潜艇X舵控制分配器设计和仿真
2020-05-28商建朋李文魁黄跃鹏
商建朋,李文魁*,黄跃鹏
1 海军工程大学 电气工程学院,湖北 武汉 430033
2 中国人民解放军东部战区 海军保障部,浙江 宁波 315122
0 引 言
潜艇艉舵目前主要有2种布置方式:一种是十字形(含H形和木字形),另一种是X形。相对于十字形舵(以下称“十字舵”),X形舵(以下称“X舵”)的操纵性、安全性得到了提升,并被广泛应用于潜艇艉舵的设计,例如瑞典的“哥特兰”级、澳大利亚的“科林斯”级、德国的212A型、日本的“苍龙”级常规潜艇,以及法国的“梭鱼”级攻击核潜艇、美国在建的最新型“哥伦比亚”级战略核潜艇等。然而,X舵也面临着诸如人工操舵不直观等主要问题。对于X舵操纵控制系统而言,计算机自动控制是其主要模式,所以设计高性能、高可靠性的操纵控制算法尤为重要。
在X舵潜艇运动建模方面,胡坤等[1]建立了X 舵与十字舵舵角转换数学模型,开展了等效舵角转换装置的仿真验证。在X舵控制算法方面,曾俊宝[2]以AUV为对象,研究了对角联动方式下的X舵PID控制,并进行了湖上及海上试验,但其主控制器采用的是PID控制算法,分配方式为对角联动,未考虑三舵、双舵情况下的分配问题;Zhang等[3]在传统十字舵AUV控制结构中引入舵角分配器,基于重构方法研究了X舵的容错控制分配问题。此外,还有学者基于伪逆法深入研究了多舵面控制分配算法[4-5]。伪逆法的优点在于计算比较简单且不用考虑操纵机构的约束条件。然而在实际应用中,伪逆法难以求解受约束的控制分配问题。
针对潜艇X舵的控制分配问题,本文将采用“主控制器—控制分配器”级联控制结构的操舵系统和成熟算法的主控制器,在考虑舵机受到舵速限幅和舵角限幅的条件下,选用加权最小二乘法(Weighted least squares,WLS)设计潜艇X舵的控制分配器,以实现多舵面控制分配,并通过仿真试验,验证不同可用舵面下的操舵控制效果,用以为实际工程应用提供一定的参考。
1 X舵潜艇操纵运动建模
本文建模采用的坐标系、名词术语、符号规则均来源于ITTC和SNAME术语公报推荐的体系[6-7],对应的固定坐标系(定系)E-ξηζ和运动坐标系(动系)O-xyz如图1所示。图中,潜艇受力在动系下的各分量分别为:纵向力X、横向力Y、垂向力Z以及横倾力矩K、纵倾力矩M和偏航力矩N。
1.1 X舵布局与舵力分析
X舵操纵面一般由舵面和稳定翼组成,稳定
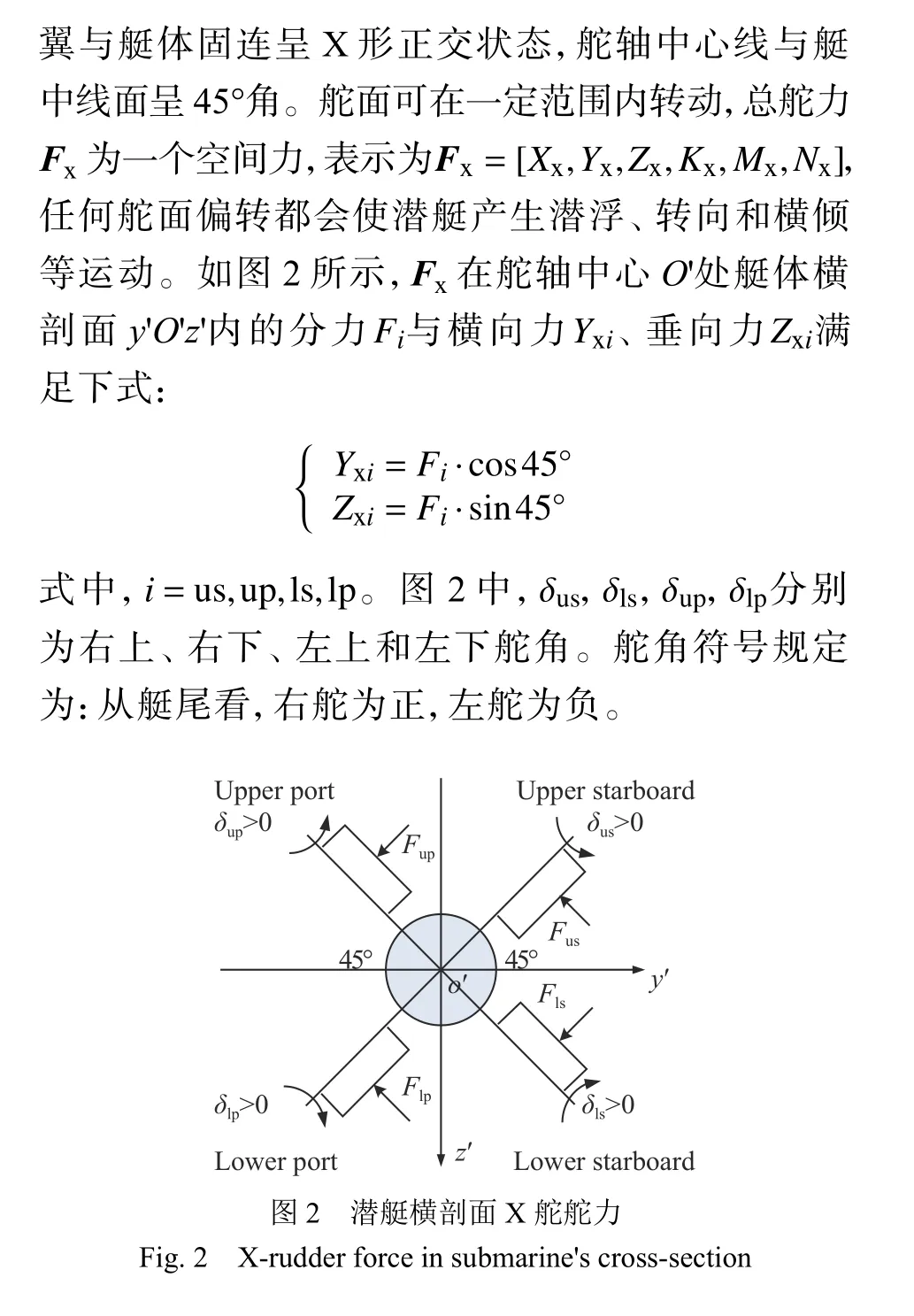
1.2 X舵潜艇空间操纵运动模型

2 X舵潜艇操舵控制器基本结构
基于高可靠性要求,许多现代飞行器和水下航行体均采用过驱动系统,其基本特征是控制量维数大于被控量维数。过驱动系统的控制器设计常采用“主控制器—控制分配器”级联结构,即主
3 X舵控制分配算法


3.1 控制效率阵分析

3.2 控制分配算法


4 仿真验证

4.1 定深旋回仿真
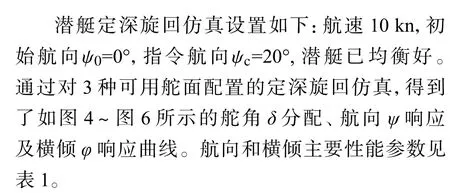
仿真结果表明:四舵及三舵配置下均采用对角联动操舵,四舵时舵角平滑无抖动,三舵时舵角略有抖动,而双舵时舵角却抖动明显(图4);在3种可用舵面配置下旋回时,潜艇转向平稳(图5和表1);四舵时横倾角略有振荡,三舵时横倾峰值最大,但振荡不明显,双舵时横倾角振荡明显(图6和表1)。由此可见,随着操舵面的减少,潜艇的操纵性能逐渐下降,横倾振荡和舵角抖动趋于严重。
4.2 潜浮运动仿真

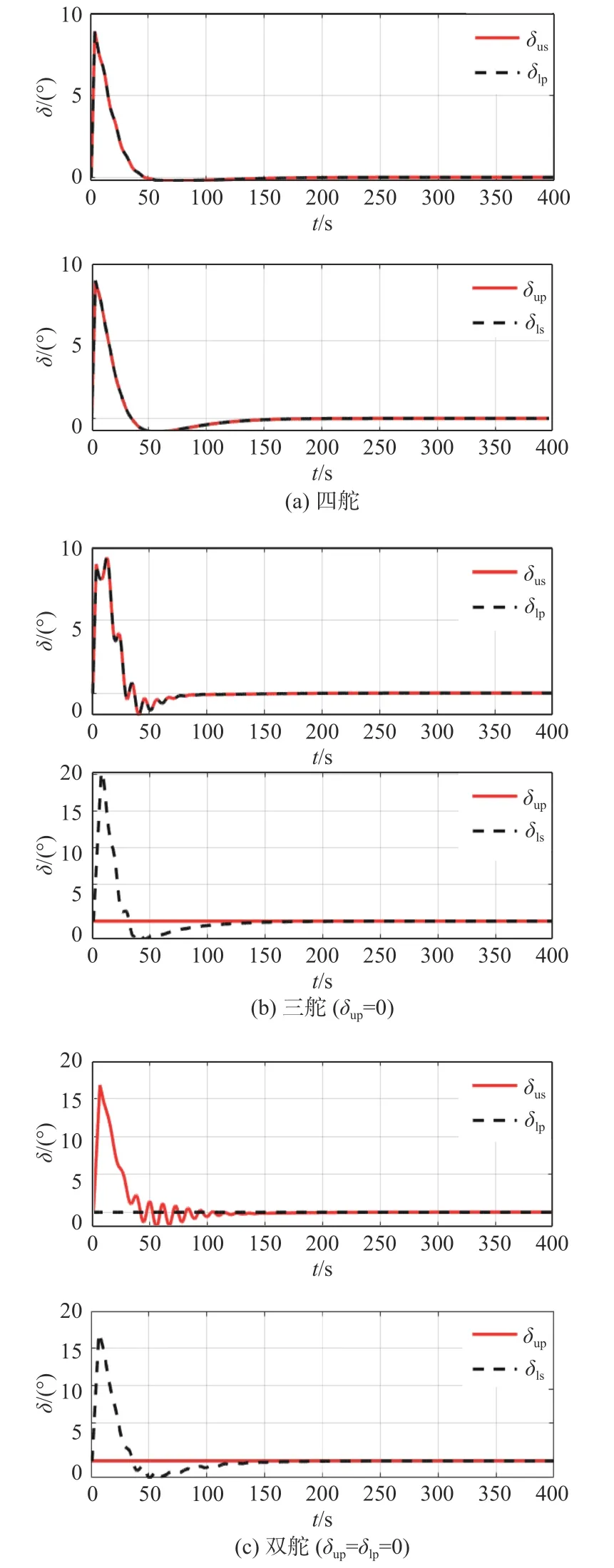
图 4 定深旋回时的舵角分配Fig. 4 Rudder angle allocation on turning at certain depths

图 5 定深旋回时的航向响应Fig. 5 Heading response on turning at certain depths

图 6 定深旋回时的横倾响应Fig. 6 Heeling angle response on turning at certain depths
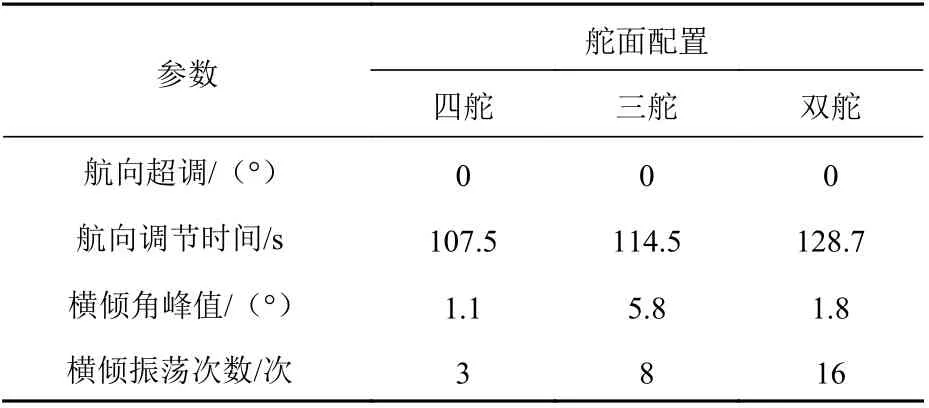
表 1 3种可用舵面配置下定深旋回运动控制效果对比Table 1 Control effect comparison on turning at certain depths under three kinds of available rudder configuration


图 7 潜浮时的舵角分配Fig. 7 Rudder angle allocation on diving
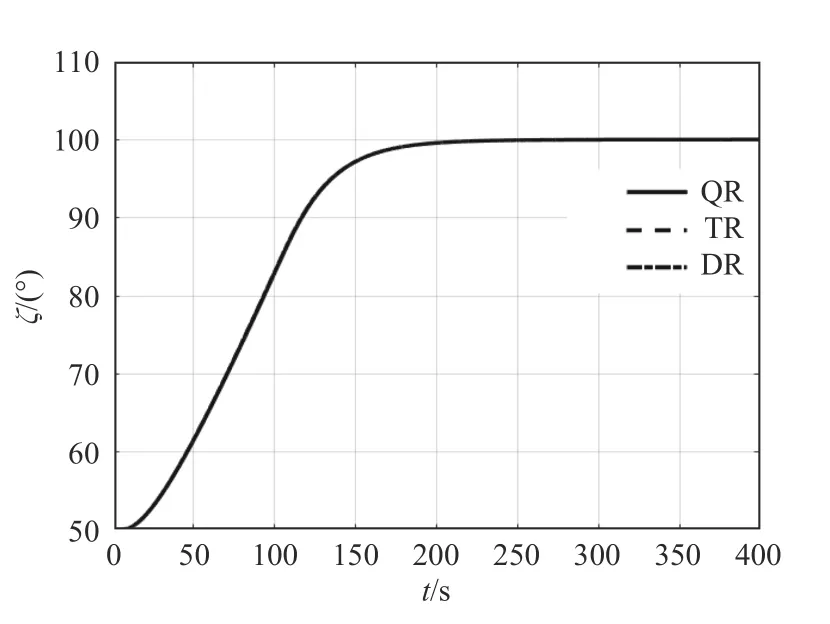
图 8 潜浮时的深度响应Fig. 8 Depth response on diving
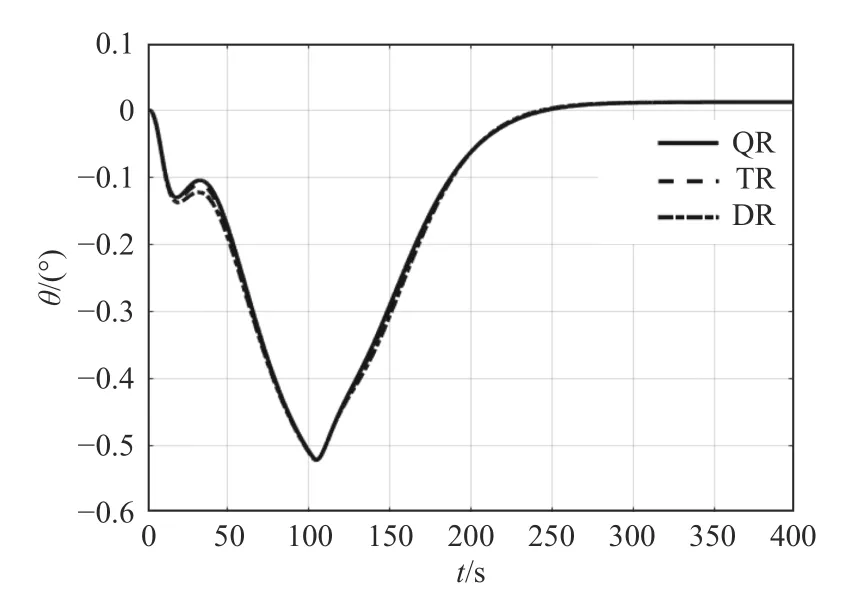
图 9 潜浮时的纵倾响应Fig. 9 Pitch angle response on diving

图 10 潜浮时的横倾响应Fig. 10 Roll response on diving
仿真结果表明:四舵及三舵条件下均采用对角联动操舵(图7);四舵时无横倾,三舵时横倾变化平滑,这两种配置下操舵平滑,双舵时横倾峰值最大,并存在横倾振荡和舵角抖动的现象(图7和图10);3种可用舵面配置下的深度、纵倾控制性能差别较小(图8和图9),这是因为艏舵对深度的控制起了主要作用,而单艉舵深度控制时的X舵控制律还需进一步研究。
这里需要说明的是,三舵、双舵类型具有不同的舵机配置,上述仿真曲线是在给定舵机配置条件下得到的,而不同舵机配置情况下的控制分配算法相同,但航向和深度控制性能会有所差异。
5 结 语
针对潜艇X舵操纵控制,本文采用了“主控制器—控制分配器”级联控制结构,其中,主控制器使用的是现有的基于NDO的改进滑模控制器,控制分配器设计则采用了加权最小二乘法的控制分配算法,此算法适用于各种舵机配置情况。仿真结果表明,在给定舵机配置下,随着操舵面的减少,潜艇的潜浮性能并无差异,但转向性能略有降低,横倾振荡及舵角抖动趋于严重。实际上,X舵具有较好的横倾控制能力,通过设计差动舵角控制律即可实现,从而提升在较少可用舵面以及潜艇强机动等情况下的操纵性能,对于此问题,后续将会进一步展开研究。
