与机器人有关的中考物理题赏析
2020-05-28向汝星
向汝星
随着智能型机器人的不断研发,机器人已经应用到日常生活中的各个行业.近几年,在各地中考物理试题中也经常出现与机器人有关的考题,下面略举几例以供赏析.
例题1 如图1所示,某公司研发的智能家务机器人,它具有净化室内空气、陪伴老人聊天散步等功能.若它在50N的牵引力作用下,以0.5m/s的速度在水平地面匀速直线行驶60s,求:(1)它行驶的路程;(2)此过程中牵引力所做的功.
【分析】(1)已知速度和时间,利用速度公式计算它行驶的路程;
(2)利用W=FS计算此过程中牵引力所做的功.
【解答】(1)因v=st,所以它行驶的路程
s=vt=0.5m/s×60s=30m;
(2)此过程中牵引力所做的功
W=Fs=50N×30m=1500J.
答:(1)它行驶的路程为30m;(2)此过程中牵引力所做的功为1500J.
【点评】此题考查功的计算、速度公式的应用,难度不大,属于基础知识考查.
例题2 (2018·广西北部湾)图2是一款新研发的机器人.若机器人重为15N,与地面的接触面积是1×10-3m2,牵引力大小是10N,机器人在水平地面上沿直线行走10m,用时100s.求:(1)机器人行走的平均速度;(2)机器人牵引力做的功;(3)机器人静止时对水平面的压强.
【解答】(1)机器人行走的平均速度
v=st=10m100s=0.1m/s.
(2)机器人牵引力做的功
W=F·s=10N×10m=100J.
(3)机器人静止时对水平面的压强
p=FS=15N(1×[10]-3m2)=1.5×104Pa.
【点评】此题考查功的计算,平均速度公式、压强公式的应用.
例题3 (2017·广东)常用机器人潜入水下打捞沉船上的物体(ρ水=1.0×103kg/m3,g=10N/kg).
(1)某时刻机器人在水下用竖直向上的力举着体积为0.03m3,密度为2.5×103kg/m3的实心物体静止不动,该力的大小是多少?
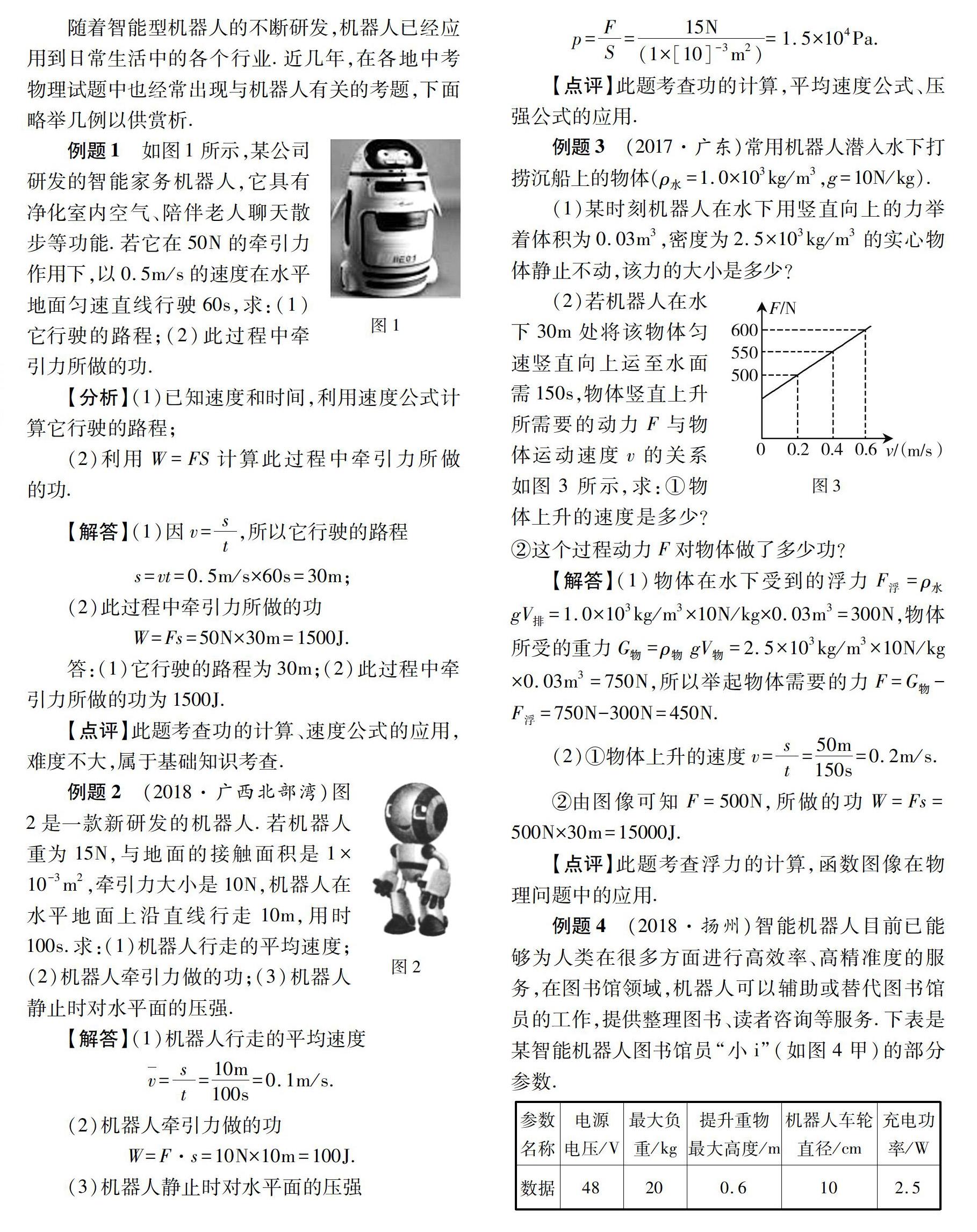
(2)若机器人在水下30m处将该物体匀速竖直向上运至水面需150s,物体竖直上升所需要的动力F与物体运动速度v的关系如图3所示,求:①物体上升的速度是多少?②这个过程动力F对物体做了多少功?
【解答】(1)物体在水下受到的浮力F浮=ρ水gV排=1.0×103kg/m3×10N/kg×0.03m3=300N,物体所受的重力G物=ρ物gV物=2.5×103kg/m3×10N/kg×0.03m3=750N,所以举起物体需要的力F=G物-F浮=750N-300N=450N.
(2)①物体上升的速度v=st=50m150s=0.2m/s.
②由图像可知F=500N,所做的功W=Fs=500N×30m=15000J.
【点评】此题考查浮力的计算,函数图像在物理问题中的应用.
例题4 (2018·扬州)智能机器人目前已能够为人类在很多方面进行高效率、高精准度的服务,在图书馆领域,机器人可以辅助或替代图书馆员的工作,提供整理图书、读者咨询等服务.下表是某智能机器人图书馆员“小i”(如图4甲)的部分参数.
参数名称电源电压/V最大负重/kg提升重物
最大高度/m机器人车轮直径/cm充电功率/W
数据48200.6102.5
(1)读者与“小i”对话,咨询某图书所在的位置,“小i”需将读者的声音信号转化为电流信号,这与(填“发电机”或“电动机”)的原理相同.
(2)在阳光充足的时候,“小i”可以通过将能转化为电能的方式实现无线充电.
(3)“小i”也提供无线上网服务,它与互联网之间通过来传递信息.
(4)“小i”每天需将1944kg图书从借阅处分批搬回书架上,每次放回需将图书提高0.5m,则每天搬书上书架做功J,若充电效率为90%,则每天应至少充电 h.(g取10N/kg)
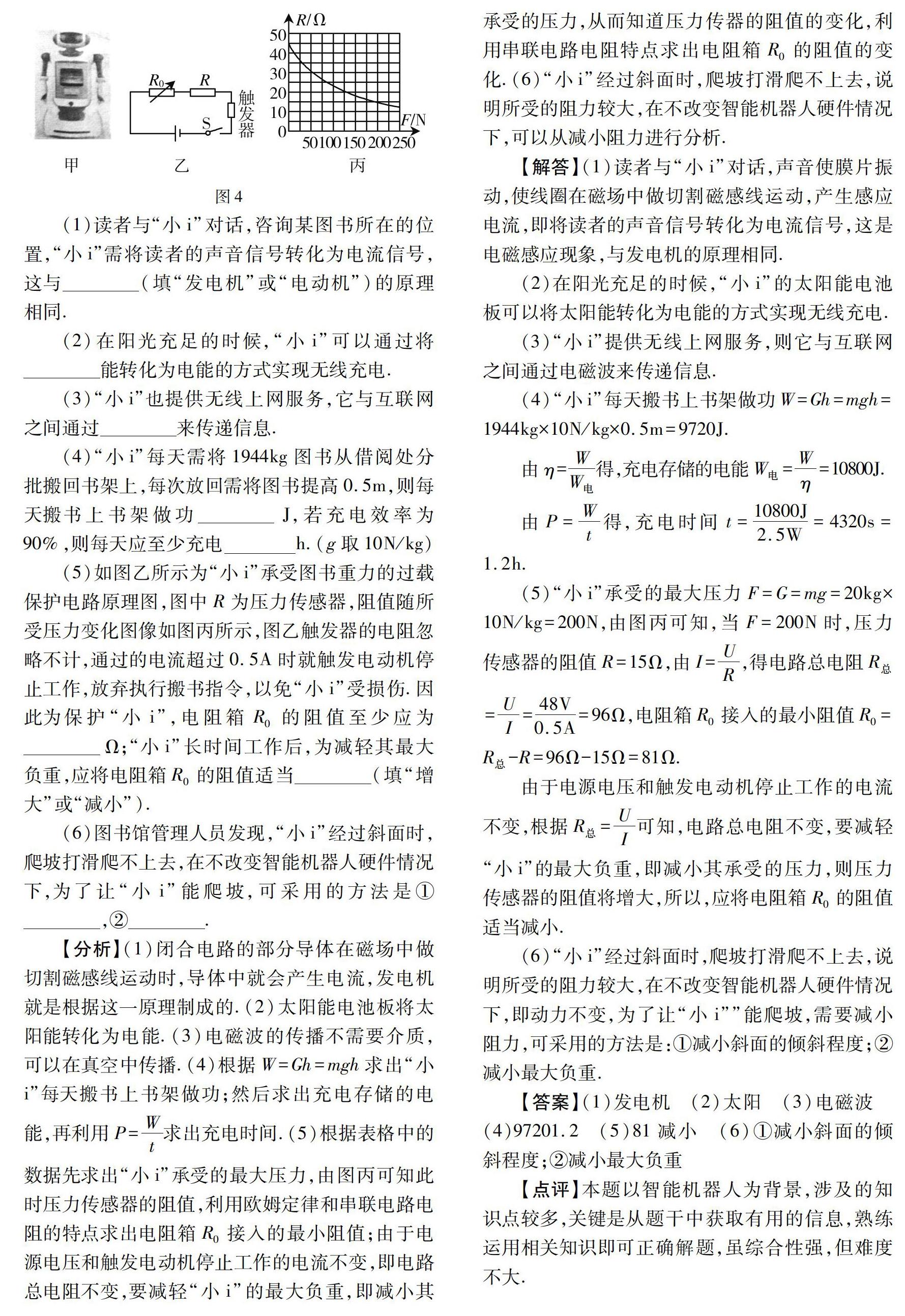
(5)如图乙所示为“小i”承受图书重力的过载保护电路原理图,图中R为压力传感器,阻值随所受压力变化图像如图丙所示,图乙触发器的电阻忽略不计,通过的电流超过0.5A时就触发电动机停止工作,放弃执行搬书指令,以免“小i”受损伤.因此为保护“小i”,电阻箱R0的阻值至少应为Ω;“小i”长时间工作后,为减轻其最大负重,应将电阻箱R0的阻值适当(填“增大”或“减小”).
(6)图书馆管理人员发现,“小i”经过斜面时,爬坡打滑爬不上去,在不改变智能机器人硬件情况下,为了让“小i”能爬坡,可采用的方法是①,②.
【分析】(1)闭合电路的部分导体在磁场中做切割磁感线运动时,导体中就会产生电流,发电机就是根据这一原理制成的.(2)太阳能电池板将太阳能转化为电能.(3)电磁波的传播不需要介质,可以在真空中传播.(4)根据W=Gh=mgh求出“小i”每天搬书上书架做功;然后求出充电存储的电能,再利用P=Wt求出充电时间.(5)根据表格中的数据先求出“小i”承受的最大压力,由图丙可知此时压力传感器的阻值,利用欧姆定律和串联电路电阻的特点求出电阻箱R0接入的最小阻值;由于电源电压和触发电动机停止工作的电流不变,即电路总电阻不变,要减轻“小i”的最大负重,即减小其承受的压力,从而知道压力传器的阻值的变化,利用串联电路电阻特点求出电阻箱R0的阻值的变化.(6)“小i”經过斜面时,爬坡打滑爬不上去,说明所受的阻力较大,在不改变智能机器人硬件情况下,可以从减小阻力进行分析.
【解答】(1)读者与“小i”对话,声音使膜片振动,使线圈在磁场中做切割磁感线运动,产生感应电流,即将读者的声音信号转化为电流信号,这是电磁感应现象,与发电机的原理相同.
(2)在阳光充足的时候,“小i”的太阳能电池板可以将太阳能转化为电能的方式实现无线充电.
(3)“小i”提供无线上网服务,则它与互联网之间通过电磁波来传递信息.
(4)“小i”每天搬书上书架做功W=Gh=mgh=1944kg×10N/kg×0.5m=9720J.
由η=WW电得,充电存储的电能W电=Wη=10800J.
由P=Wt得,充电时间t=10800J2.5W=4320s=1.2h.
(5)“小i”承受的最大压力F=G=mg=20kg×10N/kg=200N,由图丙可知,当F=200N时,压力传感器的阻值R=15Ω,由I=UR,得电路总电阻R总=UI=48V0.5A=96Ω,电阻箱R0接入的最小阻值R0=R总-R=96Ω-15Ω=81Ω.
由于电源电压和触发电动机停止工作的电流不变,根据R总=UI可知,电路总电阻不变,要减轻“小i”的最大负重,即减小其承受的压力,则压力传感器的阻值将增大,所以,应将电阻箱R0的阻值适当减小.
(6)“小i”经过斜面时,爬坡打滑爬不上去,说明所受的阻力较大,在不改变智能机器人硬件情况下,即动力不变,为了让“小i””能爬坡,需要减小阻力,可采用的方法是:①减小斜面的倾斜程度;②减小最大负重.
【答案】(1)发电机 (2)太阳 (3)电磁波 (4)97201.2 (5)81减小 (6)①减小斜面的倾斜程度;②减小最大负重
【点评】本题以智能机器人为背景,涉及的知识点较多,关键是从题干中获取有用的信息,熟练运用相关知识即可正确解题,虽综合性强,但难度不大.
