仿生原型毫一微牛级二维力测试系统研制
2020-05-26李云鹏王立新闫世兴董世运
李云鹏 王立新 闫世兴 董世运

摘要:為满足机械仿生学研究对测试仿生原型产生的毫一微牛级力的需要,构建了二维力测试系统。系统硬件部分主要包括自行研制的平行双簧片悬臂梁及其匹配的电涡流位移传感器、实现测试功能及测试样本简便更换的附属机构、测力传感器输出信号调理模块与能够完成A/D转换的数据采集卡,基于虚拟仪器技术LabVIEW编写了数据处理与界面显示程序。为检验系统的功能,进行了系统的运行调试并测试了仿生原型产生的摩擦力、法向力、刺穿阻力。结果表明,系统能够准确采集仿生原型的毫一微牛级力,并能在界面窗口实时、直观地显示,实现了毫一微牛级力的数据信息保存,测试精度可达50uN,量程可达800mN。因此,所设计系统能够精确测试仿生原型产生的毫一微牛级二维力,为机械仿生学研究提供了所需的测力技术与方法。
关键词:传感器技术;机械仿生;仿生原型;毫一微牛级力;LabVIEw
中图分类号:S433.2;TH823 文献标识码:A doi:10.7535/hbkd.2020yX02001
在机械仿生学领域,仿生原型产生的毫一微牛级力测试是不可缺少的环节,诸如以猪笼草叶笼滑移区为仿生原型研制致灾农业昆虫捕集滑板,需要测试飞蛾、蚂蚁、蝗虫等致灾农业昆虫在滑移区、捕集滑板等表面的附着力、摩擦力。对于上述力的测试,需要研制专门的测试系统,以在精度、量程、样本简便更换等方面符合需求。文献已公开的二维力测试系统能够同时测量水平、竖直方向的力,但该传感器在2个方向的分辨力均为9.8mN,比较适合测试壁虎等体型较大动物爬行过程中足底与表面的接触力,对于飞蛾、甲虫等体型较小仿生原型产生的附着力、剪切力,该测力系统在测试精度方面不能满足要求。以测力传感器为核心部件构建的昆虫附着力测力系统能够实现毫牛级力测试,但不能精确测试体型较小仿生原型产生的微牛级力,且测试样本固定平台及附属机构过于简单,容易产生误差。基于离心原理构建的离心式测微力系统,通过仿生原型在测试圆台的离心运动来实现对毫牛级附着力、摩擦力的测试,该类型测力系统的量程、精度不受测力传感器限制,比较适合蚂蚁、飞蛾等体型较小的仿生原型,但离心运动半径信息的准确获取需要价格昂贵的高速成像系统。东南大学王玉娟团队采用手动悬臂移动法模拟单根刚毛与猪笼草叶笼滑移区蜡质区表面接触,测试其表面的黏附力、摩擦力,用以研究猪笼草叶笼滑移区的反黏附特性,为仿生反黏附表面设计和制备提供理论依据。通过摄像机连续拍摄仿生原型与附着面的微小变形,再基于图像处理分析获取微小变形的具体值,从而间接测出微一纳牛级接触反力,该类型测力系统的分辨率可高达纳牛级且不损坏仿生原型,比较适合水黾、水蜘蛛等水生动物的附着力测试。
现有的测力系统在测试量程、测试精度、测试样本固定平台等方面并不能同时符合多种类仿生原型产生的毫一微牛级力测试需求,因此,本文给出了一种毫一微牛级二维力测试系统,硬件部分主要包括自行研制的平行双簧片悬臂梁及其匹配的电涡流位移传感器、实现测试功能及测试样本简便更换的附属机构、测力传感器输出信号调理模块与能够完成A/D转换的数据采集卡,软件部分主要为基于虚拟仪器技术LaBVIEW编写的数据处理与界面显示程序。
1毫-微牛级二维力测试系统原理
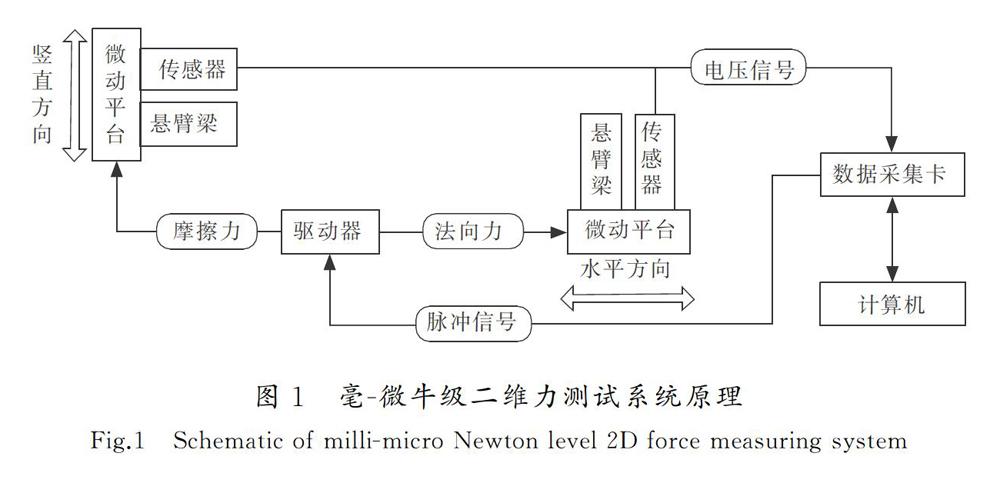
毫-微牛级二维力测试系统主要由水平、竖直测力传感器、微动平台及附属机构、完成A/D转换的数据采集卡、数据处理与实时显示界面程序等5部分组成(见图1)。计算机通过串口与数据采集卡通信,数据采集卡接收信号后由数字输出端口发出脉冲到步进电机驱动器,通过控制步进电机实现微动平台水平、竖直方向的运动。当水平、竖直微动平台带动各自悬臂梁的测试样本平台相互接触时,悬臂梁与电涡流位移传感器的间距变小并产生电信号,传感器输出的电信号经信号调理模块的滤波、放大处理后输入到数据采集卡,数据处理与实时显示界面程序获取数据采集卡输出的数字信号并将其通过胡克定律转换成毫一微牛级力,在界面窗口实时显示。
2毫-微牛级二维力测试系统硬件设计配置
2.1测力传感器设计
测力传感器由平行双簧片悬臂梁、电涡流位移传感器2部分组成。平行双簧片悬臂梁由平行双弹簧片与半圆弧连接块组成。选用强度高、抗弹减性能较好的65Mn弹簧钢作为平行弹簧片材料;选用45#钢作为半圆弧连接块材料,其表面作为电涡流位移传感器感应面。平行双簧片悬臂梁与电涡流位移传感器均固定于微动平台上,未受到作用力时,两者保持相对静止;平行双簧片悬臂梁受到垂直于感应面的力,电涡流位移传感器与感应面之间的距离(位移)发生变化并由电涡流位移传感器测出,根据胡克定律可计算出毫一微牛级力。
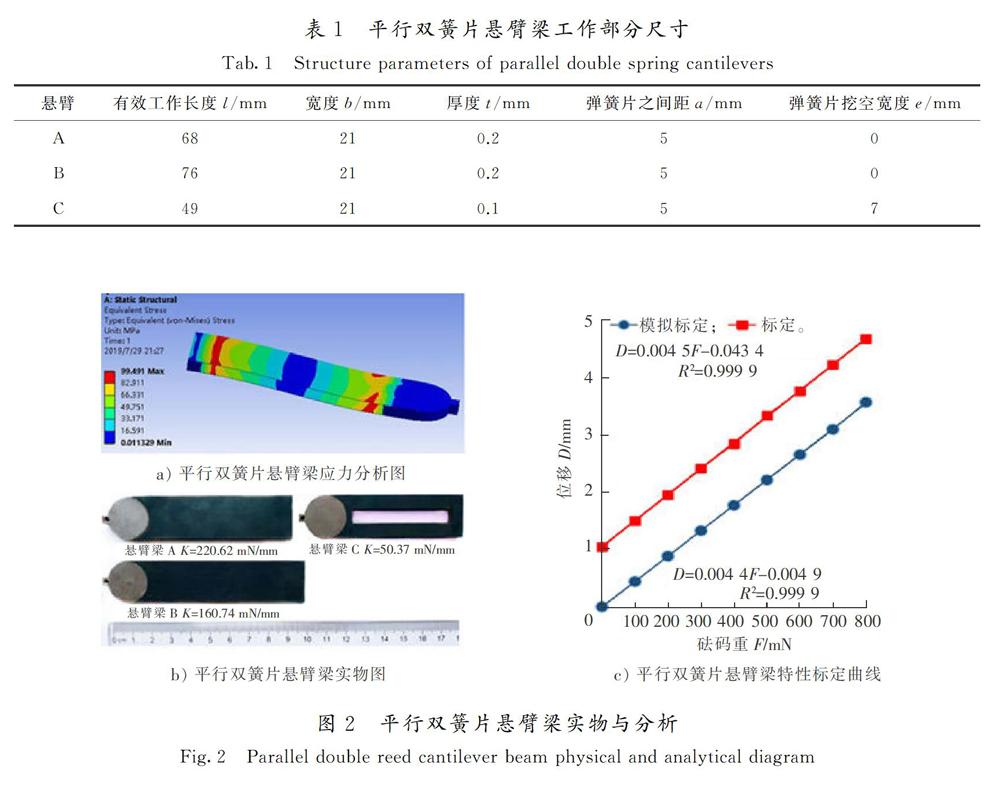
由于仿生原型多为动植物样本,其体表形貌结构多为微纳尺度,极易遭受破坏,加载的接触压力多在0.01~2N,因此所设计的测力传感器应具有较小的量程、较高的精度,还应具有良好的重复性、动态性,能够准确、实时测试仿生原型产生的毫一微牛级力。设计的3个不同弹性系数的平行双簧片悬臂梁尺寸如表1所示,根据表中尺寸利用Solidworks软件对平行双簧片悬臂梁进行建模,随后采用ANSYS软件的Work-bench模块进行模拟标定与应力分析(见图2a)),最终获取的弹性系数分别为220.62,160.74和50.37mN/mm(见图2b))。为验证所设计的平行双簧片悬臂梁是否符合要求,选择弹性系数为220.62mN/mm的平行双簧片悬臂梁进行加载标定,从0~800mN每间隔100mN连续加载,采用美国Mastech的万用表MS8218分别测得加载后电涡流位移传感器输出的电压值,标定过程中的室温和相对湿度分别为28℃和55%。采用最小二乘法进行拟合,获取平行双簧片悬臂梁特性曲线(见图2c)),拟合优度R2=0.9999,表明所研制的测力传感器具有较高的线性度。ANSYS模拟分析结果显示,平行双簧片悬臂梁的最大应力为99.5MPa,显著小于65Mn弹簧钢的屈服强度450MPa,预示研制的平行双簧片悬臂梁不易发生塑性变形。
电涡流位移传感器感应其与平行双簧片悬臂梁之间的距离变化并将之转换为线性电压,应具有测试精度高、线性度好,可实现微动测量等特点。选用上海振迪检测技术有限公司生产的电涡流式位移传感器ZD-260,其探头直径4mm,线性范围0.50~4.5mm,分辨力1um,能够确保系统测试精度。电涡流位移传感器位移一电压曲线方程为
制备的3个平行双簧片悬臂梁,由标定结果(见图2b))获知,弹性系数分别为220.62,160.74和50.37mN/mm;选用的电涡流位移传感器ZD-260分辨率为1gm,由此可得,测力传感器的分辨力分别为220,160和50uN,对应的量程分别为800,640和200mN。采用上述平行双簧片悬臂梁及对应的特性方程,可完成仿生原型产生的附着力、摩擦力、法向力、刺穿阻力等毫一微牛级力测试,平行双簧片悬臂梁的选取根据所要测试微力的量程范围而定。
2.2测试平台及附属机构
如图3所示,测试平台及附属机构配合测力传感器,实现对仿生原型产生的附着力、法向力、摩擦力、刺穿阻力等毫一微牛级二维力的测试,并能实现测试样本(1cm×1cm)的简便置换。该毫一微牛级二维力测试系统硬件部分主要包括测力传感器(平行双簧片悬臂梁、电涡流位移传感器)及过载保护机构、测试平台、电源模块、数据采集卡、步进电机及驱动器,软件部分为基于虚拟仪器技术LabVIEW编写的数据处理与界面显示程序。水平丝杠滑块移动带动安装在水平测试样本固定平台的测试样本移动,使其接触安装在竖直测试样本固定平台的测试样本,以此使水平平行双簧片悬臂梁A产生弹性形变,与之配合的水平電涡流位移传感器采集该位移(弹性形变)信息并输出电压,代入式(3)获取加载在水平测试样本与竖直测试样本间的法向力。随后,安装在竖直测试样本固定平台的测试样本在竖直丝杠滑块移动作用下向上移动,竖直平行双簧片悬臂梁B或C产生弹性形变,与之配合的竖直电涡流位移传感器采集该位移(弹性形变)信息并输出电压,代人式(4)或式(5)获取加载在水平测试样本与竖直测试样本间产生的摩擦力。
2.3信号调理模块与数据采集卡选择
电涡流位移传感器感应微小位移变化并将其转换成夹杂干扰噪声的毫伏级电压信号,信号调理模块可对其进行去噪、滤波、放大等处理,转换成数据采集卡能够识别的电压信号。经过比较分析,选择美国NI公司的信号调理模块SCXI-1520调理传感器输出信号,其具有8路同步采样模拟通道,激励电压为0~10V,增益高达1000。
将经信号调理模块处理的电涡流位移传感器输出信号输送至数据采集卡,用以转换成数字信号,便于毫一微牛级二维力信息采集系统的分析处理。为使毫一微牛级二维力测试系统的精度达到要求,选择美国NI公司的数据采集卡USB-6351,其具有16路模拟输入通道,24条数字I/0线,输入/出电压范围为±10V,输出/人分辨率为16bit,采样频率可达1.25MHz,能够确保系统测试精度不受数据采集卡分辨率的影响。
3毫一微牛级二维力测试系统数据处理与界面显示程序编写
3.1LabVIEW软件简介
基于虚拟仪器技术及其开发语言LabVIEW编写了毫一微牛级二维力信息采集系统的数据处理程序及实时显示界面。LabVIEW是虚拟仪器领域应用最广泛、功能最强大的图形化软件开发平台,采用强大的图形化G语言编程,可创建32位的编译程序,编程简便,人机交互界面直观友好,具有强大的数据可视化分析功能,成为仪器开发领域备受欢迎的软件平台,广泛应用于采集、测量、控制等领域[22-26]。
3.2数据处理与界面显示程序设计与功能
利用LabVIEW编写的数据处理与界面显示程序应以直观、简便、有效地显现仿生原型产生的附着力、摩擦力、法向力、刺穿阻力等毫一微牛级力的实时变化为准则。该程序由参数输入与控制界面、信息采集界面2部分组成(见图4)。参数输入与控制界面的主要功能为选择通道、调整测力传感器初始位置、参数输入、数据采集及数据存储等。信息采集界面主要由摩擦力信息采集窗口、法向力信息采集窗口与摩擦系数信息显示窗口3部分组成。信息采集显示界面的横坐标是采样时间,纵坐标是仿生原型产生的毫一微牛级力。参数输入与控制界面中的按钮都被赋予特定功能;移动指示灯和采集指示灯在信息采集过程中会由暗绿色变为鲜绿色,可判断测试样本是否正常移动与信息是否正常采集。
对于法向力、摩擦力的测试,水平测试样本固定平台放置猪笼草叶笼滑移区,竖直测试样本固定平台放置蝗虫爪尖。通过调节水平、竖直测试样本固定平台位置,使其处于同一水平面并达到适合测试法向力、摩擦力的最佳距离。测试过程中,水平丝杠滑块移动施加法向力,竖直丝杠滑块竖直移动产生摩擦力,分别通过电涡流位移传感器获取因法向力、摩擦力导致的位移变化而产生的电压信号,经信号调理模块和数据采集卡A/D转换,输送至数据处理与实时显示程序的电压一法向力转换式(3)与电压一摩擦力转换式(4)或式(5)后,还原成能够在界面窗口实时显示的法向力、摩擦力(见图5)。
对于刺穿阻力的测试,水平测试样本固定平台放置钩刺,竖直测试样本固定平台放置被刺穿样本。水平丝杠滑块水平移动使钩刺与被刺穿样本接触,从而使平行双簧片悬臂梁产生弹性形变,与之配合的水平电涡流位移传感器采集该位移(弹性形变)信息并输出电压,经毫一微牛级二维力信息采集系统,将采集的数据绘制成刺穿阻力曲线。测试结束后,需将采集的数据组、微力曲线保存至文件夹。基于上述分析,制定了毫一微牛级二维力测试系统数据处理与界面显示程序功能流程(见图6)。
由图6可知,开始微力测试时,点击显示界面电源开关,数据采集卡与参数输入界面完成初始化并新建任务;调整测力传感器初始位置,使测试样本固定平台处于同一水平面上并达到适合测试微力的最佳距离。在参数输入框中输入所需参数,而后对电涡流位移传感器电压信号模拟量按照既定的输入参数采集,数据处理程序将采到的数字量按式(3)、式(4)或式(5)转换成实时变化的法向力、摩擦力和刺穿阻力等微力并以曲线形式实时显示于界面窗口。测试过程中,点击停止按钮可暂停图像采集,此时会显示当前法向力、摩擦力的最大/最小值;点击采集按钮继续采集微力信息;点击清除按钮,所采集的图像、数据便会清空。测试结束时,点击数据记录按钮,可将所绘制的微力轨迹图及所采集的微力数据组保存至指定路径,最后关闭显示界面并结束数据采集任务。
4毫-微牛级二维力测试系统的调试运行
针对设计的毫一微牛级二维力测试系统,进行了法向力、摩擦力、刺穿阻力的测试以检验系统功能。首先进行法向力、摩擦力测试,分别测试蝗虫爪尖在猪笼草叶笼滑移区、砂纸(1200目,即3.5~5um)表面的摩擦力。将电涡流位移传感器紧固到距离平行双簧片悬臂梁表面3~4mm的位置,采用双面胶将蝗虫爪尖粘贴到竖直平行双簧片悬臂梁右侧的样本固定平台上,将猪笼草叶笼滑移区(砂纸)粘贴到水平平行双簧片悬臂梁左侧的样本固定平台上。随后调整测试样本固定平台,使其处于同一水平面并达到适合测试法向力、摩擦力的最佳距离。设定数据采集卡的采样频率为100Hz,设定整个测试过程的采样时间为60s,运动速度为0.04mm/s,测试距离为2mm。准备就绪后,接通电涡流位移传感器、信号调理模块SCXI-1520、数据采集卡USB-6351等部件的工作電源,开启毫一微牛级二维力信息采集系统界面,开始蝗虫爪尖在猪笼草叶笼滑移区(砂纸)表面的摩擦力测试。测试过程中,电涡流位移传感器将采集到的电压信号经数据采集卡完成A/D转换后输送至毫一微牛级二维力信息采集系统,经式(3)、式(5)转换成曲线并在显示界面实时显示(见图7a)b))。测试结束后,毫一微牛级二维力信息采集系统对所采集的数据进行运算比较,获取测试过程中猪笼草叶笼滑移区最大摩擦力为17.41mN,砂纸最大摩擦力为10.36mN,并将数据分别以.jpeg和.txt格式保存到指定文件夹。
仿生低阻力注射器、伤口缝针研究过程中需要测试仿生原型穿刺软组织时的阻力,通过与现有医用针头刺穿阻力对比,分析其模型机理,为具有减阻、减痛功能的仿生缝针研制提供理论依据。对于刺穿阻力的测试,以酸枣树钩刺、动物肝脏为测试原型,采用双面胶将酸枣树钩刺粘贴到水平平行双簧片悬臂梁左侧的样本固定平台上,将动物肝脏粘贴到竖直平行双簧片悬臂梁右侧的样本固定平台上。调整2个平行双簧片悬臂梁的相对位置,使其处于同水平面并达到适合测试刺穿阻力的最佳距离。设定数据采集卡采样频率为100Hz,采样时间为60s,运动速度为0.05mm/s,测试距离为3mm。准备就绪后,接通工作电源,开启毫一微牛级二维力信息采集系统界面,开始酸枣树钩刺刺破动物肝脏表皮过程的刺穿阻力测试。测试过程中,电涡流位移传感器将采集到的电压信号经数据采集卡完成A/D转换后输送至毫一微牛级二维力信息采集系统,经式(4)转换绘制成曲线并在显示界面实时显示(见图7c))。测试结束后,毫一微牛级二维力信息采集系统对所采集的数据进行运算比较,获取测试过程中最大刺穿阻力为329.76mN,并将数据分别以.jpeg和.txt的格式保存到指定文件夹。
5结语
基于机械仿生学领域对仿生原型产生的毫一微牛级力精准测试的需求,研制了毫一微牛级二维力测试系统。硬件部分主要包括自行研制的平行双簧片悬臂梁及其匹配的电涡流传感器、信号调理模块与数据采集卡,软件部分为基于虚拟仪器技术LabVIEW编写的数据处理与界面显示程序。运行结果表明,该系统能够准确采集仿生原型产生的毫一微牛摩擦力、法向力、刺穿阻力,并能实时、直观地显示在界面窗口,实现曲线、数据等信息的保存,测试精度可达50uN,量程可达800mN,可为机械仿生学研究提供所需的测力技术与方法。本研究的不足在于所设计的平行双簧片悬臂梁,因其微牛级测试精度而导致双簧片厚度仅为100~200um,极易遭受温度、振动等外界因素的干扰,在一定程度上影响测试的准确度,因此后续研究需要关注该测力系统的测试准确度与稳定性的提升方法。
