基于多标度层次分析法的无人机避让策略构建
2020-05-26甄然牛辰辉吴学礼
甄然 牛辰辉 吴学礼
摘要:针对未来同一片空域内由于多种航空器共同执行任务而可能出现的飞行安全问题,通过研究各种可能出现碰撞的情景,构建了大型无人机在混合空域中最优避让方案评价指标体系,通过分析不同标度法的优缺点,提出一种多标度层次分析法的混合空域策略。首先,以大型无人机为研究对象建立混合空域模型,将混合空域中出现与本机发生冲突可能性的各种飞鸟或航空器进行分类,并考虑碰撞风险等级及目标执行任务等级因素。其次,采用多标度层次分析法求得不同情况下各类避让目标的权值,经过一致性判定;进一步引入隶属度函数,通过分析已获得的权值,对最终结果进行进一步的权重修正。最后,对大型无人机在空域中飞行可能遇到的空域环境进行分析,以验证无人机避让决策方案是否行之有效。结果表明,确定的基于多标度层次分析法可以满足无人机在面对复杂空域环境时避让策略方案的确立,并且具有动态效果,满足无人机实时构建和调整避让策略需要。研究结果可为实现大型无人机在混合空域中的安全飞行提供新的思路。
关键词:决策论;混合空域;指标体系;层次分析法;标度法;避让策略
中图分类号:V279 文献标识码:A doi:10.7535/hbkd.2020yXO2002
随着无人机技术的日趋成熟及空域的逐步开放,越来越多的无人机被应用于军民领域当中,研究拥有长续航能力的高空大型无人机已成为趋势,大型无人机与有人机在同一空域执行任务成为可能,但随之也带来空中交通流量趋于饱和等问题。同时,随着空中无人机数量的增加,飞行冲突相继增多,安全事故也会随之增多,严重影响大型无人机在混合空域中的安全飞行。
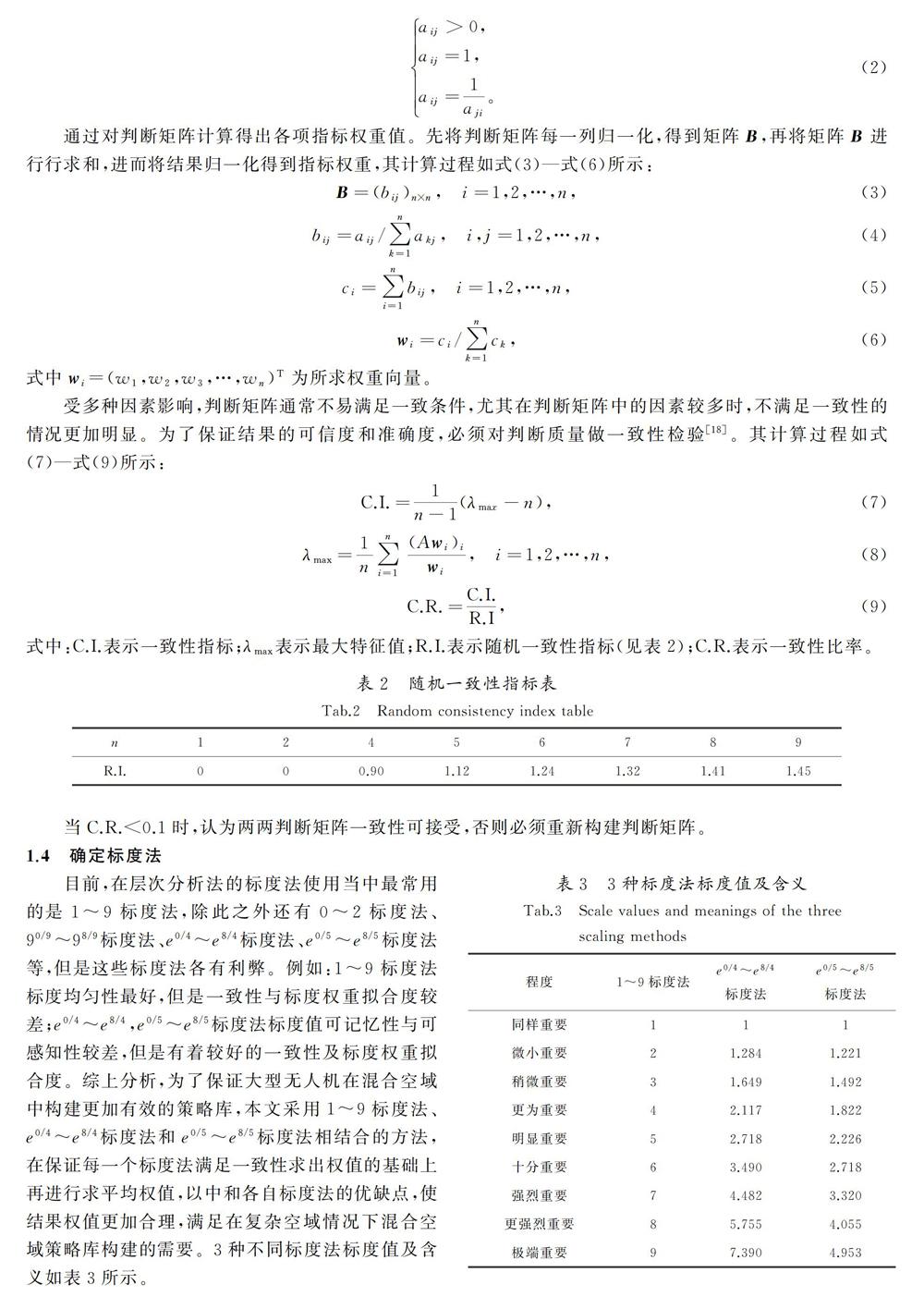
在复杂空域环境下,由于无人机机动性能更好、智能等级更高,因此更需要去避让其他航空器。而避让其他不同航空器或者鸟类的优先级属于多准则决策问题,在面临复杂多准则决策问题时多选择层次分析法,该方法将复杂的问题划分为多目标、多层次的相互关联因素,进而进行定性和定量分析,在求解具有复杂结构的目标因素及必要数据不足的多标准决策问题时,具有很好的效果。层次分析法与其他方法不同的是不直接评判目标问题和因素的重要性,而是构建一个判断矩阵,将因素指标进行两两比较以增强结果说服力。目前层次分析法多应用于各种复杂的决策问题,并取得了很好的效果。在层次分析法中选取不同的标度通常有着不同的效果。骆正清等详细分析了不同标度法各自的优缺点,徐泽水对多种标度法进行了评估。标度法的选取在一定程度上决定层次分析结果的精确度。
本文提出一种多标度层次分析法,通过分析各类标度法的利弊,选取3种不同的标度法并结合求权值方法,以保證大型无人机在混合空域中构建更加有效的避让策略。根据实际设想,引入隶属度函数,使最终计算结果更加贴合实际。最后进行实例仿真验证,结果表明,该方法具有一定的动态效果,达到了预期目的。
1模型构建和模拟方法
1.1混合空域
混合空域具有复杂结构,可允许航空器共同在同一空域内执行任务。以大型无人机为研究对象,将大型无人机称作本机,将威胁大型无人机飞行安全的航空器及鸟类称作目标物,并通过目标物、碰撞风险等级、执行任务等级3个方面构建出混合空域模型。
目标物方面:混合空域内的航空器主要由军用飞机、公共用途飞机、通用飞机、鸟类、轻于空气的航空器等组成。将在混合空域中出现的飞行器进行列举,其类型包括战斗机、运输机、教练机、直升机、客机、私人飞机等。
碰撞风险等级方面:对大型无人机与目标碰撞风险进行评估分类,国内外许多学者对飞行器的碰撞风险等级做了深入探讨。主要方法是通过建立航空器碰撞风险模型,考虑到航空器之间传递信号的延迟、位置误差、相对速度波动等因素,构建航空器保护区,该保护区表示在当前飞行环境下航空器与障碍物之间的最小安全范围。正常情况下,保护区内不存在任何障碍物,一旦保护区被其他障碍物入侵,则表示航空器发生了碰撞事故。无人机的风险评估最终要获得对风险的量化结果,本文中将其他学者对无人机风险评估的研究成果当作已知条件来使用。将碰撞风险分为远期碰撞风险、中期碰撞风险、近期碰撞风险并作为指标层。
执行任务等级方面:在得知目标飞行物飞行任务的前提下,将飞行任务分为自由飞行、执行普通任务、执行重要任务、执行紧急任务。
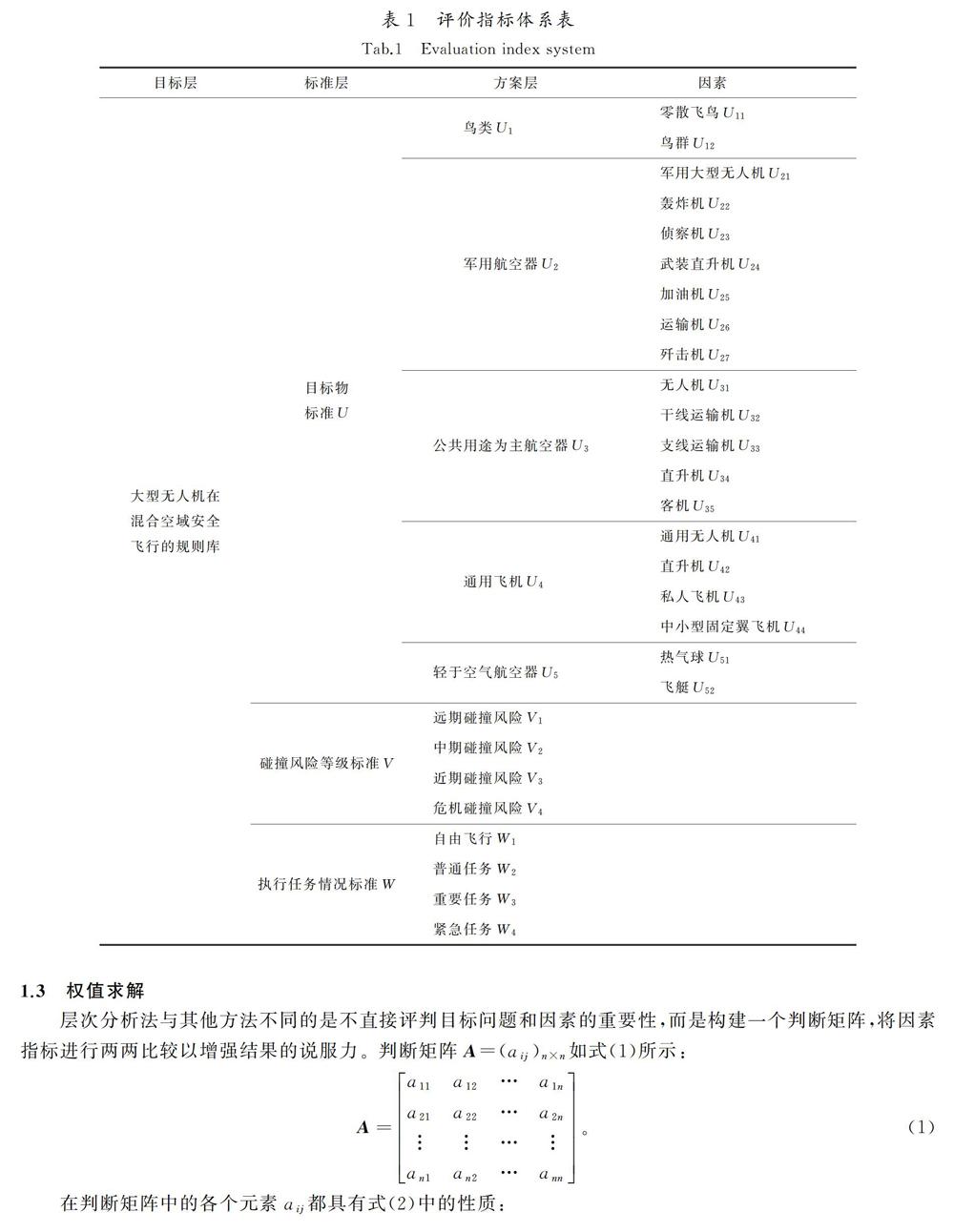
1.2评价指标
影响混合空域中大型无人机运行策略的因素是多方面的,而每个方面都可能成为一个评价指标。因此,构建一个科学、合理而又实用的评价指标体系,对大型无人机运行策略综合评价是非常重要的。评价指标体系的建立应当坚持从本专业相关专家的角度出发,与目标物的碰撞等级及各类航空器执行任务等级认为可从外界信息可知且具有时变性,将鸟类执行任务等级默认为自由飞行。
通过对本专业专家的调查,认为影响大型无人机在混合空域最优避让方案的因素主要包括大型无人机最优避让目标物标准U、碰撞风险等级标准V、执行任务情况标准w为标准层,再将标准层按照上述分类细化,建立构建大型无人机在混合空域安全飞行的评价指标体系表,如表1所示。
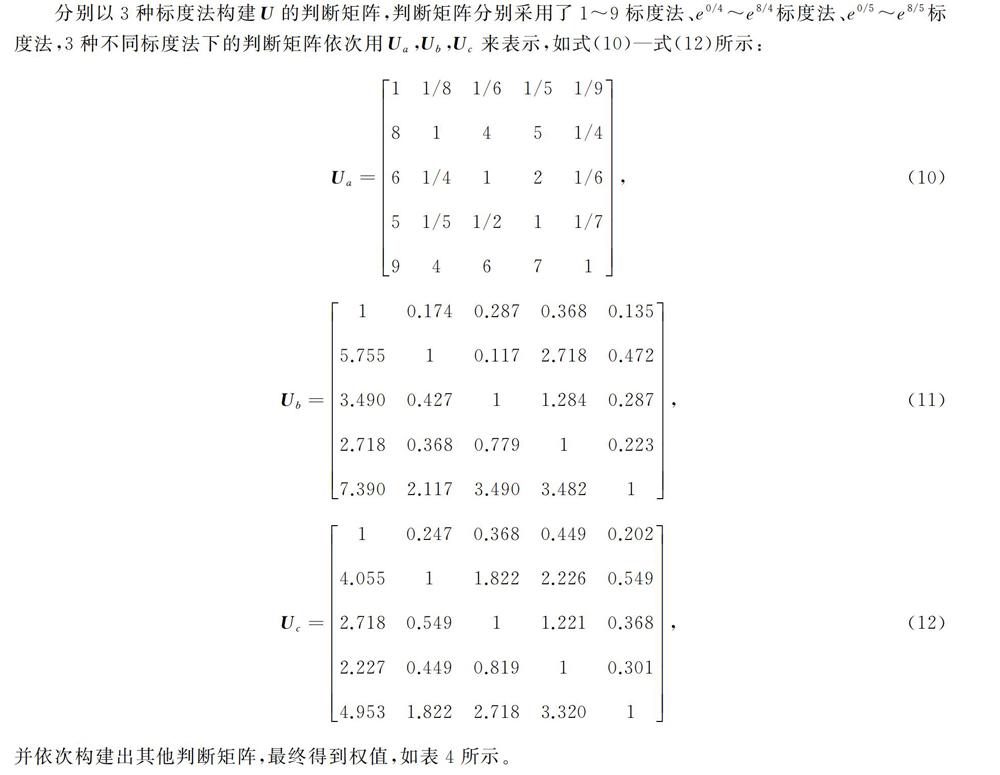
通过研读《中国民用航空空中交通管理规则》和《中华人民共和国飞行基本规则》等相关资料,并综合考虑专家意见,构建判断矩阵。
2结果与讨论
2.13种结构体系吸附过程的平衡并依次构建出其他判断矩阵,最终得到权值,如表4所示。
2.2隶属函数
隶属函数是用于表征模糊集合的数学工具,通过对已经确定出的各类指标权重分析发现,由层次分析法求得的权重值为一个固定的常数值。若要使大型无人机在复杂多变的混合空域环境中合理化地构建飞行规则库,还应根据实际需要对所求的指标权值进行合理化调整。例如当大型无人机在混合空域面临的风险为远期碰撞风险时,在标准层应当以一个更小的权重与之计算,从而减小无人机的不必要操作。当碰撞等级较高时,例如无人机处于危机碰撞风险时,更加要求无人机可以迅速地紧急避让,此时准则层的权重系数应当更高,以增加无人机的反应灵敏性。因此,在标准层确立更加符合无人机在复杂混合空域飞行的隶属函数,并对隶属函数进行比较、调整,最终得到更令人满意的大型无人机在混合空域中安全飞行的规则库。本文中隶属函数由专家判定法得出。
通过分析隶属函数的特点,选取高斯隶属函数、s型隶属函数、一般钟型隶属函数,通过文中所求的权值对隶属函数内的参数做出调整,并通过Matlab画出图形。
大型無人机最优避让目标物标准选取高斯隶属函数,设为f1,如图1所示。由图1可知,随着优先避让目标物权重值的增长。隶属度也随之增长,目标物权重较低的进一步小范围降低权重值,目标物权重值较大的更重要价值目标适当提升重要程度,以在小范围内增大区分度。
碰撞风险等级标准选取s型隶属函数,设为f2,如图2所示。
执行任务情况标准选取一般钟型隶属函数,设为f3,如图3所示。由图3可知,当碰撞风险等级较低即处于远期碰撞风险等级时,暂时对大型无人机在混合空域中飞行不构成威胁,此时将远期碰撞风险的权重归零,随着碰撞风险等级的提升,隶属度迅速提升,若大型无人机与目标物碰撞风险处于危机碰撞风险时,将隶属度提升至1,最大程度上保护无人机的飞行安全。
将鸟类的飞行活动自动定义为自由飞行,当鸟类飞行时,可缩减无人机避让鸟类的权重值,以使无人机尽可能优先避让执行任务等级较高权重的航空器。当大型无人机在混合空域中飞行,与其他执行任务较高的航空器相遇时,能够迅速提高避让优先级权值,以保证更有价值的作业优先完成。
2.3最终评价值的确定
将上述所求得的数据进行对应计算得出最终评价值,评价值越高,大型无人机采取优先避让策略。随着评价值的降低,避让优先级随之降低,从而形成大型无人机在混合空域中飞行的策略库,其中,碰撞风险等级与航空器执行任务情况是可变的,故所构建的策略库也具备一定的动态效果。随着碰撞风险等级以及航空器执行任务情况的变化,大型无人机能够自主地重新构建策略库。
2.4结果验证
大型无人机对具有较大评价值的目标进行优先避让,避让优先级按最终评价值的大小进行排序。以混合空域中可能出现的情况为例,假设在混合空域中大型无人机面临5个目标物的飞行情况,利用多标度层次分析法构建策略库,对该方法进行仿真验证,如表5所示。由此数据构建大型无人机在混合空域安全飞行规则库的优先避让方案,如表6所示。
假设此时飞艇接收到命令需要对执行任务等级进行变更,将执行普通任务变更为执行重要任务,那么根据多标度层次分析法所求得飞艇的最终评价值更改为0.3143,此时大型无人机在混合空域安全飞行的规则库的优先避让方案如表7所示。
由表7可以看出,更改飞艇的执行任务等级后,大型无人机对飞艇的优先避让等级大大提高。当然随着碰撞风险等级的改变也会有同样的效果,证明了该方法具有一定的动态效果,达到了预期目的。
3结语
本文针对未来空域开放的发展趋势,提出混合空域的概念,运用多标度的层次分析法建立了混合空域模型,并引入了隶属函数以更合理的构建大型无人机在混合空域中优先避让选择的规则库,另外此方法增大各类指标之间的区别度,最后完成了具有一定动态效果的混合空域规则库,使大型无人机在面临复杂的混合空域条件下可以更加智能的自主构建规则库确定优先避让等级。仿真结果符合预期值,证明了该方法在处理大型无人机在混合空域在构建具有动态效果的规则库时具有实用性和有效性。
本文不足之处是,无人机在面对评价指标体系表之外的目标物时,可能无法做出有效的避让策略,所以下一步的研究是如何使无人机在面对未加考虑的目标物时做出合理的避让策略。此外,本文中建立的隶属函数在理论上是可行的,但还需要在实际环境中通过实践来逐步对其完善。
