大尺度高速水下无人艇控制系统设计与试验验证
2020-05-28王文晋王冠学李奔徐国华
王文晋,王冠学,李奔,徐国华
华中科技大学 船舶与海洋工程学院,湖北 武汉 430074
0 引 言
无人水下航行器(UUV)在越来越多的领域发挥着无可替代的作用。无人水下试验艇是一种特殊的无人水下航行器,它以按相似理论设计建造的潜艇自航模型为基础,可进行操纵性、快速性、隐身性等航行性能的综合试验。无人水下试验艇模拟得到的数据可靠直观,可以与拖曳水池、风洞拘束模型的试验结果相互验证、互为补充,且多数试验结果可移植到实际潜艇上,未来还能推广至无人潜艇,有助于推动无人潜艇发展,是一项值得发展的新技术[1-3]。
早在20世纪50年代,美国海军就研制了常规动力的“大青花鱼”号高速载人试验艇,其被认为是无人水下试验艇的前身[4]。其后,在70~90年代,美国海军基于在研的3型攻击核潜艇的各项性能指标,在研究论证阶段开发了3艘水下无人试验艇,为潜艇泵喷桨的设计、低噪声艇型水动力布局和操纵面设计及其他大量新技术以及新装备的验证提供了技术支撑[4-7]。我国从自主研制潜艇的初期就提出开发无人水下试验艇,至今已开展了一系列工作,主要以研仿和局部改进为主。其中,刘洋等[8]已完成试验艇操纵性常规验证试验,在制造技术、水下通信技术、实时轨迹跟踪技术、操纵性试验与数据处理分析技术等方面积累了经验。
本文研究的大尺度高速水下无人艇(以下称无人艇)是一种面向开展快速性和隐蔽性试验而研制的无人水下航行器,同时也是我国新一代潜艇自航模。该无人艇搭载的设备复杂多样,试验航速高,且试验时对航行器的位姿控制精度提出了较高要求,因此其控制系统及航行控制算法的设计是一项富有挑战性的任务。该无人艇的典型试验工况为路径跟踪,而海军工程大学研制的试验艇因试验航速较低且以操纵性试验为主[8],故不具备借鉴意义。为此,本文拟总结自主式水下航行器(AUV)的路径跟踪算法,一方面因其巡航航速较低,另一方面所采用的路径跟踪算法通常将其空间路径跟踪问题分解为水平面和垂直面的平面路径跟踪问题,而这种平面制导方法虽能实现既定的路径跟踪功能,但对于三维曲线路径跟踪任务而言,直接计算三维空间下的制导率是一种更好的选择。另外,本文所研究的水下无人艇需在较大的航速范围下试验,故要求制导率具备航速的自适应能力。为此,本文拟围绕该无人艇的控制系统,简要概括其功能及体系结构,阐述自适应三维空间制导与运动控制等关键技术的工作原理,并通过湖试及结果分析,展示该大尺度水下高速无人艇控制系统的性能。
1 无人艇概述
该无人艇模型由某型潜艇按一定比例缩比而成,总长约11 m,排水量约8 t,设计航速最高可达17 kn。作为推进器性能试验平台,采用锂电池作为整船动力,配备有待试验的新型推进器。另外,使用围壳舵、方向舵和分离式艉舵调节姿态,并搭载有高精度惯导系统、多普勒测速仪(DVL)、深度计、高度计和避碰声呐,可提供精确的导航信息,使无人艇能够在有限水域内安全航行。
无人艇还具备了水面无线遥控、光纤遥控和水下自主航行这3种工作模式,可完成试验任务要求的多种机动动作,例如水面直航、水面回转、定深直航等,同时还可对机动过程中的多项特征参数进行测量和记录。无人艇试验的基本过程如图1所示。
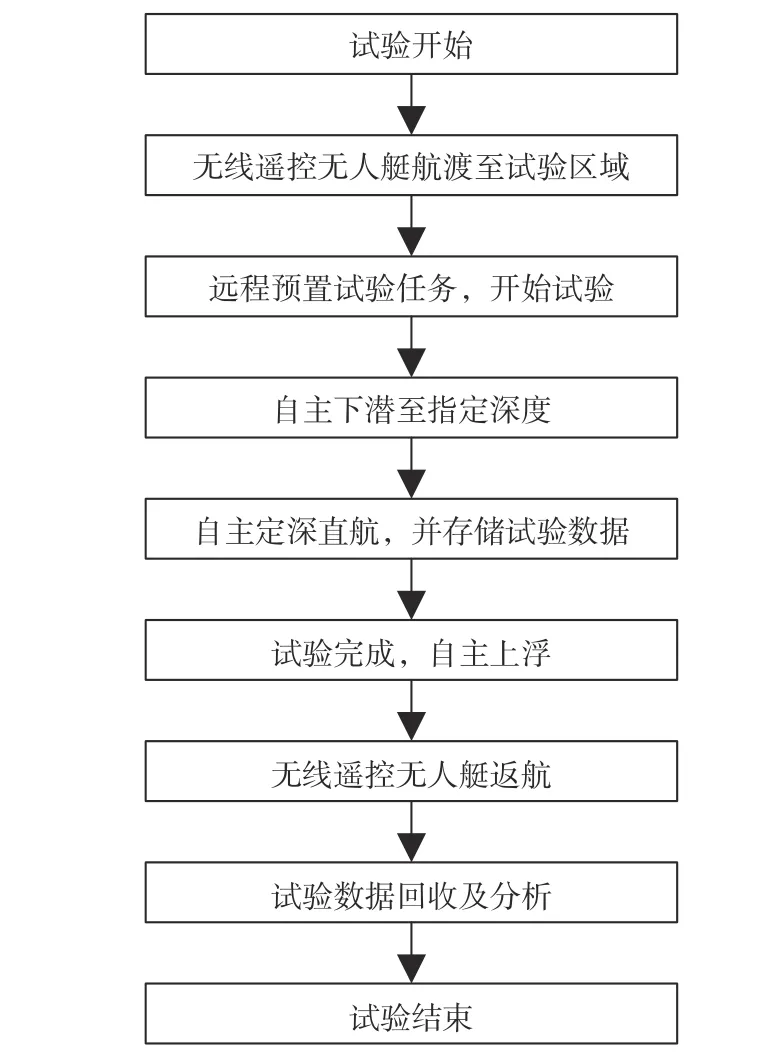
图 1 无人艇试验基本过程Fig. 1 Basic processdures of test for the UUV
无人艇排水量更大,航速是常规AUV的3~4倍,惯性增大将延长航行器的应舵时间,高航速则强化了航行器各自由度间的耦合,这些都增加了航行控制的难度。
2 控制系统结构
无人艇上设备数量众多,各设备接口形式不尽相同,为了有效管理设备,避免因使用单一控制器造成的负载过高问题,也为了提高硬件的模块化程度,按功能需求,分别设计了水下主控单元、导航单元、运动规划与控制单元、动力单元、基础控制单元、应急单元及水下数据存储单元。其中,应急单元在正常试验时可监测各设备运行状态,若诊断出故障且确认无人艇需中止试验,应急单元将取代水下主控单元并调度其他控制器完成应急自救。
正常工况下,无人艇控制系统以水下主控单元为控制核心,各功能单元在其调度下实现信息共享,并协调地进行工作。如图2所示,无人艇控制系统信息传递及工作流程分为5个步骤,对应图中的①~⑤。流程①表示水下主控单元查询基础控制单元、动力单元及导航单元获取实时舵角、转速和导航传感器的位姿信息;流程②表示水下主控单元将流程①查询所得信息发送至运动规划与控制单元;流程③表示运动规划与控制单元根据无人艇实时数据,解算出转速和舵角指令并发送至水下主控单元;流程④表示水下主控单元将舵角和转速指令分别发送至基础控制单元和动力单元;流程⑤表示水下主控单元将无人艇状态发送至应急单元进行故障诊断,并发送至水下存储单元存储。

图 2 无人艇控制系统结构框图Fig. 2 Structure diagram of control system for the UUV
3 航行控制原理
3.1 自适应制导
在进行无人艇路径跟踪时,引入了基于视线角(LOS)的自适应制导律,为航行器提供了符合操纵性特点的运动制导,同时为其在高速运动状态下的控制指令解算提供安全、可行的运动姿态调整依据。对于规划航迹的跟踪而言,可在参考航迹上选择一个虚拟目标点,该目标点不受时间的严格限制,可以协同增速或减速,以配合无人艇减小跟踪误差。这种不受时间直接影响提供额外自由度的思想,使得航迹跟踪系统具有了更强的鲁棒性,在高速航行时仍可保证平滑的运动轨迹,抵抗外部环境干扰且不会导致闭环控制系统失稳。


图 3 三维路径跟踪示意图Fig. 3 Diagram of path following in 3D space

根据式(1)给出的位置误差,设计如式(2)所示路径跟踪制导率。操舵行为,如果目标轨迹趋近于一条较陡的曲线,舵手会提前增大操舵角,使艇在高速航行情况下仍能适应轨迹变化方向而自动改变航向;如果需要跟踪一条直线,则渐近地减小操舵角,使艇平缓地趋近于直线航迹。因此,可通过规划航迹的曲率特性,自适应地改变视线制导的增益值,提高艇在高速运动时的控制性能。

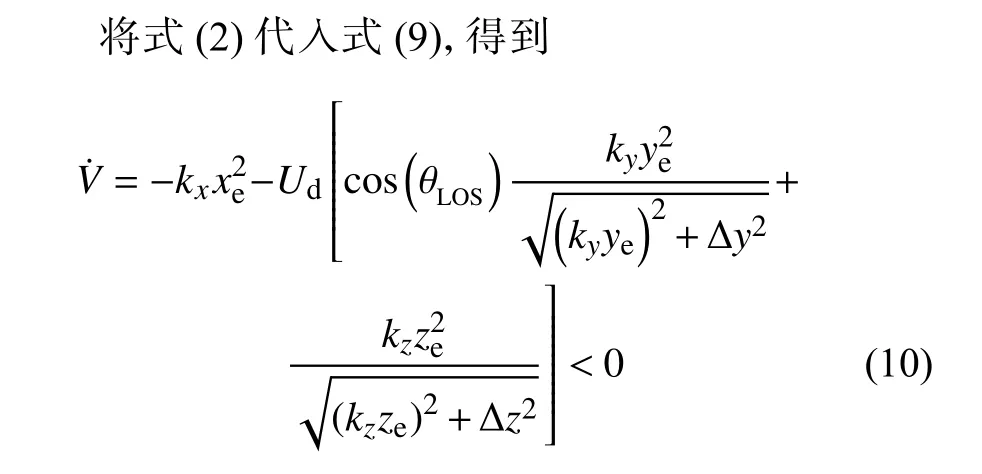
因此,可以证明在设计的制导率下,路径跟踪误差将收敛至零。
由于本文大尺度高速水下无人艇的试验航速跨度大,为6~17 kn,为了保证各航速下无人艇的路径跟踪能力,采用了模糊化思想调节制导增益,实现三维空间下自适应制导功能。设计的自适应制导增益为
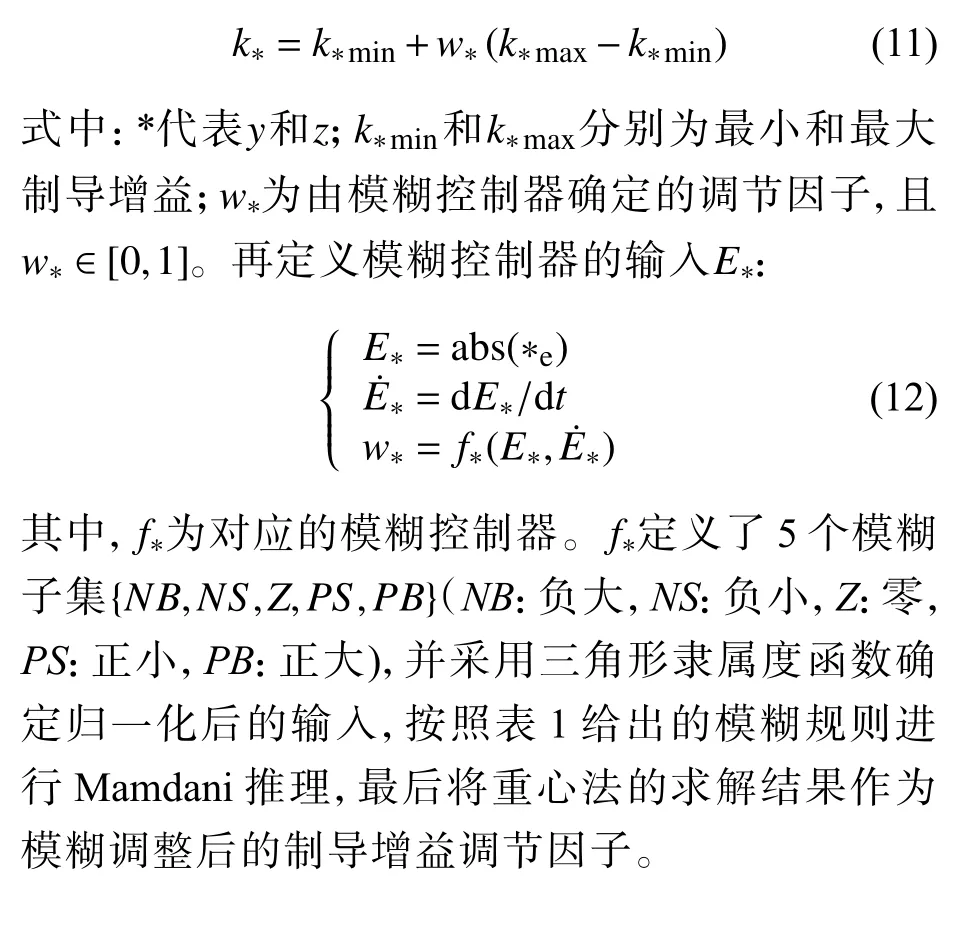
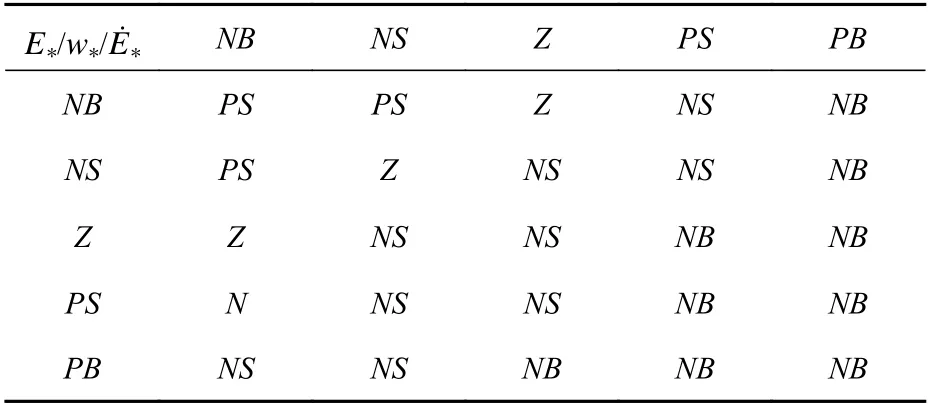
表 1 自适应制导率采用的模糊规则Table 1 Fuzzy control rules utilized for adaptive guidance law
3.2 运动控制
实际工程经验表明:对于左、右舷对称且大长宽比的细长型航行器,其运动可按纵向和横向运动进行分解,其中前向速度控制又可进一步从纵向子系统中解耦出来单独进行控制。因此,本文采用了解耦控制的方法,针对无人艇航速、航向、纵倾角和深度分别设计了单独的控制器,通过各控制器的配合,可保证无人艇完成航向保持、航向调节、深度保持、深度调节、定深直航和路径跟踪等各种试验动作。

综合前文给出的自适应制导方法及本节描述的运动控制算法,引入设定指令和状态反馈滤波器,得到航行控制系统工作原理图,如图4所示。
图4中所用的变量含义如表2所示。




表 2 控制算法变量定义Table 2 Variable definition in control algorithm

图 5 二阶滤波器结构框图Fig. 5 Structure diagram of second order filter
4 湖试结果分析
大尺度高速水下无人艇的航行试验在内陆某水库进行,试验水域及试验航道如图6所示。图中红色实线为无人艇完成试验动作的航道 ,为了预留足够的加速空间以达到指定的试验航速,无人艇需沿2条不同的航线自行往返于水库两端。试验时,首先将无人艇遥控至目标航线起点附近,然后设置无人艇为自主模式,切换成功后无人艇将在航行控制器的作用下趋近目标航线并下潜至试验深度,在即将到达目标航线终点时,无人艇将自动上浮并远程发送试验完成信号,等待下一次试验任务。
大尺度高速水下无人艇是航行性能综合试验平台,本文以推进器性能试验时的航行数据为基础,分析控制系统的各项性能。在进行推进器性能试验时,要求无人艇下潜至指定深度后,沿固定航向以固定转速稳定航行一段时间,期间尽可能少地出现姿态与舵角振荡。由于试验期间任何形式的姿态波动或操舵行为都将影响无人艇的航速及螺旋桨噪声,因此推进器性能试验对控制系统的航行控制能力要求颇高。
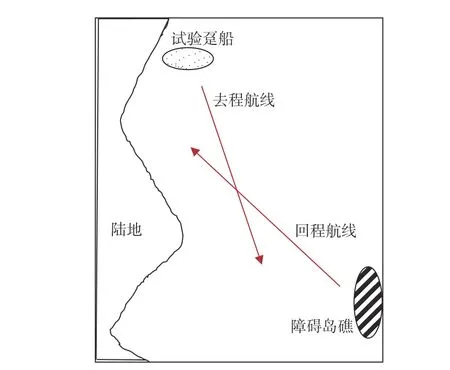
图 6 试验水域与航线示意图Fig. 6 Schematic diagram of test lake and routing
图7~图9为保障推进器性能试验而进行的定深直航试验结果,分别给出了6,9,13 kn试验航速下的实际航速、航向角、深度、纵倾角、路径跟踪结果及横向偏距。其中,航速图可表现航行控制器的航速控制能力;航向角、路径跟踪结果及横向偏距图可表现航行控制器的路径跟踪能力;深度和纵倾角图可表现航行控制器的深度控制能力。由图可见,无人艇航速控制稳定;航向角、深度及纵倾角的控制均存在超调和目标值附近的小幅波动;路径跟踪过程中,无人艇跟随目标航线左右游走。从试验结果可以看出:无人艇控制系统在设计的航行控制算法下,具备对无人艇的位姿调节能力,能够平滑稳定地控制无人艇趋近目标航线及深度,并以稳定的航速完成定深直航任务,满足推进器性能试验对位姿控制精度的要求。此外,航速、深度和路径跟踪控制在整个试验段表现稳定,体现出航行控制算法的鲁棒性。尽管航行控制算法的性能满足试验要求,但航向和深度的波动原因值得深入分析。首先,受限的操舵频率使得航行控制的难度增加,其次,方向舵传动装置中约2°的机械间隙影响了航向控制,无人艇的剩余浮力则影响了深度控制。以上因素导致了航行器在航行过程中的航向角和深度波动。然而,控制系统已尽可能地将以上不利因素对位姿控制精度的影响减轻到合理范围。
表3为试验情况定量分析结果,可见大尺度高速水下无人艇的航向控制偏差小于2°,深度控制偏差小于0.2 m,控制效果良好,满足了推进器性能试验相关的技术要求。

图 7 6 kn速度下定深直航试验结果Fig. 7 Test results of depth keeping in direct navigation at 6 kn
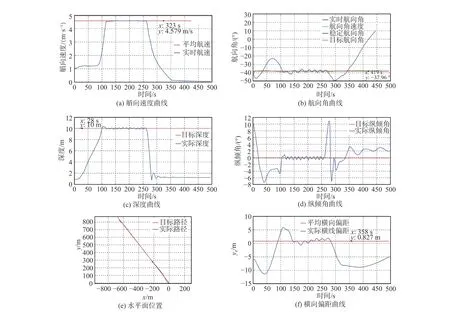
图 8 9 kn航速下定深直航试验结果Fig. 8 Test results of depth keeping in direct navigation at 9 kn

图 9 13 kn航速下定深直航试验结果Fig. 9 Test results of depth keeping in direct navigation at 13 kn
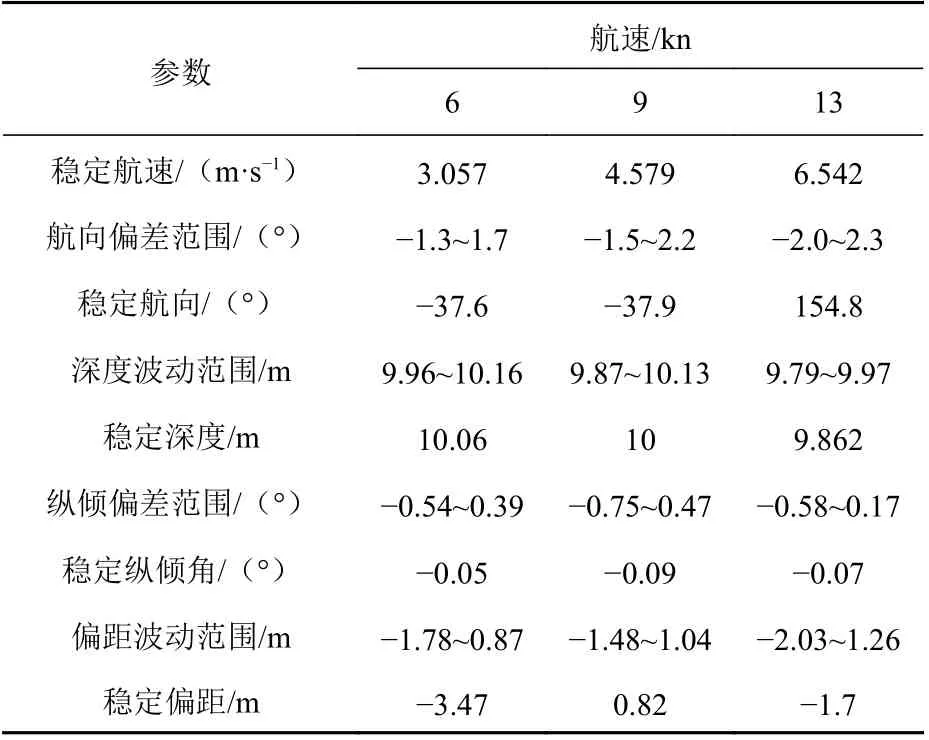
表 3 航行试验结果分析Table 3 Analysis results of navigation test
5 结 语
本文所述大尺度高速水下无人艇是为了开展潜艇操纵性、快速性、隐身性等试验而研制的一种特殊的无人水下航行器,在分析无人艇执行机构、传感器等硬件配置的基础上,提出了一套以水下主控单元为核心,并按功能配备导航单元、运动规划与控制单元、动力单元、基础控制单元、应急单元及水下数据存储单元的控制系统架构。面向无人艇作为综合试验平台的任务需求,本文设计了一种模糊自适应制导方法,以使无人艇在所有试验航速下均能平滑地完成三维路径跟踪任务。考虑到无人艇惯性大、航速高的特点,本文基于积分分离思想分别设计了航速、航向、深度及纵倾角PID控制器,指令和状态滤波器的引入则避免了无人艇在高速运动时因指令突变引发的输出饱和、大幅超调甚至振荡现象,从而改善了无人艇的动态响应特性。湖试结果表明,无人艇航行控制算法具备对无人艇的位姿控制能力,其表现稳定并具有鲁棒性,对新一代无人试验艇运动控制技术的研究有一定的参考意义。
