一种组合式气动柔性机械手设计
2020-05-22
(重庆科技学院 机械与动力工程学院, 重庆 400331)
引言
传统机器人是一种由刚性连接和关节构成的刚性装备,其设计目的是为了高效地执行任务,但适应性有限,对人类来说存在不安全的因素,在工厂中人与机器人的工作空间通常是分离的。机器人操作中的适应性通常是通过软件来实现的,这给控制系统和设计人员增加了较大的负担[1]。
为了解决刚性机器人适应性差的问题,当前较为理想的解决方法就是将灵活性纳入机器人本体,最大限度地降低机器人的刚度,采用更安全的软执行机构,通过变形吸收大部分的能量。这种方案为机器人在工厂、田野或家庭中与人类一起工作打开了大门[2]。气动机械手是国内外研究、设计、发展最为瞩目的一项技术[3-4],最早出现在1950年, 由医学博士JOSEPH L. MCKIBBEN首创[5],并应用于骨髓灰质炎患者的矫形器。最早的商用气动机械手是1980年日本的普利司通橡胶公司开发的。气动机械手作为一种典型的柔性驱动器,其特征在于平滑、准确和快速响应,并且完全伸展时也能够产生较大的力。气动机械手当前主要应用于生物仿生领域、医疗康复、工业、航空等领域[6]。
通常的气动柔性手主要使用硅胶、橡胶等软体材料制造,由压缩气体驱动,使手指内腔膨胀,产生变形弯曲,完成各种动作。但当前研制的各种气动柔性手均采用整体式的结构形式,存在的问题是:动作形式和控制方式单一、固定,缺乏多样性、灵活性,如果使用条件和要求发生改变,只有重新设计和制造新的气动柔性手[7-10]。
在吸收和消化国内外先进设计成果的基础上,创新设计了组合式气动柔性手指和由该手指组装成的可自由组合的多用途气动柔性机械手。气动柔性手指和机械手采用灵活、组合式的方式,可以最大限度地满足各种使用条件和要求,其软体特征特别适用于传统机械手不宜使用的脆性目标等对象。经过设计、分析、制造、应用后,达到良好的效果,已分别申请国家实用新型和发明专利,已获得的实用新型专利号是:ZL201620587032.0[11]和ZL201620589836.4[12]。
1 组合式气动柔性手指
1.1 有限元分析
图1是设计好的气动柔性手指段,在具体制作前,用ANSYS软件进行了详细的有限元分析优化,如图2所示,确定采用Ecoflex Supersoft 0030硅胶材料,充气变形部分壁厚1 mm,其余部分壁厚约3 mm,充气压力约120 kPa,可达到最优的效果。
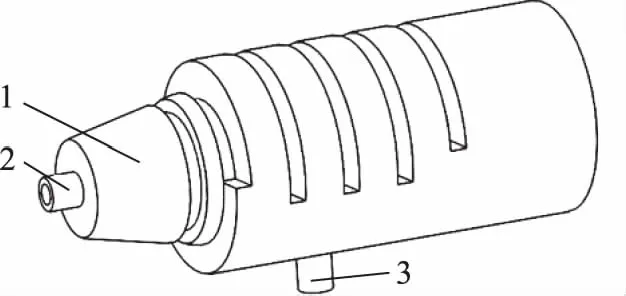
1.手指段凸端 2.连通气管 3.分支气管图1 组装好的气动柔性手指段

图2 气动柔性手指段有限元分析
1.2 具体制作过程
如图3所示,首先用3D打印的方法制造上模A1、下模A2、上模B1、下模B2。在真空箱中将液态硅胶浇注到模具中,以排除液态硅胶中的空气。待模具中的硅胶手指块固化成型后,将其取出,去除、清理硅胶手指块上的浇口、冒口等多余部分,如图4所示。
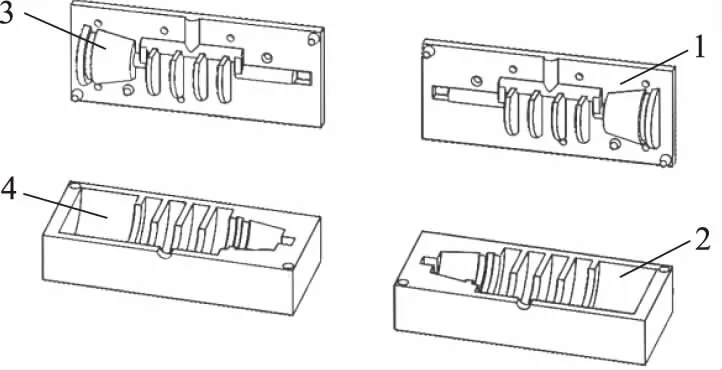
1.上模A1 2.下模A2 3.上模B1 4.下模B2图3 气动柔性手指模具
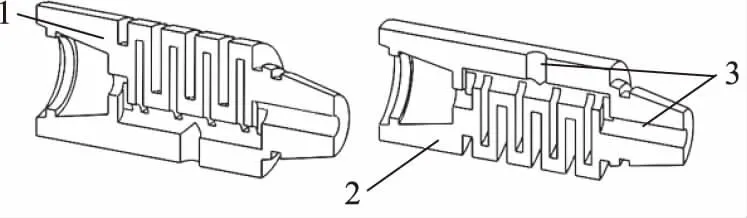
1.硅胶手指块A 2.硅胶手指块B 3.通气孔图4 脱模后的硅胶手指块
如图5所示,将分支气管和连通气管装入硅胶手指块的通气孔中,并用液态硅胶粘接;在硅胶手指块A、硅胶手指块B的结合面上均匀涂抹液态硅胶,合上并粘接,形成硅胶手指段。待液态硅胶固化后,将手指段凸端装入另一手指段凹槽中,指尖装入首端的手指段凹槽中。各手指段凸端圆周上有止口凹槽,各手指段凹槽圆周上有止口凸缘,相互形成紧密配合,以保证硅胶手指段装配时的准确定位,连接牢固。最后通过扎带将各硅胶手指段及指尖扎紧。装配好后,先充气测试,并用液态硅胶对漏气部位密封,保证各分支气管、连通气管和各硅胶手指段内部的气道、内腔相通,如图6所示。
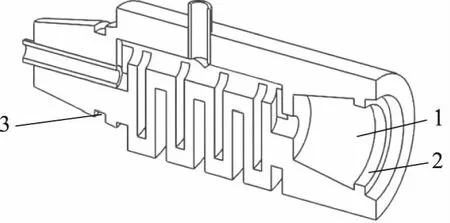
1.手指段凹槽 2.止口凸缘 3.止口凹槽图5 装配好分支气管和连通气管的硅胶手指段剖面图
1.3 动作控制方式
根据使用条件和动作要求, 确定硅胶手指段的装配数量,调整各硅胶手指段的安装角度。用蓝丁胶选择性封堵各硅胶手指段的分支气管或连通气管, 则可改变组合式气动柔性手指内的气体通路。通过选择控制从不同的分支气管或连通气管通入压缩气体,使硅胶手指段呈现不同的变形弯曲,完成各种不同的动作。
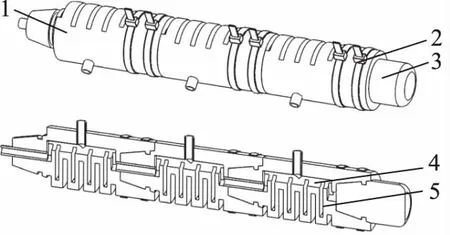
1.硅胶手指段 2.扎带 3.指尖 4.气道 5.内腔图6 装配好的各硅胶手指段及剖面图
组合式气动柔性手指主要采用以下2种控制方式:
(1) 整体控制方式:如图7所示,用蓝丁胶封堵各硅胶手指段的分支气管,保持各连通气管的畅通,并从手指末端的连通气管通入压缩气体,即可同时控制各硅胶手指段的变形弯曲。如图8所示,改变各段硅胶手指段的安装角度,从手指末端的连通气管通入压缩气体,组合式气动柔性手指呈现不同形态的变形弯曲。

1.蓝丁胶图7 整体控制方式变形A

图8 整体控制方式变形B
(2) 分段控制方式:用蓝丁胶封堵各硅胶手指段的连通气管,从各硅胶手指段的分支气管通入压缩气体,可分别控制各个硅胶手指段的变形弯曲,使组合式气动柔性手指呈现不同的变形弯曲。如图9所示,从左右两端的硅胶手指段的分支气管通入压缩气体,使其变形弯曲,而中间的硅胶手指段不通入压缩气体,使其保持原状。该方式可任意选择分别控制各段硅胶手指段,实现各种不同的动作。
动作完成后,释放各硅胶手指段内腔的压缩气体后,相应的硅胶手指段恢复原状,如图6所示。

图9 分段控制方式变形
2 可自由组合的多用途气动柔性机械手
如图10所示,将各组合式气动柔性手指装入在基座的安装孔中,按要求调整好各组合式气动柔性手指在基座上的安装角度,并夹紧、固定在基座上,形成类似人手的形状。通过压缩气体控制各组合式气动柔性手指的弯曲变形,使可自由组合的多用途气动柔性机械手完成各种动作。
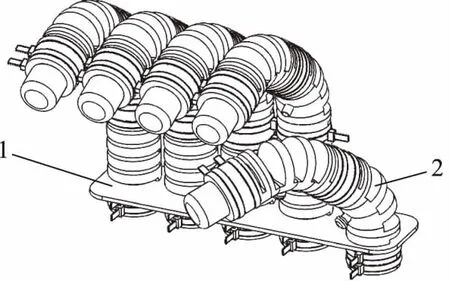
1.基座 2.气动柔性手指图10 装配好的气动柔性机械手
如果使用条件和动作要求改变,只需重新设计和制造基座,仍采用原有的组合式气动柔性手指,便可实现多用途的功能。如图11所示,在重新设计、制造的基座上安装、调整、夹紧、固定好3只组合式气动柔性手指,通过压缩气体使气动柔性手动作,可方便完成夹持脆性椭圆形物体的动作。

图11 用于夹持椭圆形物体的气动柔性机械手
3 结论
本设计可根据使用条件和要求自由组合成型,通过压缩气体控制各硅胶手指段的变形弯曲,使组合式气动柔性手指实现不同的动作。通过设计和制造不同类型的基座,按要求在上面安装好气动柔性手指,就可以满足多用途、自由组合的功能,最大限度的扩展了气动柔性机械手的功能和使用场合。为气动柔性机械手的设计、制造、应用提供了新的方法和思路,具有很好的应用价值。
