不同路况下路面附着系数实时估计
2020-05-26王健杨君于蓬李爱娟魏添
王健 杨君 于蓬 李爱娟 魏添

摘要:为了准确估计不同路况下的路面附着系数,提高汽车行驶的安全性与稳定性,提出了一种在制动工况下基于前后轮轮速和制动力矩估计路面附着系数的方法。首先,考虑汽车前后轴荷转移,在Matlab/Simulink软件中完成建模操作,创建关于双轮车辆制动的动力学模型;其次,将控制目标确定为汽车前轮以及后轮的理想和实际滑移率,建立理想制动力矩滑模控制器,对于汽车滑模控制器存在的抖振现象,通过积分切换面对其进行处理;最后,以前后轮轮速和制动力矩作为输入进行扩张状态观测器的设计,利用这一观测器观测路面附着系数相关值。结果表明,各种路况中的路面附着系数都可以通过上述手段进行准确估计,扩张状态观测器能够抵抗外界干扰,鲁棒性强。将扩张状态观测器用于路面附着系数识别的良好结果可为汽车稳定性控制系统的设计提供参考。
关键词:车辆工程;路面附着系数估计;线性扩张状态观测器;外界干扰;不同路况
中图分类号:U461.1文献标识码:A doi:10.7535/hbkd.2020yx02007
汽车中的先进驾驶员辅助系统如自适应巡航控制(adaptive cruise control,ACC)、防抱死制动系统(anti-lock braking system,ABS)、驱动力控制系统(traction control system,TCS)和电子稳定程序(electronic stability program,ESP)等,令汽车在行驶过程中变得更加稳定和安全。要想做好安全控制工作,首先必须得到精确的路面附着系数,然后利用先进驾驶员辅助系统来调整控制逻辑,使控制系统的性能充分展现。
当前附着系数的检测主要有以传感器为基础的两類手段。第一类是Cause-based手段,它按照路面的两方面情况(具体形态和物理特征)来识别具体的附着系数。识别时,它会通过光学传感器对路面的两种情况(吸光情况和散射光情况)进行测量。这一手段的优势是直接、操作简单,缺点是传感器价格高,无法应用于量产车中。第二类是Effect-based手段,它按照车辆动力学响应对附着系数进行估算。这一手段的优势是车载传感器得到充分运用,花费成本少。文献[7-10]在估计汽车纵向力时,使用的是卡尔曼滤波器,利用两类情况(CUSUM变化和通过RLS法计算得到的值)估计附着系数。文献[11]在估计附着系数时,使用的即是卡尔曼滤波算法。文献[12]先通过建立1/4车辆制动动力学模型,然后通过扩张状态观测器得到附着系数的大概值。和卡尔曼滤波等算法相比,此方法不但能够确保准确度,还不用对复杂Jacobian矩阵进行求解。
本文考虑车辆制动过程中的前后轴荷转移,创建关于双轮车辆制动的动力学模型,将控制目标确定为汽车前轮以及后轮的理想和实际滑移率,完成滑模控制器的创建操作,对汽车滑模控制器存在的抖振现象,通过积分切换面进行妥善处理,再进行扩张状态观测器的设计,利用观测器观测路面附着系数相关值。与文献[8]相比,该方法考虑前后轴荷转移对附着系数估计的影响,设计参数更少,计算效率更高。
1双轮车辆制动动力学模型
1.1整车模型
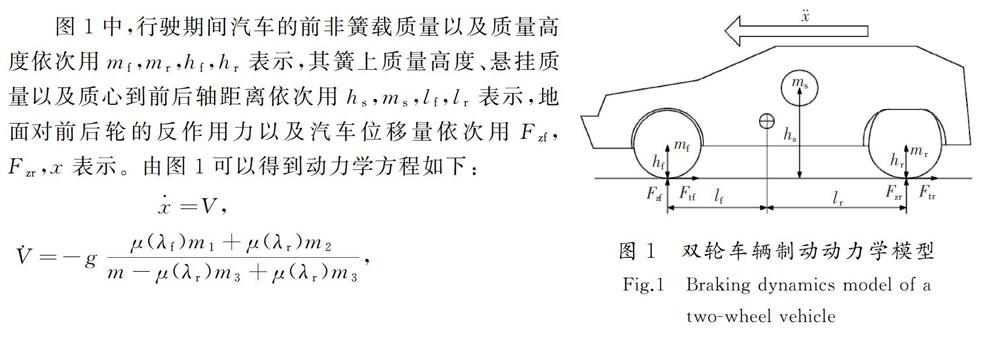
当对行驶的汽车进行动力学分析时,需要提出4个假设,即汽车受到的4个方面影响可以被忽略。这4个方面影响首先是3类系统带来的影响,即悬架系统、传动系统、转向系统;其次是轮胎滚动以及空气阻力带来的影响;再者是轴荷侧向转移的影响;最后是路面平整度的影响。
4.2路面附着系数估计
利用线性扩张状态观测器估计路面附着系数时,需要按照系统输出跟踪目标两方面情况对观测器的带宽进行调整,这两方面情况首先是稳态要求,其次是速度要求。此处带宽和响应速度成正比关系,但必须确保带宽不会太高,否则系统便会出现超调震荡的情况。针对之前仿真时的2类路面情况,此处观测器带宽取值为100,当汽车在干沥青路面行驶时,路面附着系数具体值如图9所示。
当路面一段为湿沥青、一段为雪地时,汽车在这两类路面过渡时的路面附着系数见图10。
由上述仿真结果可知,通过线性扩张状态观测器可以对路面附着系数进行精确估计。汽车制动期间,轮速信号中通常存在白噪声,此时假设白噪声均值和方差分别为0和1,当观测器参数固定时,估计对接路面附着系数,具体结果如图11所示。
通过图11可知,当轮速传感器信号中有白噪声时,可以通过线性扩张状态观测器估计路面附着系数。此时估计值存在噪声干扰,要消除这一干扰,需要对其进行滤波处理,图12显示了具体结果。
由图12可知,路面附着系数得到滤波处理后,估计值和实际值更加接近,但滤波处理后,路面附着系数估计值出现了延迟问题。
5结论
本文考虑汽车前后轴荷转移,将控制目标确定为汽车前轮以及后轮的理想和实际滑移率,然后完成滑模控制器的设计。在进行二阶线性扩张状态观测器的设计时,提出将前后轮轮速和制动力矩当作该观测器的输入,利用这一观测器来观测附着系数相关值。结论如下:1)以双轮车辆制动动力学模型为基础,通过线性扩张状态观测器估计路面附着系数值,方法简单可行;2)采用饱和函数及积分切换面能够消除滑模变结构控制抖振问题;3)线性扩张状态观测器的观测能力较强,同时具有良好的鲁棒性。当汽车在不同路况行驶时,路面附着系数都能够通过上述方法进行估计。扩张状态观测器能够抵抗外界干扰,鲁棒性强。本文未开展不同路面上路面附着系数估计的实车实验,今后将继续采用线性扩张状态观测器对汽车的转向工况以及转向、制动联合运行工况下的路面附着系数进行实时估计,为车辆稳定性控制系统的设计提供参考。
