05),见图9。
(九)总住院费用
共纳入5 篇文献[7,9,13,15,18],各研究之间存在异质性(I2=82% >50%,P=0.0002 <0.1),采用随机效应模型进行分析,结果提示:腹腔镜组住院总费用少于机器人组(MD=-2 755.04,95%CI=-5 362.85~-147.22,Z=2.07;P=0.04 <0.05)。见图10。
(十)有无手术史
共纳入5 篇文献[7,10,12,14-15],各研究之间不存在异质性(I2=32%<50%,P=0.22 >0.1),采用固定效应模型进行分析。结果提示:两组之间患者有无手术史的比较差异无统计学意义(OR=1.15,95%CI=0.57~2.29,Z=0.39;P=0.07 >0.05)。见图11。
三、亚组对比
(一)乙状结肠切除术间对比
除手术时间及中转开腹率以外,其余亚组间比较差异均不具有统计学意义。

图8 两组术后进食时间比较的Meta 分析
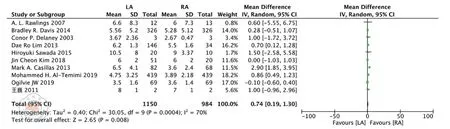
图9 两组术后住院时间比较的Meta 分析

图10 两组总住院费用比较的Meta 分析
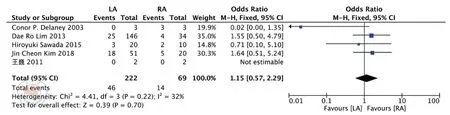
图11 两组既往手术史之间比较的Meta 分析
1.乙状结肠切除术手术时间
共纳入3 篇文献[7,9,12],各研究之间不存在异质性(I2=0%<50%,P=0.48 >0.1),采用固定效应模型进行分析。结果提示:腹腔镜组手术时间少与机器人组(MD=-36.34,95%CI=-57.14~-15.54,Z=3.42,P=0.0006 <0.05)。见图12。
2.乙状结肠切除术中转开腹率
共纳入4 篇文献[9,12,17-18],各研究之间不存在异质性(I2=49%<50%,P=0.14 >0.1),采用固定效应模型进行分析。结果提示腹腔镜组中转开腹旅较机器人组高(OR=1.65,95%CI=1.28~2.13,Z=3.86,P=0.0001 <0.05)。见图13。
(二)良性病变间对比
除中转开腹率以外,其余亚组间比较差异均不具有统计学意义。
良性病变手术患者中转开腹率比较的共纳入4 篇文献[8,16-18],各研究之间不存在异质性(I2=16%<50%,P=0.31 >0.1),采用固定效应模型进行分析。结果提示:腹腔镜组中转开腹旅较机器人组高(OR=1.76,95%CI=1.41~2.20,Z=5.01;P=0.00001 <0.05)。见图14。
(三)恶性病变间对比
除手术时间、术中失血量及住院时间以外,其余亚组间比较差异均不具有统计学意义。
1.恶性病变切除术手术时间

图12 两组中乙状结肠切除术之间手术时间对比
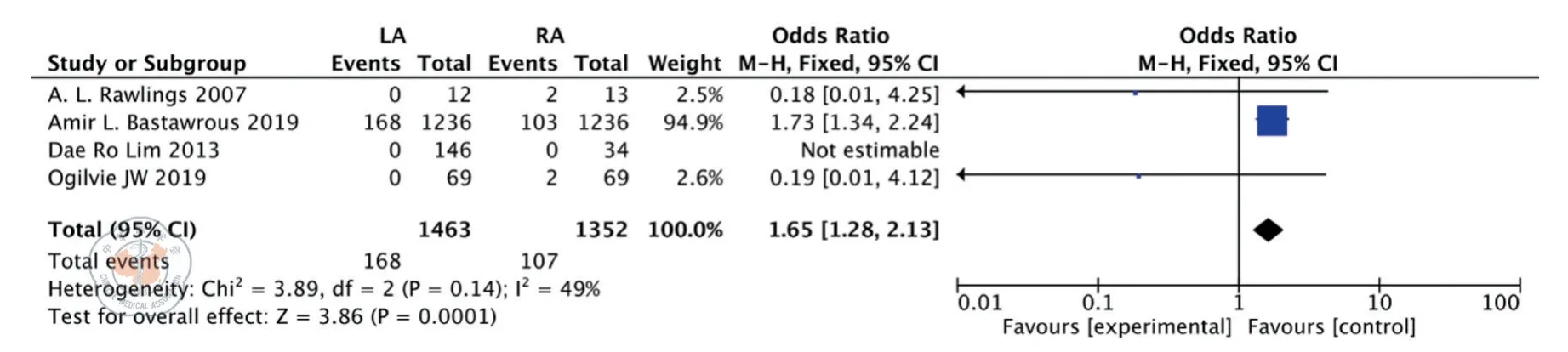
图13 乙状结肠切除术之间中转开腹率对比
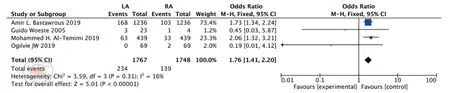
图14 良性病变手术患者中转开腹率对比
共纳入4 篇文献[10,12,14-15],各研究之间不存在异质性(I2=48%<50%,P=0.12 >0.1),采用固定效应模型进行分析。结果提示:腹腔镜组手术时间少与机器人组(MD=-53.23,95%CI=-66.98~-39.47,Z=7.59;P=0.00001 <0.05)。见图15。
2.恶性病变切除术术中失血量
共纳入3 篇文献[10,12,14],各研究之间不存在异质性(I2=0%<50%,P=0.95 >0.1),采用固定效应模型进行分析。结果提示:腹腔镜组术中失血量多于机器人组(MD=17.73,95%CI=8.58~26.89,Z=3.80;P=0.0001 <0.05)。见图16。
3.恶性病变切除术住院时间
共纳入4 篇文献[10,12,14-15],各研究之间不存在 异 质 性(I2=0% <50%,P=0.63 >0.1),采用固定效应模型进行分析。结果提示:腹腔镜组住院时间多于机器人组(MD=0.58,95%CI=0.09~1.06,Z=2.33;P=0.02 <0.05)。见图17。
四、敏感性分析
对以上Meta 分析结果进行敏感性分析,排除质量较差、数据变异较大及样本量较小的文献(如手术时间组中将敏感性较大的Mark A.Casillas 2013[11]及Mohammed H.Al-Temimi 2019[16]两篇文献剔除)后,各观察指标未发生转移且变化较小,可认为Meta 分析结果较可靠。
五、发表偏倚
发表偏倚以漏斗图进行分析。以术后并发症为例,图18 显示散点均分布在漏斗内(95%CI),且左右数目大致相等,表明发表偏倚对结果可靠性的影响较小。各亚组纳入文献过少,发表偏倚必然存在,故不特殊讨论。
讨 论

图15 恶性病变手术时间对比

图16 恶性病变术中失血对比
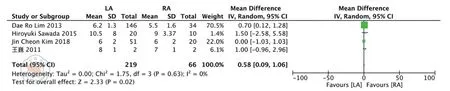
图17 恶性病变住院时间对比
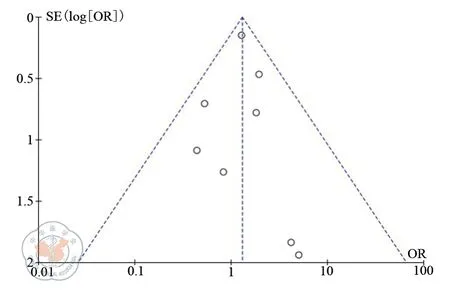
图18 术后并发症的发表偏倚漏斗图
本研究显示,RA 组较LA 组术中出血量少、中转开腹率低、术后并发症少且住院时间短。说明机器人手术在安全性及短期疗效上均优于腹腔镜手术。这些优越性归功于机器人技术拥有可以过滤震颤、可放大10~14 倍的3D 镜头及7 个灵敏的机械操作手臂等优点,使术者获得更加清晰的视野及进行更加精细的操作[19]。而传统腹腔镜下行左半结肠切除术的主要难点是结肠脾曲生理位置较高,脾门部位脂肪层较厚,层次不清晰且血管走行不规律,变异大血管较多等原因,常导致膜间隙不清晰,难于分离,易损伤脾门,导致出血[20]。机器人技术使术者更好地对脾门区进行解剖及左半结肠的完整系膜剥除,减少手术对脏器、血管及神经的副损伤,能够使手术更加安全,减少患者创伤,增加术后恢复速度,从而使左半结肠切除术更加安全。查阅文献,目前已有关于LA 与RA 行左半结肠切除术对比分析的文章[21],但是与其不同的是本研究首次对机器人与腹腔镜行左半结肠切除术间对比进行了亚组分析,即分别对包含了乙状结肠切除术、良性病变或恶性病变的文章进行了单独分析。其结果显示乙状结肠亚组中RA 组较LA 组手术时间短、中转开腹率低;良性病变亚组中RA 组较LA 组中转开腹率低;恶性病变亚组中RA 组较LA 组失血量少、住院时间短。这些亚组分析结果均与整体分析结果相一致。同时也进一步说明了机器人技术在左半结肠切除术中是更安全可靠的。
本研究发现尽管机器人技术有诸多优势,但也存在一些不尽人意的地方。其中,RA 组的手术时间要明显高于LA 组,这一结果的组间异致性较高(I2=79%),这可能与各研究间手术部位及所患疾病不同有关。进行亚组分析后,乙状结肠亚组与恶性病变亚组手术时间对比异质性较低且差异有统计学意义,结果与整体分析结果相一致。由于机器人是新兴技术,术者对设备准备及使用、操作不熟练是造成手术时间延长的主要原因之一。正如Kim 等[15]的研究所示,RA 与LA 组在单纯手术时间上是十分相近的。因此可以推测,随着机器人技术的普及与推行,临床医生技术的不断熟练,设备的更新及操作简化,机器人技术的操作时间必将逐渐缩短[22-23]。
另外,目前机器人手术的总体费用要远远高于腹腔镜手术。就单纯手术费用来说,RA 组仅稍高于LA 组[7,9,18]。但由于RA 组的设备消耗及手术耗材的费用远高于LA 组,其总费用要超过LA 组很多。
综上,机器人辅助手术相比于腹腔镜手术具有更小的损伤,更快的恢复,及更短的住院时间等优势,使其在微创手术领域的优选地位日渐提高。但由于其费用很高,手术性价比并不高[24],适用人群有局限性。这些结果可以在临床工作中帮助医生和患者根据患者自身情况选择最佳的治疗方案。但是由于机器人技术开展较晚,因此收录文献大多为短期疗效研究;由于左半结肠切除术包含概念较多,大多数文献使用笼统概念;部分文献纳入信息过少,参考价值有限。但由于两者对比文献过少,为了进一步进行亚组分析,无法剔除,进而一定程度上影响了结论的可信度。另外本文收录的文献均为病例对照,需要前瞻性RCT 研究去加以验证,为临床医生提供更加准确的参考依据。